
1、步进电机驱动器细分定义
要了解步进电机驱动器的“细分”,先要弄清步进电机“步距角”这个概念:它表示控制系统每发一个步进脉冲信号,电机所转动的角度。电机出厂时给出了一个步距角的值,如电机给出的值为 7.5°/15°(表示半步工作时为7.5°、整步工作时为15°),这个步距角可以称之为“电机固有步距角”,它不一定是电机实际工作时的真正步距角,真正的步距角和驱动器有关。
步进电机通过细分驱动器的驱动,其步距角变小了,如驱动器工作在10细分状态时,其步距角只为“电机固有步距角”的十分之一,也就是说:当驱动器工作在不细分的整步状态时,控制系统每发一个步进脉冲,电机转动7.5°;而用细分驱动器工作在 10细分状态时,电机只转动了1.5°,这就是细分的基本概念。
细分功能完全是由驱动器靠精确控制电机的相电流所产生的,与电机无关。
2、步进电机驱动器细分的优点
驱动器细分后的主要优点为:
消除了电机的低频振荡:低频振荡是步进电机(尤其是反应式电机)的固有特性,而细分是消除它的唯一途径,如果步进电机有时要在共振区工作(如走圆弧),选择细分驱动器是唯一的选择。
提高了电机的输出转矩:尤其是对三相反应式步进电机,其力矩比不细分时提高约百分之30-40 。
提高了电机的分辨率:由于减小了步距角、提高了步距的均匀度,“提高电机的分辨率”是不言而喻的。
3、步进电机驱动器细分的缺点
由于要连续将细分数据写入ADC,细分越多,数据量就大,占用CPU资源,所以一般仅仅作为一个单独的模块。
以上这些优点,尤其是在性能上的优点,并不是一个量的变化,而是质的飞跃。根据记录,原来使用不细分驱动器的用户通过比较后,大都改选为细分驱动器。所以建议最好选用细分驱动器。
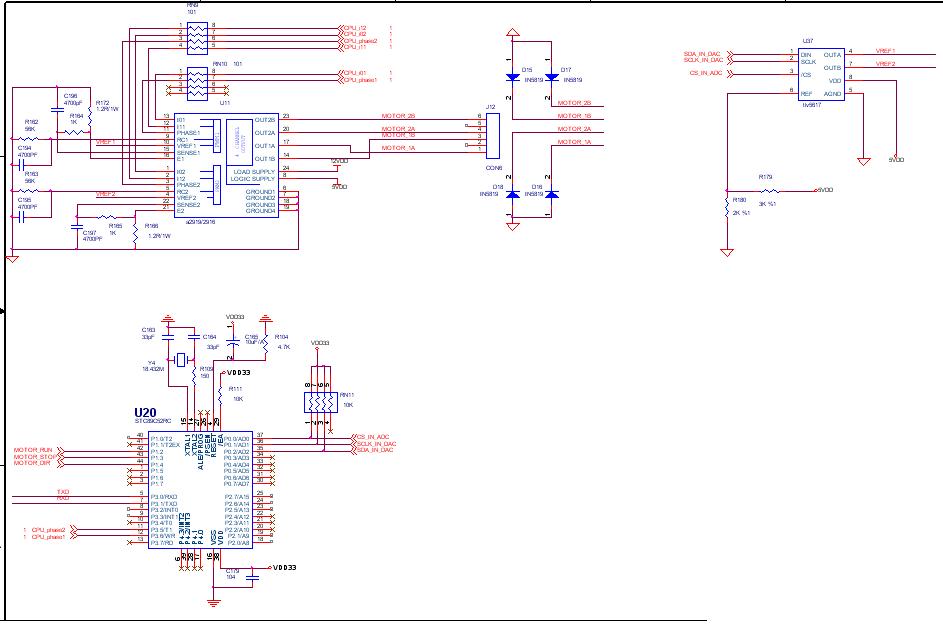
4、步进电机细分驱动电路
用户1721519 2013-12-5 09:40
用户1542257 2012-5-29 08:52
分享分享!
用户1639671 2011-12-21 15:06
用户1379339 2011-12-6 17:03
用户1620211 2011-8-11 15:30
用户1610078 2011-7-29 09:54
用户1326782 2011-7-8 22:26
用户1585933 2011-6-21 15:40
用户1460551 2011-6-2 09:53
用户1610707 2011-5-30 15:35