
本驱动代码适用于ADI公司的AD779X系列ADC芯片,所有与硬件平台相关的代码都最大化的提取了出来,达到了最优化的移植性,本文档及代码旨在分享个人的开发工作,减少工程师们的开发周期,提高大家的工作效率。
测试时硬件平台我使用的是一块cortex-M3的单片机来和AD779X通信,具体型号为NXP公司的LPC1752单片机,原理图如下:
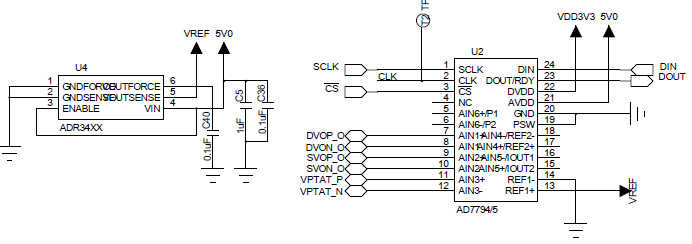
由上图可以看到AD779X的基准芯片采用ADI公司的ADR34XX系列芯片,AD779X与单片机的管脚连接有SCLK/CS/DI/DOUT共四个管脚,即AD779X的数字串行通信引脚。
A779X芯片的驱动代码整理后已经高度模块化,移植起来非常方便,整个移植过程只需要修改三个非常简单的地方即可使用,加快开发进度:
/***********PIN define**************************/
#define AD779x_DIN (1<<6)
#define AD779x_CS (1<<7)
#define AD779x_SCLK (1<<8)
#define AD779x_DOUTRDY (1<<10)
/********************************************************
*FUNCTION:Set pin function on MCU
**********************************************************/
void McuGpioSet(void)
/*******************************************************
*FUNCTION: AD779X PIN state set
*PARAMETER: PIN---serial pin on AD779X,may nex value:
* AD779X_DIN/AD779X_CS/AD779X_SCLK/AD779X_DOUTRDY
* Data---set value:0/1
*******************************************************/
void AD779x_PIN_SET(unsigned int PIN, unsigned char Data)
{
if(Data)
LPC_GPIO2->FIOSET |= PIN;
else
LPC_GPIO2->FIOCLR |=PIN;
}
/******************************************************
*FUNCITON:AD779X PIN STATE READ
*PARAMETER:PIN---serial pin,may next value:
* AD779X_DOUTRDY
*******************************************************/
unsigned char AD779X_PIN_READ(unsigned int PIN)
{
unsigned char VarDat;
if(LPC_GPIO2->FIOPIN & PIN)
VarDat=1;
else
VarDat=0;
return VarDat;
}
从上面描述可以看出,芯片AD779X的移植非常简单高效,为项目开发节约时间,提高工作效率,一下为高度模块化的子模块函数,与平台无关,移植时不用修改:
/******************************************************
*FUNCTION: AD779X serial pin initial
*******************************************************/
void AD779xInitialization(void)
/*************************************************
*FUNCTION: Serial interface reset
*************************************************/
void AD779xSoftwareReset(void)
/**************************************************
*FUNCTION: write data in registers
*PARAMETER:RegisterAddress---register address,may next value:
* COMMUNICATIONS,
* IO,
* MODE,
* CONFIGURATION,
* OFFSET,
* FULLSCALE
* RegisterBuffer---register data buffer point
* CHIP---chip choose,may next value:
* AD7794
* AD7795
* AD7796
* AD7797
**************************************************/
void AD779xWriteRegister(unsigned char RegisterAddress, unsigned long int *RegisterBuffer,unsigned char CHIP)
/************************************************************************
*FUNCTION:read data from register
*PARAMETER:RegisterAddress---register address , may next value:
* STATUS,
* ID,
* MODE,
* CONFIGURATION,
* OFFSET,
* FULLSCALE,
* DATA
* RegisterBuffer---data buffer point
* CHIP---chip choose,may next value:
* AD7794
* AD7795
* AD7796
* AD7797
*************************************************************************/
void AD779xReadRegister(unsigned char RegisterAddress, unsigned long int *RegisterBuffer,unsigned char CHIP)
/**************************************************************************
*FUNCTION:Read result for single conversion mode
*PARAMETER: DataIndex---the sotre place in DataBuffer
* DataBuffer---data store buffer
* CHIP---which type,may next value:
* AD7792/AD7793/AD7794/AD7795/AD7796/AD7797
**************************************************************************/
void AD779xReadResultForSingleConversion(unsigned char DataIndex, unsigned long int *DataBuffer,unsigned char CHIP)
/**************************************************************************
*FUNCTION:Read result for continuous conversion mode
*PARAMETER: StartIndex---the first store place in DataBuffer
* NumberOfData---data numbers
* DataBuffer---data store buffer
* CHIP---which type,may next value:
* AD7792/AD7793/AD7794/AD7795/AD7796/AD7797
**************************************************************************/
void AD779xReadResultForContinuousConversion(unsigned char StartIndex, unsigned char NumberOfData, unsigned long int *DataBuffer,unsigned char CHIP)
/**************************************************************************
*FUNCTION:Read result for continuous read mode
*PARAMETER: StartIndex---the first store place in DataBuffer
* NumberOfData---data numbers
* DataBuffer---data store buffer
* CHIP---which type,may next value:
* AD7792/AD7793/AD7794/AD7795/AD7796/AD7797
**************************************************************************/
void AD779xReadResultForContinuousRead(unsigned char StartIndex, unsigned char NumberOfData, unsigned long int *DataBuffer,unsigned char CHIP)
/*************************************************************************
*FUNCITON:Exit continous read mode
*PARAMETER: CHIP---which type,may next value:
* AD7792/AD7793/AD7794/AD7795/AD7796/AD7797
**************************************************************************/
void AD779xExitContinuousRead(unsigned char CHIP)
以上为该芯片驱动代码所有的子模块函数,在主函数中就可以调用这些子函数配置寄存器和读取ADC的值,下面代码即使用连续转换方式(Continuous Conversion)读取通道2的数据,然后将读取的数据通过UART接口打印输出,该代码在实际的硬件平台调试通过:
/*********************************************************************************************************
** Function name: main
** Descriptions:
** input parameters: 无
** output parameters: 无
** Returned value: 无
*********************************************************************************************************/
int main (void)
{
SystemInit(); /*MCU system initial*/
uart0Init (); /*uart initial*/
printf("General Platform v1.0!\n");
myDelay(1000);
AD779xInitialization();
AD779xSoftwareReset();
NopDely(100*50);
// read ID register
AD779xRegisters[COMMUNICATIONS]=WRITE_ENABLE|READ|RS_ID|CREAD_DISABLE;
AD779xWriteRegister(COMMUNICATIONS, AD779xRegisters,AD7794);
AD779xReadRegister(ID, AD779xRegisters,AD7794);
printf("RESET ID REGISTER=0x%04X\n",AD779xRegisters[ID]);
// read STATUS register
AD779xRegisters[COMMUNICATIONS]=WRITE_ENABLE|READ|RS_STATUS|CREAD_DISABLE;
AD779xWriteRegister(COMMUNICATIONS, AD779xRegisters,AD7794);
AD779xReadRegister(STATUS, AD779xRegisters,AD7794);
printf("RESET STATUS REGISTER=0x%04X\n",AD779xRegisters[STATUS]);
//WRITE MODE REGISTER
AD779xRegisters[COMMUNICATIONS]=WRITE_ENABLE|WRITE|RS_MODE|CREAD_DISABLE;
AD779xWriteRegister(COMMUNICATIONS, AD779xRegisters,AD7794);
AD779xRegisters[MODE]=MD_CONTINUOUS_CONVERSION|PSW_ENABLE|AMP_CM_ENABLE|CLK_INTERNAL_OUTPUT_ENABLE|CHOP_DISABLE|FILTER_UPDATE_RATE_242;
AD779xWriteRegister(MODE, AD779xRegisters,AD7794);
//WRITE CONFIGURATION
AD779xRegisters[COMMUNICATIONS]=WRITE_ENABLE|WRITE|RS_CONFIGURATION|CREAD_DISABLE;
AD779xWriteRegister(COMMUNICATIONS, AD779xRegisters,AD7794);
AD779xRegisters[CONFIGURATION]=VBIAS_DISABLE|BO_DISABLE|BIPOLAR|BOOST_DISABLE|GAIN_1|REFSEL_EXTERNAL_REF1|REF_DETECT_DIASBLE|BUF_ENABLE|CHANNEL_AIN2;
AD779xWriteRegister(CONFIGURATION, AD779xRegisters,AD7794);
while(1)
{
AD779xReadResultForContinuousConversion(0, 1, AD779xData,AD7794);
printf("convertion data1:0x%03X,data2:0x%03X\n",AD779xData[0],AD779xData[1]);
myDelay(1000);
}
}
http://item.taobao.com/item.htm?id=43307575672;


 /5
/5 






用户370614 2015-1-23 15:12
原创测试通过,很好用,移植方便