
PID是一个经典的控制律,被广泛应用于各种控制系统中。PID控制器可以用模拟电路来实现,也可以用数字算法来实现。实际应用中,PI控制相对于PD或PID控制用的更多一些。
<?xml:namespace prefix = o ns = "urn:schemas-microsoft-com:office:office" />
下图为一个采用运放来实现的PI控制器电路:
<?xml:namespace prefix = v ns = "urn:schemas-microsoft-com:vml" />
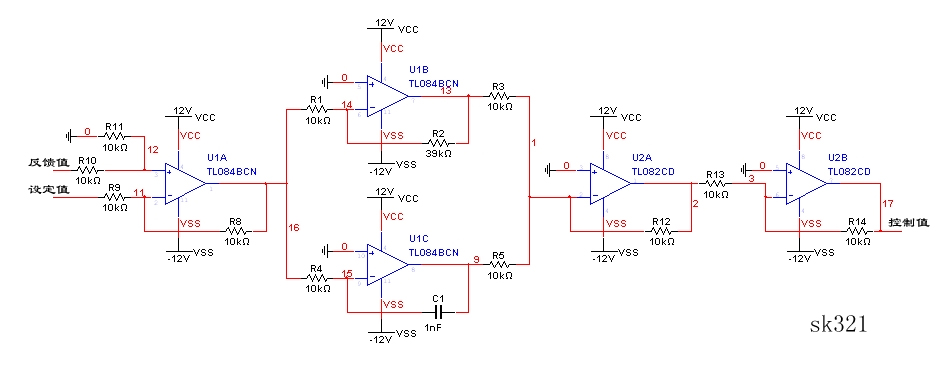
U<?xml:namespace prefix = st1 ns = "urn:schemas-microsoft-com:office:smarttags" />1A部分是比例为1的差分电路,此电路输入为反馈值和设定值输出为它们之间的偏差。
U1B部分是一个比例电路,比例系数为R2/R1 。
U1C部分是一个积分电路,积分系数为1/(R4 * C1) 。
U2A与U2B部分是一个加法电路,输出为控制值。
比例控制可以实现对偏差的快速响应,积分控制可以消除静差。将比例与积分控制结合起来可以在消除静差的同时加快对偏差的响应。
采用上述电路设计了一个电流控制器,实现电流输出值对电流设定值的跟踪。当仅采用积分控制时,波形如下(红色为设定值,橙色为输出值):
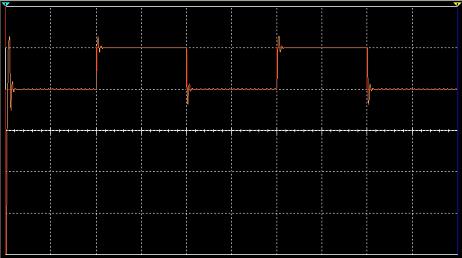
X轴单位为1ms

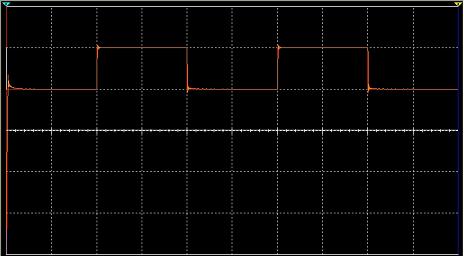
X轴单位为10us
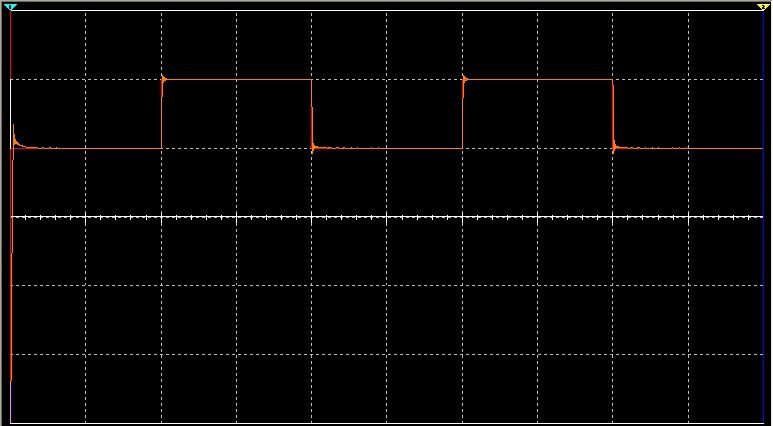
当采用比例积分控制时,波形如下:
X轴单位为1ms

X轴单位为10us
由上可见,两种方法都可以消除静差,实现输出值对设定值的跟踪,不过相比于纯积分控制,比例积分控制的效果更好一些,超调量小,稳定时间短。



 /5
/5 






{kind=link}
{kind=link}
用户449234 2013-5-8 14:42
用户136158 2008-11-20 16:03