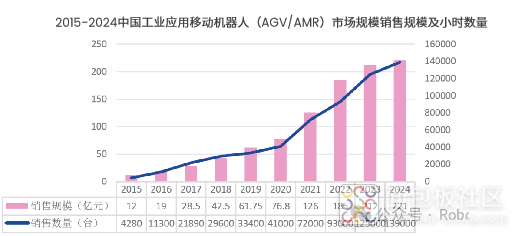
移动机器人:行业图景与发展洞察 在当今智能制造与智慧物流快速发展的时代背景下,移动机器人行业正以前所未有的力量重塑人类的生产方式与产业格局。过去十年间,中国的 AGV(Automated Guided Vehicle,自动导引车)/AMR(Autonomous Mobile Robot,自主移动机器人)产业实现了令人瞩目的 43.18% 的年复合增长率,成功从全球技术追随者跃升为创新策源地,成为推动制造业升级和物流效率提升的关键力量。 从汽车工厂的物料搬运到电商仓库的智能分拣,从半导体车间的精密运输到港口码头的全天候作业,移动机器人广泛应用于各个领域,不仅大幅提升了人工效率和仓储空间利用率,更在危化品处理等高风险领域实现了零事故突破,展现出其在保障生产安全和提升生产质量方面的巨大潜力。 当前,移动机器人的应用场景正不断拓展,从工业场景向电商、运输物流等领域渗透,从室内走向室外,从生产物流延伸至港口物流。与此同时,与 5G 通信技术以及 AI 大模型的深度融合,预示着具身智能体的诞生已指日可待。这场由移动机器人引领的智能革命,正在重新定义生产力的标准,并塑造人机协作的新文明范式,为人类的生产生活方式带来深远的变革。 一、近十年行业发展:从起步到腾飞 (一)市场规模与增速:爆发式增长的十年 2015 - 2025 年,中国移动机器人(AGV/AMR)行业经历了爆发式增长的黄金时期。2015 年,行业销售额仅为 12 亿元,销量为 1.13 万台。然而,自此之后,市场规模持续快速扩张,至 2023 年,销售额已攀升至 212 亿元,销量达到 12.5 万台。据预测,到 2025 年,销售额将突破 289 亿元,销量有望达到 15.39 万台,年复合增长率(CAGR)始终保持在 43.18% 的高位水平。 从增长率的具体变化来看,2020 年销售额增长率达到 35%,而 2023 年则有所放缓,为 14.59%,不过预计 2025 年将再次回升至 20%。销量方面,2020 年增长尤为显著,从 2015 年的 1.13 万台跃升至 4.1 万台,到 2024 年更是增长至 13.9 万台,相较于 2015 年增长超过 12 倍,这一惊人的增长幅度充分彰显了移动机器人市场在近年来所蕴含的巨大潜力和旺盛的生命力。 在产能利用率与全球市场占比方面,2025 - 2030 年的相关数据预估显示,2025 年行业产能预计达到 150 万台 / 年,产量为 130 万台 / 年,产能利用率为 86.7%,市场需求量则高达 140 万台 / 年,占全球市场份额的 28.5%。随着时间的推移,产能、产量和需求量均呈现稳步上升趋势,同时全球市场占比也将逐步提升,这意味着中国移动机器人行业在全球舞台上的影响力和话语权将不断增强,有望在未来的全球市场竞争中占据更加有利的地位,引领全球移动机器人产业的发展潮流。 (二)行业应用分布:多样化需求驱动市场分化 不同行业对移动机器人的需求呈现出明显的差异化特征。在新能源行业,由于其生产过程对机器人的负载能力和稳定性有着极高的要求,因此该领域对移动机器人的需求增速最快,年复合增长率超过 50%。随着全球对清洁能源的日益重视,光伏、锂电等新能源产业蓬勃发展,对自动化生产和物流的需求大增,推动了移动机器人在新能源领域的广泛应用,成为移动机器人行业增长的重要驱动力之一。 汽车制造行业则对机器人的精度和可靠性要求较高,移动机器人在该领域主要用于实现生产线的物料搬运、零部件装配等任务,能够有效提高汽车生产的自动化水平和质量稳定性,助力汽车制造企业提升生产效率和产品质量,适应市场竞争的需要。 电商物流行业则是移动机器人的另一大重要应用领域。电商的快速发展导致物流订单量呈爆发式增长,移动机器人在该领域的应用可实现自动化分拣、智能运输等功能,大大提高了物流效率和准确性,有效缓解了物流高峰期间的仓储和配送压力,提升了消费者购物体验,成为电商企业提升竞争力的关键因素之一。 3C 电子行业由于产品更新换代迅速、生产工艺复杂,对生产的柔性化要求极高,AMR(自主移动机器人)的渗透率在该领域逐渐提升,以满足不同产品的生产需求,帮助企业实现快速换线、灵活生产,降低生产成本,提高市场响应速度。 二、技术演进与产品创新:创新驱动行业发展 (一)导航技术迭代:从简单到智能 在移动机器人的发展历程中,导航技术的迭代升级起到了关键的推动作用。 2015 - 2020 年期间,磁条 / 二维码导航技术占据主导地位。磁条导航需要在地面铺设磁条,机器人通过感应磁条信号来实现导航;二维码导航则是在地面张贴二维码,机器人通过扫描二维码确定自身位置。这两种技术成本相对较低,但在灵活性方面存在不足,路径更改较为困难,活动范围也受到一定限制,难以满足复杂多变的应用场景需求。 2020 年以后,激光 SLAM(即时定位与地图构建)技术逐渐普及并成为主流。该技术利用激光雷达扫描周围环境,实时创建地图并确定机器人自身位置,无需预先铺设轨道或标记。AMR(自主移动机器人)采用激光 SLAM 技术的占比从 10% 迅速提升至 60%。激光 SLAM 技术具有更高的灵活性和自主性,能够适应复杂多变的环境,大大拓展了移动机器人的应用场景,使其能够在更多领域发挥重要作用,如在动态变化的仓库环境中实现高效、精准的货物搬运和存储。 到了 2024 年,多传感器融合技术成为行业发展的主流趋势。这种技术结合了视觉、激光雷达和IMU(惯性测量单元)等多种传感器的数据,实现了更精准的定位和环境感知。例如,视觉传感器可以识别物体和场景特征,为机器人提供丰富的视觉信息;激光雷达则能够提供高精度的距离信息,帮助机器人精确测量与周围物体的距离;IMU 用于测量机器人的姿态和运动状态,使其能够更好地感知自身在空间中的位置和运动变化。通过多传感器数据的融合处理,机器人能够在复杂环境中做出更准确的决策,同时支持 5G 实时决策,进一步提升了机器人的响应速度和智能化水平,为移动机器人在更广泛的领域和更复杂的任务中的应用提供了坚实的技术支撑。 在导航技术的发展过程中,Flash 纯固态激光雷达逐渐崭露头角,展现出独特的优势。其超小体积和超轻重量,使得机器人设计更加灵活,能够轻松应用于各种小型移动机器人,而不增加额外的负担。同时,超高线束的特点让机器人对环境的感知更加细致和精准,即使在复杂场景下也能实现高效、准确的导航,为移动机器人在高精度导航需求领域的应用提供了有力保障。 (二)典型产品创新:满足多样化需求 1.仓储机器人 2024 年,复合机器人成为行业热点。它集成了机械臂与 AMR,能够实现更复杂的操作任务,如在半导体生产线上完成芯片的搬运、检测和装配等工作,以及在医疗领域协助医护人员进行药品配送和样本运输等任务。头部企业通过持续的技术创新和专利布局,不断提升复合机器人的性能和应用范围。Flash 纯固态激光雷达的高精度环境感知能力为复合机器人的复杂操作提供了有力支持,使其能够在各种精细和复杂的生产环境中稳定、高效地运行,为高端制造业和医疗等领域的自动化升级提供了新的解决方案,推动了相关行业的技术进步和发展。 2.无人叉车 2018 - 2020 年期间,无人叉车开始兴起,并在随后的几年中迅速发展。2023 年,无人叉车销量达到 1.95 万台,同比增长 46.62%。无人叉车装有自主导航装置,能在无人操作状态下完成物料搬运等工作,具有稳定性高、灵活度大的特点,特别适用于高危环境。此外,无人叉车还可联通数据系统对货物搬运工作进行实时监督,从而提升工作效率。在无人叉车的导航技术升级过程中,Flash 纯固态激光雷达发挥了重要作用。其超高线束能够为无人叉车提供更精确的环境感知,使其在复杂仓储环境中实现高效、安全的货物搬运,降低人工操作风险,提高物流搬运的自动化程度和可靠性。 3.仓储机器人 2015 年,类 KIVA 仓储机器人开始出现,极智嘉、快仓等企业推出的相关产品推动了电商仓储效率的大幅提升。这类机器人通过在仓库地面铺设的网格轨道运行,实现货物的快速搬运和存储,使电商仓储效率提升了 50% 左右。头部企业在仓储机器人领域积极布局大量技术专利,涵盖导航算法、调度系统等核心技术,不断优化机器人的性能和功能,提高仓储机器人的智能化水平和作业效率,以应对电商行业日益增长的物流需求。 三、代表性企业:市场竞争日益激烈 在中国移动机器人(AGV/AMR)行业中,海康机器人、极智嘉、新松等头部企业之间展开了激烈的市占率争夺战,各自凭借自身的优势在市场中占据一席之地。 海康机器人依托海康威视强大的 AI 视觉技术,推出了一系列具有竞争力的产品,如潜伏式 AGV、F9-300 窄通道机器人等。2024 年,其在国内市场的份额达到 30%,无人叉车销量突破万台大关,全球 AMR 出货量超过 3.5 万台。海康机器人凭借其在技术、产品和市场渠道等方面的优势,不断拓展在制造业、电商物流等领域的市场份额,巩固其在行业内的领先地位。 极智嘉则以Roboshuttle货箱机器人、智能分拣系统等核心产品在市场中脱颖而出。2024 年,其全球市场份额达到 25%,海外收入占比超过 40%,在柔性调度算法方面处于行业领先地位。极智嘉通过不断优化产品性能和服务质量,积极拓展海外市场,与全球众多知名企业建立了合作关系,进一步提升了其在移动机器人领域的品牌知名度和市场影响力。 新松在汽车、重工领域具有深厚的技术积累和丰富的行业经验,市场份额达到 10%。新松凭借其强大的研发实力和定制化解决方案能力,为特定行业客户提供量身定制的移动机器人产品和解决方案,满足不同客户的个性化需求,在汽车制造、重工等传统优势领域持续保持较强的市场竞争力。 从亿元级企业数量来看,2024 年度中国市场 AGV/AMR 企业销售额过亿元的企业约有 42 家,近两年过亿企业数量趋于稳定,表明行业集中度较高。近三年前五企业销售规模在整体市场占比均超过 40%,头部企业的市场集中度优势明显,对行业的走向和发展具有重要的引领作用。 四、无人叉车:市场增长与技术突破 (一)技术突破与应用深化 在技术方面,无人叉车的导航技术取得了显著突破。激光导航在无人叉车中的占比从过去的较低水平迅速提升至 70%。早期的导航技术如磁条 / 二维码导航存在灵活性差等问题,而激光导航技术利用激光雷达扫描周围环境,能够实时创建地图并确定自身位置,具有高精度、高灵活性和强环境适应性等优点,为无人叉车的广泛应用提供了坚实的技术保障。 近年来,多传感器融合技术的发展进一步推动了激光导航的升级。通过结合视觉、激光雷达和 IMU 等多种传感器的数据,无人叉车能够实现更精准的定位和环境感知,在复杂环境中也能做出准确的决策,有效提升了无人叉车的智能化水平和作业能力,使其能够应对更加复杂的物流场景和任务需求。 Flash 纯固态激光雷达在无人叉车的应用中具有显著优势。其超小体积和超轻重量使得无人叉车的设计更加紧凑,能够更好地适应狭窄通道和有限空间。超高线束则为无人叉车提供了更精确的环境感知能力,使其在复杂场景下能够实现更精准的导航和操作,从而提高搬运效率和安全性,进一步拓展了无人叉车的应用范围和市场空间。 在新能源行业,无人叉车的应用场景不断深化。新能源行业对生产环境的安全性和稳定性要求较高,无人叉车能够满足这些要求。例如,在仓库货物的搬运过程中,无人叉车可以实现自动化操作,减少人工干预,降低安全风险,提高生产效率和物流管理水平。以海豚之星 AM1516 窄通道和 AS1530 堆垛 AGV 为例,它们在新能源行业有着出色的表现。这些叉车采用了先进的激光导航技术,能够在狭窄的通道中灵活运行。同时,它们还具备全流程监控与优化功能,通过智能算法优化库位货物摆放,提升空间利用率。在某新能源项目中,AS1530 实现了跨楼层、跨区域的高效搬运,减少了人工操作,提高了仓储运营效率,得到了客户的高度认可。 (二)市场爆发式增长 无人叉车市场在近年来呈现出爆发式增长态势。2024 年,无人叉车销量达到 2.45 万台,占整体移动机器人市场的 15%,同比增长 46.62%。这一增长背后蕴含着多方面的逻辑因素。 从政策层面来看,国家对智能制造、工业自动化的支持力度不断加大,出台了一系列鼓励企业进行智能化升级改造的政策措施。这些政策为无人叉车的应用提供了良好的政策环境,引导企业加大对无人叉车等智能物流设备的投入和应用,推动了无人叉车市场的快速发展。 在成本方面,随着人力成本的不断上升,企业面临着巨大的成本压力。无人叉车的一次性投入虽然相对较高,但其长期运营成本相对较低,能够有效降低企业的人力成本。同时,无人叉车的使用还能减少因人为操作失误带来的损失,进一步降低企业的运营成本,提高经济效益。因此,越来越多的企业开始选择无人叉车作为传统叉车的替代品,以实现成本控制和效益提升。 在效率方面,无人叉车具有更高的工作效率和准确性。它可以实现 24 小时不间断工作,大大提高了物流搬运的效率。而且,无人叉车能够精准地完成货物的搬运和存储任务,减少了货物损坏和丢失的风险,提高了物流作业的质量和可靠性,为企业带来更高的运营效率和更好的客户满意度。 从全球市场竞争格局来看,中国企业在无人叉车领域已经取得了一定的优势。2024 年全球推出的 52 款无人叉车新品中,中国企业占比达到 39%。随着技术的不断进步和市场的不断拓展,中国无人叉车企业有望在全球市场占据更大的份额,进一步提升中国在移动机器人领域的国际竞争力。 五、未来十年:机遇与挑战并存 (一)全球市场格局重构 未来十年,中国企业在东南亚、欧洲等海外市场的本土化服务能力建设将成为关键。随着市场竞争的加剧,客户对本地化服务的需求日益增长。中国企业需要深入了解当地市场需求、文化和法规,建立本地化的销售、售后和技术支持团队,提供更贴近客户的服务。 在东南亚市场,中国企业可以针对当地劳动力成本低、物流需求大的特点,推出性价比高的移动机器人产品,并提供定制化的解决方案。通过与当地企业合作,建立生产基地和销售网络,能够更好地满足东南亚市场的需求,提高市场份额。同时,还可以借鉴当地的运营模式和管理经验,降低成本,提升企业的竞争力。 在欧洲市场,注重环保和智能化的特点要求中国企业加强技术创新,提高产品的环保性能和智能化水平。例如,研发和应用更节能的电池技术、优化机器人的运动控制算法以降低能耗等,使产品符合欧洲市场对环保的严格要求。此外,积极参与当地的行业标准制定和认证,加强与欧洲科研机构和企业的合作,共同开展技术研发和创新,提升中国企业在欧洲市场的影响力和话语权。 此外,中国企业应积极拓展海外合作伙伴关系,与当地的产业链上下游企业建立紧密的合作,共同推动移动机器人行业的发展。通过与海外企业的合作,中国企业可以更好地了解当地市场的需求和趋势,引进先进的技术和管理经验,提升自身的竞争力。同时,还可以与海外合作伙伴共同开拓全球市场,实现互利共赢。 核心零部件国产化突破也是中国企业提升竞争力的重要途径。以往,激光雷达、芯片等核心零部件均需要依赖进口,近年来,伴随国产技术创新的发展,激光雷达和大算力芯片均开启了国产化进程。尤其是激光雷达产品,禾赛、速腾、华为已经稳居全球销量前三,而亮道智能的高线束纯固态 Flash 激光雷达、思岚科技的单线束激光雷达等,这些为工业界定制开发的激光雷达产品也在稳定出货。未来,中国企业应加大研发投入,突破核心技术,实现核心零部件的国产化,降低成本,提高产品的稳定性和可靠性,从而在全球市场竞争中占据更加有利的地位。 (二)技术融合创新方向 未来十年,移动机器人行业将迎来具身智能与 AI 大模型的深度融合。具身智能赋予机器人感知和理解环境的能力,使其能够在复杂场景中灵活行动;而 AI 大模型则为机器人提供强大的决策和学习能力,实现更高效的任务执行。例如,DeepSeek大模型的应用将推动机器人自主决策能力的提升,响应速度可达毫秒级,使其能够快速应对各种突发情况,如在物流仓库中面对货物堆放不规则、通道拥堵等问题时,能够迅速做出最优决策,调整行动路径,确保物流效率不受影响。 这种融合将使移动机器人从单纯的执行工具转变为具有智能思维的合作伙伴。它们可以根据环境变化自主调整行动策略,与人类进行更自然的交互,进一步拓展应用场景。例如,在未来的智能工厂中,移动机器人可以与工人协同工作,根据生产任务的变化和工人的操作习惯,自动调整工作方式和节奏,提高生产效率和质量;在医疗领域,移动机器人可以与医护人员密切配合,完成药品配送、样本运输、患者护理辅助等任务,提升医疗服务水平和效率。 同时,Flash 纯固态激光雷达技术也将不断创新和优化。其在移动机器人中的应用将更加广泛,进一步提升机器人的导航精度、环境感知能力和智能化水平。随着技术的成熟和成本的降低,Flash 纯固态激光雷达有望成为移动机器人的标配,推动行业的快速发展,使移动机器人能够更加精准地感知周围环境,实现更复杂的任务和功能,如在动态变化的环境中进行实时避障、多机器人协同作业等,为移动机器人行业带来新的发展机遇。 六、成就、挑战与应对策略 (一)可持续发展战略建议 为了实现移动机器人行业的可持续发展,提出以下战略建议: 1. 专利布局 :企业应加强技术研发,积极申请专利,构建专利壁垒,保护自身技术创新成果,提升市场竞争力。通过建立完善的专利体系,企业可以在技术研发和市场竞争中占据主动地位,防止技术被侵权和模仿,同时也可以通过专利许可和转让等方式获得额外的经济收益。 2. 生态链整合 :加强产业链上下游合作,整合资源,实现优势互补,共同推动行业发展。例如,与核心零部件供应商紧密合作,确保供应链稳定,避免因零部件供应短缺或质量问题影响生产;与系统集成商、软件开发商等合作,提供更完善的解决方案,满足客户多元化的需求;与科研机构和高校合作,开展产学研联合项目,加速技术成果转化和人才培养,为行业的技术创新和可持续发展提供有力支持。 3. 人才储备 :加大对专业人才的培养和引进力度,建立完善的人才培养体系,为行业发展提供智力支持。移动机器人行业涉及机械工程、电子工程、计算机科学、自动化控制、人工智能等多个学科领域,需要大量具备跨学科知识和技能的复合型人才。企业应通过内部培训、外部招聘、校企合作等方式,吸引和培养一批高素质的专业人才队伍,为企业的技术研发、产品创新和市场拓展提供坚实的智力保障。 4. 标准化体系建设 :参与和推动行业标准的制定,规范市场秩序,提高行业整体水平,促进行业可持续发展。通过制定统一的技术标准和规范,可以促进不同企业产品之间的兼容性和互操作性,提高市场的透明度和公平性,降低用户的使用成本和风险,增强用户对移动机器人的信任和接受度,从而推动整个行业的健康发展。 5. 技术迭代 :持续关注和投入多传感器融合导航、激光雷达高精定位、深度强化学习算法、人工智能等前沿技术的研发和应用,进一步提升无人叉车、复合机器人等移动机器人的精度和效率,以适应不断变化的市场需求和竞争环境。通过技术创新和产品升级,企业可以在激烈的市场竞争中保持领先地位,不断拓展市场份额和应用领域,实现可持续发展的目标。 (二)阶段性发展成果凝练 在过去的发展历程中,中国移动机器人行业取得了显著的阶段性成果。 在技术自主化方面,近十年行业实现了从依赖国外技术到自主研发创新的转变。导航技术从磁条 / 二维码主导发展到激光 SLAM 普及,再到多传感器融合成主流,核心技术不断突破,部分企业在全球处于领先地位。例如,国内一些企业在激光 SLAM 导航算法、多传感器融合技术等方面的创新成果,不仅提升了自身的竞争力,还为全球移动机器人技术的发展做出了贡献,推动了行业的技术进步。 在市场国际化方面,头部企业积极拓展海外市场,如极智嘉海外收入占比超 40%,海豚之星 2024 年海外市场占比提升至 35%,中国企业在全球市场的影响力逐渐增强。通过海外市场的拓展,中国企业不仅扩大了业务范围和市场份额,还与国际知名企业建立了合作关系,学习和借鉴国际先进的管理经验和技术理念,进一步提升了自身的发展水平。 在应用多元化方面,移动机器人的应用从传统的物流、制造领域拓展到新能源、医疗、教育等多个领域,应用场景不断丰富。这充分体现了移动机器人的灵活性和广泛适用性,能够为不同行业的客户提供定制化的解决方案,满足多样化的市场需求,推动了各行业的智能化升级和创新发展。 然而,行业也存在同质化竞争隐忧。部分企业产品和技术趋同,可能导致价格战等不良竞争,影响行业健康发展。在追求市场扩张和份额增长的过程中,一些企业可能忽视了产品创新和质量提升,仅仅通过降低价格来吸引客户,这不仅会压缩企业的利润空间,还可能损害整个行业的形象和声誉,阻碍行业的可持续发展。 (三)市场规模预测 预计到 2029 年,中国无人叉车市场规模将超过 140 亿元,复合增长率保持在 28% 以上,销售总台量将达到 105000 台,海外市场将达到 73500 台,海外市场年均增长率将保持在 70% 左右;中国 AGV/AMR 总量在 2029 年将达到 280000 台,海外市场销量占到 115000 台,海外市场年均增长率保持在 40% 左右。可以预见,海外市场将是中国 AGV 和无人叉车蓬勃增长的动力引擎和主要战场,为中国 AGV 行业提供巨大的发展空间和增长动力,这也符合当下中国 AGV 企业全力出海的战略布局,有望在未来全球移动机器人市场中书写更加辉煌的篇章。 微信号| Robo Lab 重构机器「看见世界」的方式。 用硬核科普+实战案例,拆解光束背后的科技革命。 欢迎关注“Robo Lab 机器人实验室”

 标签: 导航技术
标签: 导航技术

