
激光雷达(Light Detection And Ranging,简称"LiDAR")测 量 , 是 一 种 集 激 光 、 GPS(全 球 定 位 系 统)和 IMU (InertialMeasurement Unit,惯性测量装置)三种技术于一身的系统,用于获得数据并生成精确的DEM(数字高程模型)。这三种技术的结合,可以高度准确地定位激光束打在物体上的光斑,测距精度可达厘米级,激光雷达最大的优势就是精准和快速、高效作业。
激光雷达当前被广泛用于无人驾驶汽车和机器人领域,被誉为广义机器人的“眼睛”,是一种通过发射激光来测量物体与传感器之间精确距离的主动测量装置。
激光雷达通过激光器和探测器组成的收发阵列,结合光束扫描,可以对广义机器人所处环境进行实时感知,获取周围物体的精确距离及轮廓信息,以实现避障功能;同时结合预先采集的高精地图,机器人在环境中通过激光雷达的定位精度可达厘米量级,以实现自主导航。

激光雷达可以高精度、高准确度地获取目标的距离、速度等信息或者实现目标成像。激光雷达工作过原理:激光通过扫描器单元形成光束角度偏转,光束与目标作用形成反射/散射的回波。当接收端工作时,可产生原路返回的回波信号光子到达接收器,接收端通过光电探测器形成信号接收,经过信号处理得到目标的距离、速度等信息或实现三维成像。
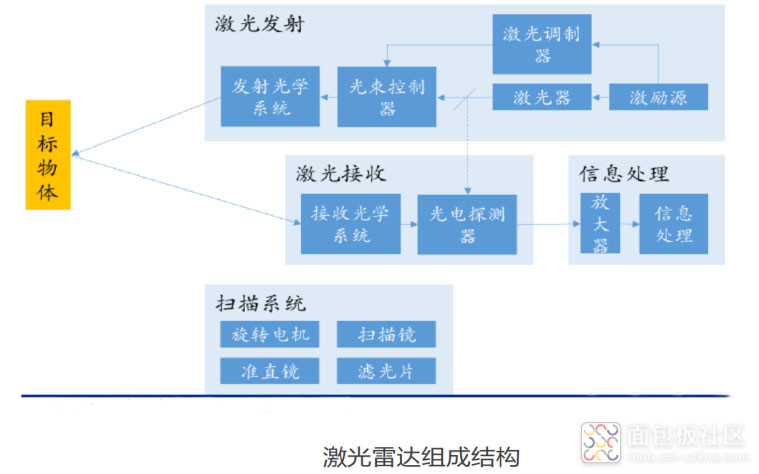
激光雷达由激光发射、激光接收、信息处理、扫描系统四大基础系统构成,这四大系统相互协作,进而短时间内获取大量的位置点信息,并根据这些信息实现三维建模。其中激光发射器通过光束控制器控制发射激光的方向和线数,最后通过发射光学系统,将激光发射至目标物体;激光接收系统为接收光学系统,光电探测器接受目标物体反射回来的激光,产生接收信号;信息处理系统接收信号经过放大处理和数模转换,经由信息处理模块计算,获取目标表面形态、物理属性等特性,最终建立物体模型;扫描系统以稳定的转速旋转起来,实现对所在平面的扫描,并产生实时的平面图信息。
在激光雷达中,发射端是价值量最高、壁垒最高的环节之一。在发射端中,随着国内产业链崛起以及产业的整体技术路线调整,905nm VCSEL激光芯片等产品有望在市场实现突破。此外,1550nm光源也具备独特优势,与主流的905nm形成错位竞争,未来随着FMCW测距路线的逐步发展,预计其份额还有进一步增长的空间。发射端的“心脏”就是光源,光源的选择制约因素主要有性能、成本、产业链成熟度、人眼安全四大要素。光源选择完之后,需要解决光源校准、温漂、无热化三大问题。那么为何有905nm与1550nm两条路线,而不是其他波长?这首先受到激光传播窗口的限制。大气吸收谱限制了哪些激光波长能够在空气中使用,比如300nm以下的短波会被臭氧吸收,1微米以上的红外波长又经常会被水蒸气吸收,所以激光器通常只能在少数特定窗口工作,如下图白色背景部分(可以注意到很大一部分与可见光波长重合)。白色窗口中又有一大段是可见光,如果直接采用可见光又会对人眼产生视觉干扰,所以剩余的传播窗口是有限的。图中四条红线从左到右分别代表865nm、905nm、1310nm、1550nm波长,均处于白色窗口中,都能在空气中正常工作。
最终选择哪个波长还与现存的产业链成熟度有关。1550nm光纤激光器是光通信领域应用最广的光源之一,而905则与消费电子共用产业链(手机上的3D ToF传感器通常使用940nm光源,与905基本属于同种半导体激光器,可以共用GaAs材料体系),所以都有一定的发展基础。1550nm的波长允许的峰值功率高,更具有探测优势,而905nm波长使用的材料体系则更有成本优势。同时由于905nm更接近可见光,视网膜对其更敏感,液态水对其吸收也更少,因此这种光线更容易直达视网膜。相比而言,1550nm容易被水吸收,因此在抵达视网膜之前已经被玻璃体等前部结构进行一轮吸收,抵达视网膜的较少。同时1550nm光折射率更大,即便是抵达视网膜,也不容易聚焦成很小的光点,能量相对分散,进一步减小了损伤。综上所述,在考虑了人眼限制的因素上,1550nm路线的探测距离优势明显,而受到材料限制,905nm路线的成本优势也同样明显,因此二者构成错位竞争。预计1550nm激光雷达将主要用于以安全性为核心卖点的车辆(如沃尔沃等)、价位和品牌定位较为高档的车辆(如蔚来、奔驰、上汽飞凡R等)、重卡(刹车距离较长,奔驰重卡采用1550nm激光雷达)等特殊定位的车辆。其余车辆受限于成本,则更适合采用905nm激光雷达。
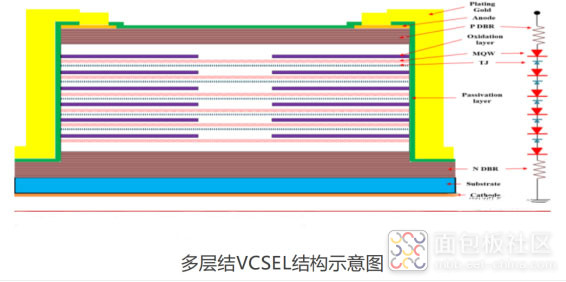
虽然目前激光雷达领域的光源还是以EEL为主,但在905nm波长上,随着多结工艺提升了发光功率,VCSEL替换EEL的趋势越来越明显,国内激光芯片企业迎来发展机遇。VCSEL取代EEL的首要原因是成本,由于VCSEL是上表面发光而不是侧面发光, 不需要在侧面进行太多加工,只需要按照正常的半导体加工工艺批量处理即可。而EEL是侧面发光,所以在形成晶圆后还需要进行切割,分别对每个激光器的侧表面进行处理、镀膜,无法按照现有半导体工艺来一次性处理整个晶圆的激光器,成本较高。按照Yole的统计,EEL的后道处理工序成本比VCSEL高了一倍以上。如果再考虑给EEL增加DBR,就需要在EEL侧面沉积多层晶体,成本会进一步提高。VCSEL取代EEL的第二大原因是因为过去VCSEL发光功率低的问题已经被新的“多结”工艺所解决。半导体激光器本质上作为一种二极管,也是PN结构成的,所谓多结就是多个PN结。在最初始的LED和激光二极管中,通常只用1个PN结进行发光。而随后为了加大功率,人们开始将一个半导体激光器制作成多层PN结的结构,每一个PN结都能够发光,这就大大增加了发光强度。根据刘恒等发布的《用于激光雷达的高性能多结VCSEL芯片的研究》,下图49是一个6层结的VCSEL,图中“MQW”所指向的区域就是发光层,总共有6个,相当于6个PN结,电流从上到下依次流经6个PN结,就能让6个PN结同时发光,相当于6个串联的激光二极管。
近年来结数的增多让905NM的VCSEL发光功率迅速增大,快速接近EEL。此前由于VCSEL发展较晚,而且更多用于消费电子,对大功率没有需求,所以此前大多都是单层结的,功率较小。而激光雷达的发展对大功率激光器提出了需求, 做出多层结的VCSEL并不存在原理上的困难,只是需要时间进行工艺开发,因此随着近年来VCSEL结数的不断增加,最后一块短板已经被补齐,在激光雷达领域替代EEL已经完全可行。
发射端如果想要保证持续可靠的工作,还需要注意的一点就是尽量避免发热的影响。如果发热得不到有效控制,则温度上升,不仅会导致激光器温漂,还会导致其他元件变形,对光路产生影响。由于VCSEL功耗等原因需要进行无热化设计。所谓无热化,主要是指补偿设计,当温度发生改变,光学器件发生形变,但系统中不同部件的形变效果几乎恰好抵消,使得光学系统的效果几乎不受温度影响。
在激光雷达中,通常主要的发热部件就是芯片和激光器,针对芯片,通常采用传导热能量快、热阻低的陶瓷材料封装,辅以导热胶或导热硅脂填充进行充分散热,以免热量影响自身以及其他部件工作实现良好的散热。针对大功率激光器主要是采用热沉进行散热,热沉(heat sink)通常是指一些能够持续吸收热量或者将热量导走而又保持温度稳定的物体,比如导热率可达200W/M.K的氮化铝陶瓷基板。以高效导热著称的金刚石热沉其热导率更是氮化铝的50~100倍。陶瓷材料与硅片相近的热膨胀系数更其适合于解决芯片封装中的热应力失配问题。多年来斯利通一直致力于陶瓷新型材料的电路板制造研发,目前可批量生产的陶瓷电路板厚度涵括0.1-8.0mm范围,实现线宽线距40um的微电子技术。
在自动化驾驶的 5 级标准中,L3 级标准下的 ADAS 高级辅助驾驶市场与L4、L5 级标准下的无人驾驶市场都对激光雷达技术产品拥有着较高的需求,随着中国自动驾驶领域的政策和规范的不断成熟,激光雷达行业也将迎来广阔的发展空间。
作者: 斯利通陶瓷电路板, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-3876914.html
版权声明:本文为博主原创,未经本人允许,禁止转载!



 /5
/5 






文章评论(0条评论)
登录后参与讨论