技巧一:使用LDO稳压器,从5V电源向3.3V系统供电标准三端线性稳压器的压差通常是 2.0-3.0V。要把 5V 可靠地转换为 3.3V,就不能使用它们。压差为几百个毫伏的低压降 (Low Dropout, LDO)稳压器,是此类应用的理想选择。图 1-1 是基本LDO 系统的框图,标注了相应的电流。从图中可以看出, LDO 由四个主要部分组成:
1. 导通晶体管
2. 带隙参考源
3. 运算放大器
4. 反馈电阻分压器
在选择 LDO 时,重要的是要知道如何区分各种LDO。器件的静态电流、封装大小和型号是重要的器件参数。根据具体应用来确定各种参数,将会得到最优的设计。
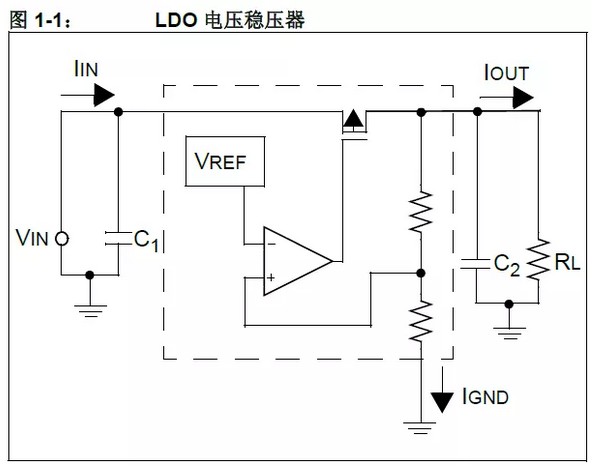
LDO的静态电流IQ是器件空载工作时器件的接地电流 IGND。 IGND 是 LDO 用来进行稳压的电流。当IOUT>>IQ 时, LDO 的效率可用输出电压除以输入电压来近似地得到。然而,轻载时,必须将 IQ 计入效率计算中。具有较低 IQ 的 LDO 其轻载效率较高。轻载效率的提高对于 LDO 性能有负面影响。静态电流较高的 LDO 对于线路和负载的突然变化有更快的响应。
技巧二:采用齐纳二极管的低成本供电系统这里详细说明了一个采用齐纳二极管的低成本稳压器方案。

可以用齐纳二极管和电阻做成简单的低成本 3.3V稳压器,如图 2-1 所示。在很多应用中,该电路可以替代 LDO 稳压器并具成本效益。但是,这种稳压器对负载敏感的程度要高于 LDO 稳压器。另外,它的能效较低,因为 R1 和 D1 始终有功耗。R1 限制流入D1 和 PICmicro® MCU的电流,从而使VDD 保持在允许范围内。由于流经齐纳二极管的电流变化时,二极管的反向电压也将发生改变,所以需要仔细考虑 R1 的值。
R1 的选择依据是:在最大负载时——通常是在PICmicro MCU 运行且驱动其输出为高电平时——R1上的电压降要足够低从而使PICmicro MCU有足以维持工作所需的电压。同时,在最小负载时——通常是 PICmicro MCU 复位时——VDD 不超过齐纳二极管的额定功率,也不超过 PICmicro MCU的最大 VDD。
技巧三:采用3个整流二极管的更低成本供电系统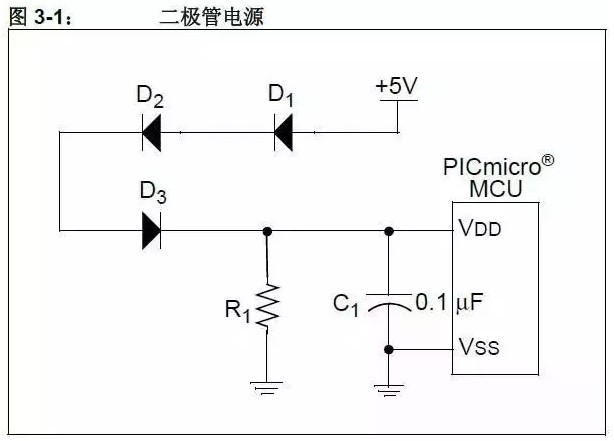
图 3-1 详细说明了一个采用 3 个整流二极管的更低成本稳压器方案。
我们也可以把几个常规开关二极管串联起来,用其正向压降来降低进入的 PICmicro MCU 的电压。这甚至比齐纳二极管稳压器的成本还要低。这种设计的电流消耗通常要比使用齐纳二极管的电路低。
所需二极管的数量根据所选用二极管的正向电压而变化。二极管 D1-D3 的电压降是流经这些二极管的电流的函数。连接 R1 是为了避免在负载最小时——通常是 PICmicro MCU 处于复位或休眠状态时——PICmicro MCU VDD 引脚上的电压超过PICmicro MCU 的最大 VDD 值。根据其他连接至VDD 的电路,可以提高R1 的阻值,甚至也可能完全不需要 R1。二极管 D1-D3 的选择依据是:在最大负载时——通常是 PICmicro MCU 运行且驱动其输出为高电平时——D1-D3 上的电压降要足够低从而能够满足 PICmicro MCU 的最低 VDD 要求。
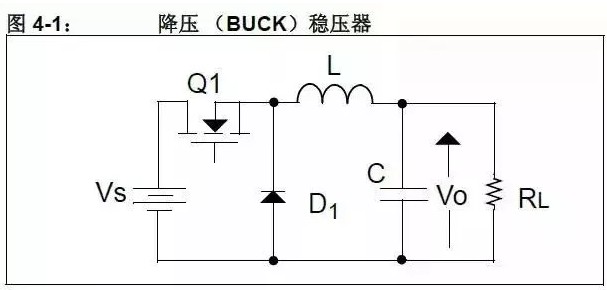
技巧四:使用开关稳压器,从5V电源向3.3V系统供电如图 4-1 所示,降压开关稳压器是一种基于电感的转换器,用来把输入电压源降低至幅值较低的输出电压。输出稳压是通过控制 MOSFET Q1 的导通(ON)时间来实现的。由于 MOSFET 要么处于低阻状态,要么处于高阻状态(分别为 ON 和OFF),因此高输入源电压能够高效率地转换成较低的输出电压。
当 Q1 在这两种状态期间时,通过平衡电感的电压- 时间,可以建立输入和输出电压之间的关系。
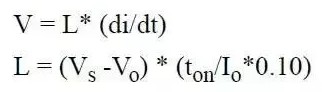
对于 MOSFET Q1,有下式:
在选择电感的值时,使电感的最大峰 - 峰纹波电流等于最大负载电流的百分之十的电感值,是个很好的初始选择。
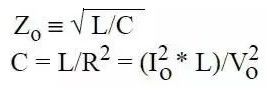
在选择输出电容值时,好的初值是:使 LC 滤波器特性阻抗等于负载电阻。这样在满载工作期间如果突然卸掉负载,电压过冲能处于可接受范围之内。
在选择二极管 D1 时,应选择额定电流足够大的元件,使之能够承受脉冲周期 (IL)放电期间的电感电流。
数字连接
在连接两个工作电压不同的器件时,必须要知道其各自的输出、输入阈值。知道阈值之后,可根据应用的其他需求选择器件的连接方法。表 4-1 是本文档所使用的输出、输入阈值。在设计连接时,请务必参考制造商的数据手册以获得实际的阈值电平。

技巧五:3.3V →5V直接连接将 3.3V 输出连接到 5V 输入最简单、最理想的方法是直接连接。直接连接需要满足以下 2 点要求:
• 3.3V输出的 VOH 大于 5V 输入的 VIH
• 3.3V输出的 VOL 小于 5V 输入的 VIL
能够使用这种方法的例子之一是将 3.3V LVCMOS输出连接到 5V TTL 输入。从表 4-1 中所给出的值可以清楚地看到上述要求均满足。
3.3V LVCMOS 的 VOH (3.0V)大于5V TTL 的VIH (2.0V)
且
3.3V LVCMOS 的 VOL (0.5V)小于 5V TTL 的VIL (0.8V)。
如果这两个要求得不到满足,连接两个部分时就需要额外的电路。可能的解决方案请参阅技巧 6、7、 8 和 13。
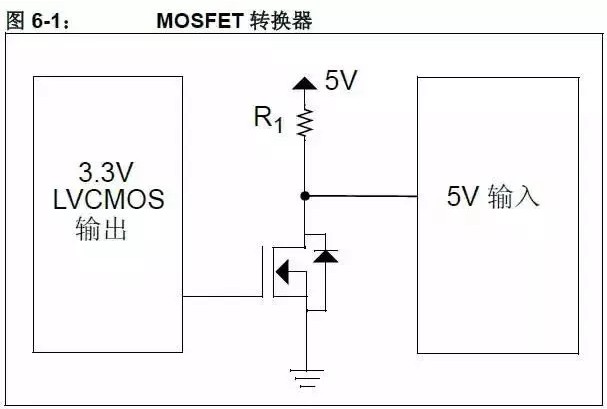
技巧六:3.3V→5V使用MOSFET转换器如果 5V 输入的 VIH 比 3.3V CMOS 器件的 VOH 要高,则驱动任何这样的 5V 输入就需要额外的电路。图 6-1 所示为低成本的双元件解决方案。
在选择 R1 的阻值时,需要考虑两个参数,即:输入的开关速度和 R1 上的电流消耗。当把输入从 0切换到 1 时,需要计入因 R1 形成的 RC 时间常数而导致的输入上升时间、 5V 输入的输入容抗以及电路板上任何的杂散电容。输入开关速度可通过下式计算:

由于输入容抗和电路板上的杂散电容是固定的,提高输入开关速度的惟一途径是降低 R1 的阻值。而降低 R1 阻值以获取更短的开关时间,却是以增大5V 输入为低电平时的电流消耗为代价的。通常,切换到 0 要比切换到 1 的速度快得多,因为 N 沟道 MOSFET 的导通电阻要远小于 R1。另外,在选择 N 沟道 FET 时,所选 FET 的VGS 应低于3.3V 输出的 VOH。
技巧七:3.3V→5V使用二极管补偿表 7-1 列出了 5V CMOS 的输入电压阈值、 3.3VLVTTL 和 LVCMOS 的输出驱动电压。

从上表看出, 5V CMOS 输入的高、低输入电压阈值均比 3.3V 输出的阈值高约一伏。因此,即使来自 3.3V 系统的输出能够被补偿,留给噪声或元件容差的余地也很小或者没有。我们需要的是能够补偿输出并加大高低输出电压差的电路。
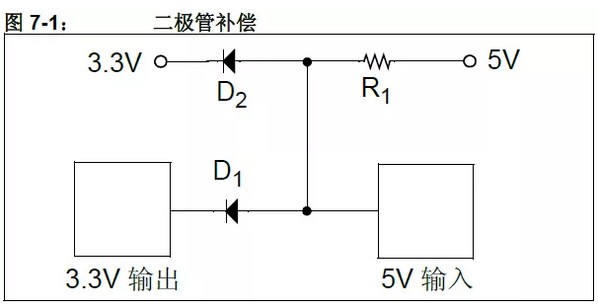
输出电压规范确定后,就已经假定:高输出驱动的是输出和地之间的负载,而低输出驱动的是 3.3V和输出之间的负载。如果高电压阈值的负载实际上是在输出和 3.3V 之间的话,那么输出电压实际上要高得多,因为拉高输出的机制是负载电阻,而不是输出三极管。
如果我们设计一个二极管补偿电路 (见图 7-1),二极管 D1 的正向电压 (典型值 0.7V)将会使输出低电压上升,在 5V CMOS 输入得到 1.1V 至1.2V 的低电压。它安全地处于 5V CMOS 输入的低输入电压阈值之下。输出高电压由上拉电阻和连至3.3V 电源的二极管 D2 确定。这使得输出高电压大约比 3.3V 电源高 0.7V,也就是 4.0 到 4.1V,很安全地在 5V CMOS 输入阈值 (3.5V)之上。
注: 为了使电路工作正常,上拉电阻必须显著小于 5V CMOS 输入的输入电阻,从而避免由于输入端电阻分压器效应而导致的输出电压下降。上拉电阻还必须足够大,从而确保加载在 3.3V 输出上的电流在器件规范之内。
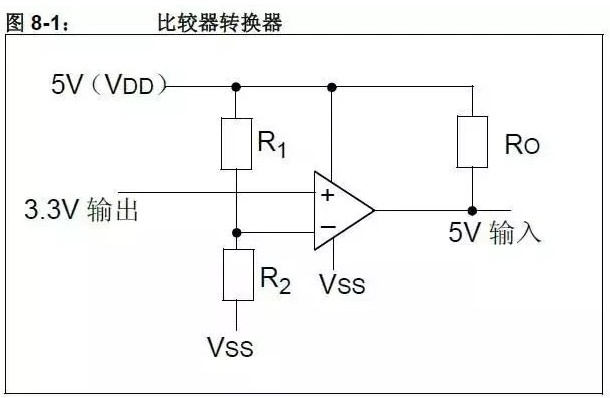
技巧八:3.3V→5V使用电压比较器比较器的基本工作如下:
• 反相 (-)输入电压大于同相 (+)输入电压时,比较器输出切换到 Vss。
• 同相 (+)输入端电压大于反相 (-)输入电压时,比较器输出为高电平。
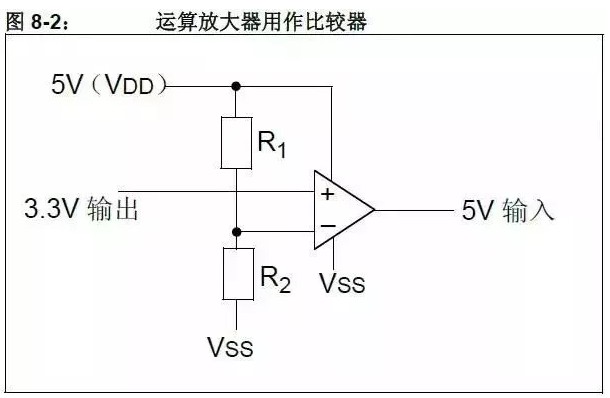
为了保持 3.3V 输出的极性, 3.3V 输出必须连接到比较器的同相输入端。比较器的反相输入连接到由 R1 和 R2 确定的参考电压处,如图 8-1 所示。
计算 R1 和 R2
R1 和 R2 之比取决于输入信号的逻辑电平。对于3.3V 输出,反相电压应该置于VOL 与VOH之间的中点电压。对于 LVCMOS 输出,中点电压为:
如果 R1 和 R2 的逻辑电平关系如下,
若 R2 取值为 1K,则 R1 为 1.8K。
经过适当连接后的运算放大器可以用作比较器,以将 3.3V 输入信号转换为 5V 输出信号。这是利用了比较器的特性,即:根据 “反相”输入与 “同相”输入之间的压差幅值,比较器迫使输出为高(VDD)或低 (Vss)电平。
注: 要使运算放大器在 5V 供电下正常工作,输出必须具有轨到轨驱动能力。







 /5
/5 


文章评论(0条评论)
登录后参与讨论