
力科在2008年10月推出了新一代的串行数据分析选件——SDAII,SDAII可以测量某误码率的眼图轮廓,是目前实时示波器中唯一可以测量误码率眼图的解决方案。在力科示波器的操作界面如图4所示,在测量到眼图后,选择“Show IsoBER”,点击Start IsoBER Scan即可得到多个误码率下的眼图轮廓。缺省的误码率是从10的-6次方扫描到10的-12次方,起始BER和结束BER可自定义。 基于误码率的眼图轮廓测试在力科SDAII中称为ISOBER。
|
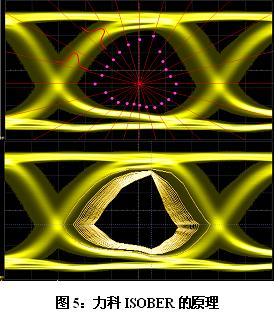
图5:力科ISOBER的原理 |
在力科示波器中,测量到一定数量比特叠加的眼图后,以眼的中心为原点,以若干条对角线对眼图进行切割,如图5所示的红色直线是对眼图进行切割,计算出眼图在每条切割线上的直方图,如图5中红色抛物线所示。使用MJSQ文档的Dual-Dirac模型对直方图的尾部进行拟合与外插值,推算出更多统计样本时的直方图分布,即低误码率时的直方图的极值。把每条切割线上的直方图在同一误码率的极值的座标用直线连接,得到图5下部分所示为各个误码率的眼图轮廓。为了保证直方图外插值的精度,通常需要累积上百万个比特的眼图后再进行ISOBER scan。(关于Dual-Dirac模型的详细介绍,参考MJSQ文档)
ISOBER的应用
ISOBER可以快速测量出低误码率时的眼图轮廓,对于高速串行信号的分析与验证非常实用。如下图6所示是用力科示波器测量两个3.125Gbps信号的ISOBER图。可见,在同样测量了140万个比特的眼图后,两者的眼图非常接近,眼高与眼宽也比较接近。但是,使用ISOBER扫描后,BER=10 的眼图轮廓相差较大。在BER=10 时,左半部分的眼图轮廓远小于右半部分的眼图轮廓,说明右半部分的高速串行信号的整体性能优于左半部分的。

图
:两个串行数据ISOBER结果比较图6
如果我们同时对两路串行信号进行抖动分析,抖动分解结果如表1所示。可以发现前者的随机抖动Rj较大(高达10.11ps),后者的周期性抖动较大(36.37ps)。由于BER=10 的总体抖动Tj(1e-12) = Dj + 14.07 * Rj ,随机抖动Rj对于总体抖动Tj的影响很大。尽管后者的Pj大于前者,但是前者的Rj大于后者,最终前者的Tj(1e-12)大于后者,所以不难理解为何前者的BER=10 的眼图轮廓小于后者了。
|
|
Tj(1e-12) |
Rj(RMS) |
Dj |
Pj |
|
左半部分的串行数据 |
148.69ps |
10.11ps |
10.47ps |
5.82ps |
|
右半部分的串行数据 |
91.8ps |
4.1ps |
36.5ps |
36.37ps |
|
表1:两个串行数据信号的抖动对比 |
在串行数据链路中,随机抖动通常来自于高速收发器的时钟,参考时钟经过锁相环倍频后为高速收发器提供时钟,如果PLL的输入时钟的随机抖动较大时,经过PLL倍频后成比例增大(与PLL的倍数相同)。对于左半部分的串行数据链路,需要测量和分析参考时钟和PLL。而周期性抖动通常来自于开关电源噪声和串扰,对于右半部分的串行数据链路,需要测量和分析高速收发器的电源噪声、PLL的电源噪声与抖动。
结语:在力科开发ISOBER之前,业界只能使用BERT或者采样示波器来测量基于误码率的眼图,而BERT和采样示波器的普及率较低。实时示波器作为电子工程师最频繁使用的通用仪器,力科的串行数据分析选件的ISOBER功能可以快速的测量低误码率下的眼图轮廓,为高速串行数据的分析和验证提供了更好的方法。
参考文献
1, Fibre Channel – Method Jitter and Signal Quality Specification – MJSQ, T11.2/Project 1315-DT/Rev 14.1, June 5, 2005.


 /5
/5 






文章评论(0条评论)
登录后参与讨论