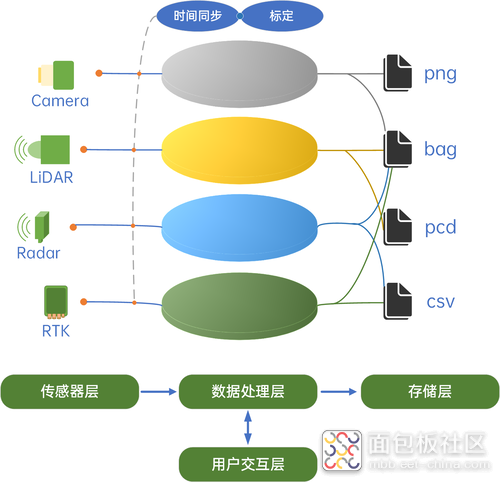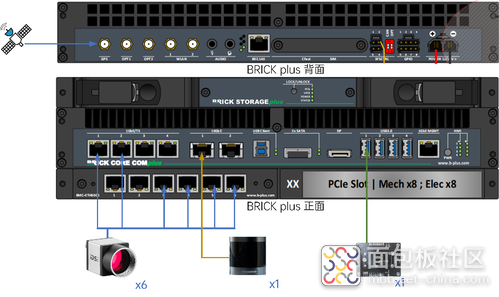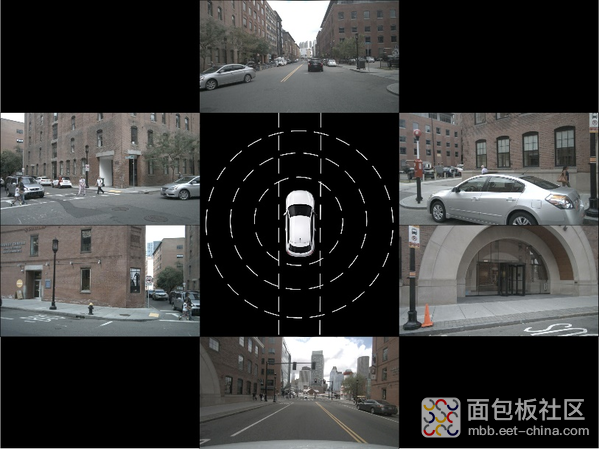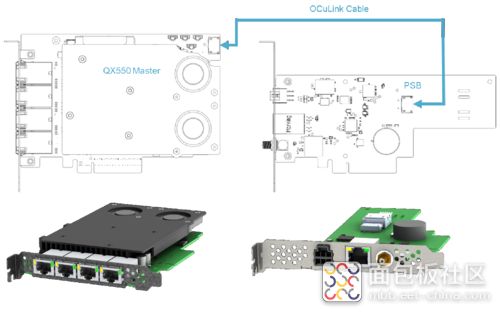
在自动驾驶快速从L2向L3、L4级别发展, 微秒级 甚至 纳秒级精度 的时间同步已成为系统性能的核心指标之一。 多传感器融合场景 下,激光雷达、摄像头、毫米波雷达等设备的时空对齐依赖 统一的时间基准 ;而在复杂工业环境中, 电磁干扰 、 时钟源故障 等风险对时间同步的可靠性提出了更高要求。 本文分享 PSB (Platform Sync Board)与 QX550 组合方案,基于 硬件级时间同步架构 与 冗余设计 ,为上述挑战提供了系统性解决方案。本文将具体介绍方案架构和应用实例。 一、PSB+QX550方案架构 PSB+QX550 方案中, QX550 作为 PCIe 3.0 x8 网络卡,搭载 双 Intel X550-AT2 控制器,提供 4 个 10Gbase-T 接口,支持 IEEE 1588v2(PTP)和 802.1AS-2020(gPTP)协议。配套的 PSB 模块 则通过 Intel i210IT 芯片、u-blox GPS 模块及PPS(脉冲每秒)接口,实现 硬件级时间戳同步 与 多源时间校准 。 两者通过 OCuLink 线缆实现数据与时钟信号的低延迟传输,结合 XTSS (eXtended Time Synchronization Service)软件套件,构建了 “ 高精度同步 + 多源冗余 + 失效容错 ” 的完整技术链路。 图1:PSB+QX550 二、核心技术特性 1、多传感器融合时间对齐:硬同步与全域协同 PSB+QX550 方案通过XTSS 服务实现 跨设备的亚微秒级时间同步 ,其核心由 CTSS(Cluster Time Synchronization Service)和 PTSS(Platform Time Synchronization Service)组成: (1)PTSS 平台同步: 利用硬件时间戳技术,同步同一设备内的多个以太网接口(如 QX550 的 4 个 10G 接口),确保多传感器数据采集时戳与系统时钟的一致性。例如,在自动驾驶测试中,可实现激光雷达点云数据与摄像头视频流的时间对齐,消除传感器间的时序偏差。 图2:PTSS平台同步 (2)CTSS 集群同步: 通过 (g)PTP 协议实现跨设备集群同步,支持主从模式下的时间分发。QX550 Master 通过 PPS 同步线缆连接最多 3 个 Slave 设备(如其他 QX550 或第三方 XTSS 兼容设备),形成 星型同步网络 ,满足分布式传感器阵列的全局时间统一需求。 图3:CTSS集群同步 2、复杂环境下时间源可靠性:多源冗余抗干扰 PSB 模块 通过 多元化时间源配置 ,提升复杂环境下的同步可靠性: (1)GPS 与外部时钟冗余: 内置 u-blox GPS 模块支持 NMEA 协议,通过 GPS antenna (端口4) 接口接收卫星信号,提供 UTC 时间基准;同时SER/PPS(端口2)支持外部 PPS 信号输入(如惯导或其他 grandmaster 时钟),通过 隔离设计 ,抵抗工业环境中的电磁干扰。 图4:PSB多源时间同步配置 (2)时钟源无中断切换机制: 当 GPS 信号失效时,系统作为从时钟仍同步至网络主时钟;若设备因此成为主时钟,则自动切换至内部振荡器(基于 QX550 硬件计数器),并通过‘ Local Oscillator Hot Standby ’维持最后已知的有效时间基准,避免主从切换导致的同步中断。 3、时间同步的失效容错:静态配置与动态监测 方案通过 多重容错机制 保障系统鲁棒性: (1)静态端口状态配置: 通过 XTSS Configurator 设置接口的固定端口状态(Master/Slave/Disabled), 强制指定主时钟节点 ,避免因 BMCA(最佳主时钟算法)协商失败导致的同步失效。例如,在关键工业场景(如自动驾驶数据采集)中,可锁定某一 QX550 为永久 Master,防止因网络波动导致的主从切换。 (2)时间偏差阈值监测(偏差矫正): XTSS 实时监测本地时钟与主时钟的偏差,当超过预设阈值(如 1000ns)时, 标记状态并自动重新同步 。结合 “Force AS capable” 功能,即使路径延迟测量失效,仍强制发送同步消息,确保紧急情况下的最小同步精度。 图5:GPS时间源下偏差矫正示意图 (3)多域隔离机制: 支持最多 10 个 PTP 域并行运行,不同域的时间同步 相互独立 。例如,可将安全关键型传感器与非关键设备划分至不同域,避免单一域的故障影响全局系统。 三、应用案例 在自动驾驶数据采集过程中,常采用 惯导(RTK) 作为授时源并输出自车姿态数据。此外,惯导数据应与各传感器(相机、激光雷达等)数据时间戳对齐。这时就需要在数据采集平台上有这么一个模块,完成 各个传感器时域统一 。 以 华测惯导CGI430 为例,它支持 PPS+GPRMC 方式完成授时,与PSB+QX550模块链接,进而完成整个系统的时间同步。 图6:惯导授时 四、总结 随着大家普遍认同硬件时间戳的不可替代性以及多源冗余架构的必要性,目前自动驾驶时间同步技术发展趋势已经从“ 是否需要同步 ” 转向 “ 如何在复杂场景下实现稳定同步 ”,更聚焦于时间同步是否满足“ 高精度、高可靠、易集成 ”。 对于工程师而言,方案的可实施性和故障容错能力是关键。比如PSB+QX550采用 即插即用 的设计,可以有效的应用到不同测试方案中实现系统时间同步。基于偏差矫正的能力,可以 避免时钟源偏差 。 未来,随着 5G-A 和车路协同的普及,时间同步将从 “ 车载刚需 ” 延伸至 “ 全域协同 ”,推动行业向纳秒级精度迈进。



 标签: 时间同步
标签: 时间同步