
移植过程基于 STM32 标准外设库,在库内提供的例程基础上,将 FreeRTOS 移植进去。
相关资源:
1.STM32 标准外设库 V3.5.0 ( 直接下载地址 http://www.st.com/st-web-ui/static/active/en/st_prod_software_internet/resource/technical/software/firmware/stsw-stm32054.zip )。
2.FreeRTOS V7.5.2 ( 直接下载地址 http://jaist.dl.sourceforge.net/project/freertos/FreeRTOS/V7.5.2/FreeRTOSV7.5.2.zip )。
3.FreeRTOS Real Time Kernel (RTOS) 最新版本下载地址( http://sourceforge.net/projects/freertos/files/ )。
4.STM32F10x standard peripheral library 最新相关信息地址( http://www.st.com/web/cn/catalog/tools/FM147/CL1794/SC961/SS1743/PF257890 )。
移植过程:
以下以 STM32F103VCT6 为例进行移植,其他型号类似。
解压 FreeRTOS,打开关于 STM32F103 的例程(Keil版本),目录“..\FreeRTOSV7.5.2\FreeRTOS\Demo\CORTEX_STM32F103_Keil”。
解压 STM32 标准外设库,进入工程模板目录“..\STM32F10x_StdPeriph_Lib_V3.5.0\Project”,复制“STM32F10x_StdPeriph_Template”并根据项目重命名。进入目录“..\STM32F10x_StdPeriph_Lib_V3.5.0\Project\ProjectRoot\MDK-ARM” 下打开工程文件,对应STM32F103VCT6,选择“STM3210E-EVAL”。
目录“..\STM32F10x_StdPeriph_Lib_V3.5.0\Project\ProjectRoot\” (以下用..\ProjectRoot\表示)下新建“FreeRTOS”文件夹,拷贝Source(直接copy FreeRTOS源码Source目录)、Common(直接copy FreeRTOS源码\demo\Common目录)到”..\ProjectRoot\FreeRTOS\”下。
在Source/portable目录下,保留RVDS和MemMang目录,其余删除。复制 <FreeRTOS目录>\Demo\CORTEX_STM32F103_Keil\FreeRTOSConfig.h 到 ..\ProjectRoot\ 下。
在 MDK-ARM 中进行设置:
Target options ->Device中,选择STM32F103VC。
Target options -> C/C++ 中 Preprocessor Symbols 中 Include path 设定头文件路径:
..\
..\..\..\Libraries\CMSIS\CM3\CoreSupport
..\..\..\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x
..\..\..\Libraries\STM32F10x_StdPeriph_Driver\inc
..\..\..\Utilities\STM32_EVAL
..\..\..\Utilities\STM32_EVAL\Common
..\..\..\Utilities\STM32_EVAL\STM3210E_EVAL
..\FreeRTOS\Source\include
..\FreeRTOS\Source\portable\RVDS\ARM_CM3
..\FreeRTOS\Common\include
复制 Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x\startup\arm\startup_stm32f10x_hd.s 至 ..\ProjectRoot\ 。若使用其他容量器件,请自行选择对应的startup files。
参照 FreeRTOS 中的 STM32F10x.s 修改startup_stm32f10x_hd.s
在 __heap_limit 区段添加:
IMPORT xPortPendSVHandler
IMPORT xPortSysTickHandler
IMPORT vPortSVCHandler
;IMPORT vUARTInterruptHandler
;IMPORT vTimer2IntHandler
后两个不要添加,因为这不是 FreeRTOS 核心代码,是他demo用到的。
__Vectors区段中断向量表,将SVCall Handler、PendSV_Handler、SysTick Handler更名,改由 RTOS 管理,这样 stm32f10x_it.c 就不会影响到这三个中断。后面相应的中断入口地址需要更改
DCD vPortSVCHandler ; SVCall Handler
...
DCD xPortPendSVHandler ; PendSV Handler
DCD xPortSysTickHandler ; SysTick Handler
两者还有一点小小的不同,复位时进入main函数之前的那段代码,新版本外设库的启动代码中,在进入main()函数之前执行函数SystemInit()初始化了时钟,这个根据目标板不同,注意此段代码。
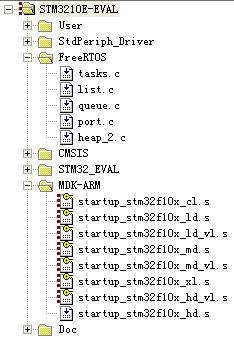
使用修改后的 startup_stm32f10x_hd.s 替换MDK-ARM组下的同名文件。参照 FreeRTOS 例程在 STM32 的外设库例程中加入 FreeRTOS 组,并加入文件: tasks.c、list.c、queue.c、port.c、heap_2.c,截图如下。
至此,设定完成,修改 main.c 文件,内容如下。需根据使用的开发板修改相关外设设置。因为 FreeRTOS 使用 configTOTAL_HEAP_SIZE 为 0x4400,IRAM的 SIZE 需超过 0x4400(17K),所以选择STM32要注意RAM大小是否满足。
/* main.c */
/* Standard includes. */
#include <stdio.h>
/* Scheduler includes. */
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "misc.h"
/* Library includes. */
#include "stm32f10x_it.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_usart.h"
#define LED0_ON() GPIO_ResetBits(GPIOA,GPIO_Pin_8);
#define LED0_OFF() GPIO_SetBits(GPIOA,GPIO_Pin_8);
#define LED0B() GPIOA->ODR ^= 0x0100;
#define LED1_ON() GPIO_ResetBits(GPIOD,GPIO_Pin_2);
#define LED1_OFF() GPIO_SetBits(GPIOD,GPIO_Pin_2);
#define LED1B() GPIOD->ODR ^= 0x04;
static void prvSetupHardware( void );
/* Two demo Tasks*/
static void vLEDTask( void *pvParameters );
static void vCOMMTask( void *pvParameters );
void Led_Init(void);
void Comm_Init(void);
int main( void )
{
prvSetupHardware();
xTaskCreate( vLEDTask, ( signed portCHAR * ) "LED", configMINIMAL_STACK_SIZE, NULL, tskIDLE_PRIORITY+3, NULL );
xTaskCreate( vCOMMTask, ( signed portCHAR * ) "COMM", configMINIMAL_STACK_SIZE, NULL, tskIDLE_PRIORITY+2, NULL );
/* Start the scheduler. */
vTaskStartScheduler();
return 0;
}
/*-----------------------------------------------------------*/
void vLEDTask( void *pvParameters )
{
Led_Init();
LED0_ON();
LED1_OFF()
for( ;; )
{
LED0B();
LED1B();
vTaskDelay( 100 / portTICK_RATE_MS);
}
}
void vCOMMTask( void *pvParameters )
{
Comm_Init();
for(;;)
{
USART_SendData(USART1, '@');
vTaskDelay(1000 / portTICK_RATE_MS);
}
}
/*-----------------------------------------------------------*/
static void prvSetupHardware( void )
{
SystemInit();
}
/*-----------------------------------------------------------*/
void Led_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOD, ENABLE );
/*LED0 @ PA8*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init( GPIOA, &GPIO_InitStructure );
/*LED0 @ PD2*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init( GPIOD, &GPIO_InitStructure );
}
void Comm_Init(void)
{
USART_InitTypeDef USART_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
/*UART1 TX @ PA9*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init( GPIOA, &GPIO_InitStructure );
/*UART1 RX @ PA10*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init( GPIOA, &GPIO_InitStructure );
/*UART1 Cfg.*/
USART_InitStructure.USART_BaudRate = 57600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_Init(USART1, &USART_InitStructure);
USART_ClearFlag(USART1, USART_FLAG_TC);
/*UART1 NIVC Cfg.*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART1, ENABLE);
}



 /5
/5 






文章评论(0条评论)
登录后参与讨论