
配套 OV2640摄像头:200W像素通用24P摄像头
具有200万像素(1632x1232像素),其体积小、工作电压低,提供单片UXGA摄像和影像处理器的所有功能。通过SCCB总线控制,可以输出整帧、子采样、取窗口等方式的各种分辨率10位采样数据。该产品UXGA图像最高达到15帧/秒。用户可以完全控制图像质量、数据格式和传输方式。所有图像处理功能过程包括伽玛曲线、白平衡、饱和度、色度等都可以通过SCCB接口编程。OmmiVision图像传感器应用独有的传感器技术,通过减少或消除光学或电子缺陷如固定图案噪声、托尾、浮散等,提高图像质量,得到清晰的稳定的彩色图像。
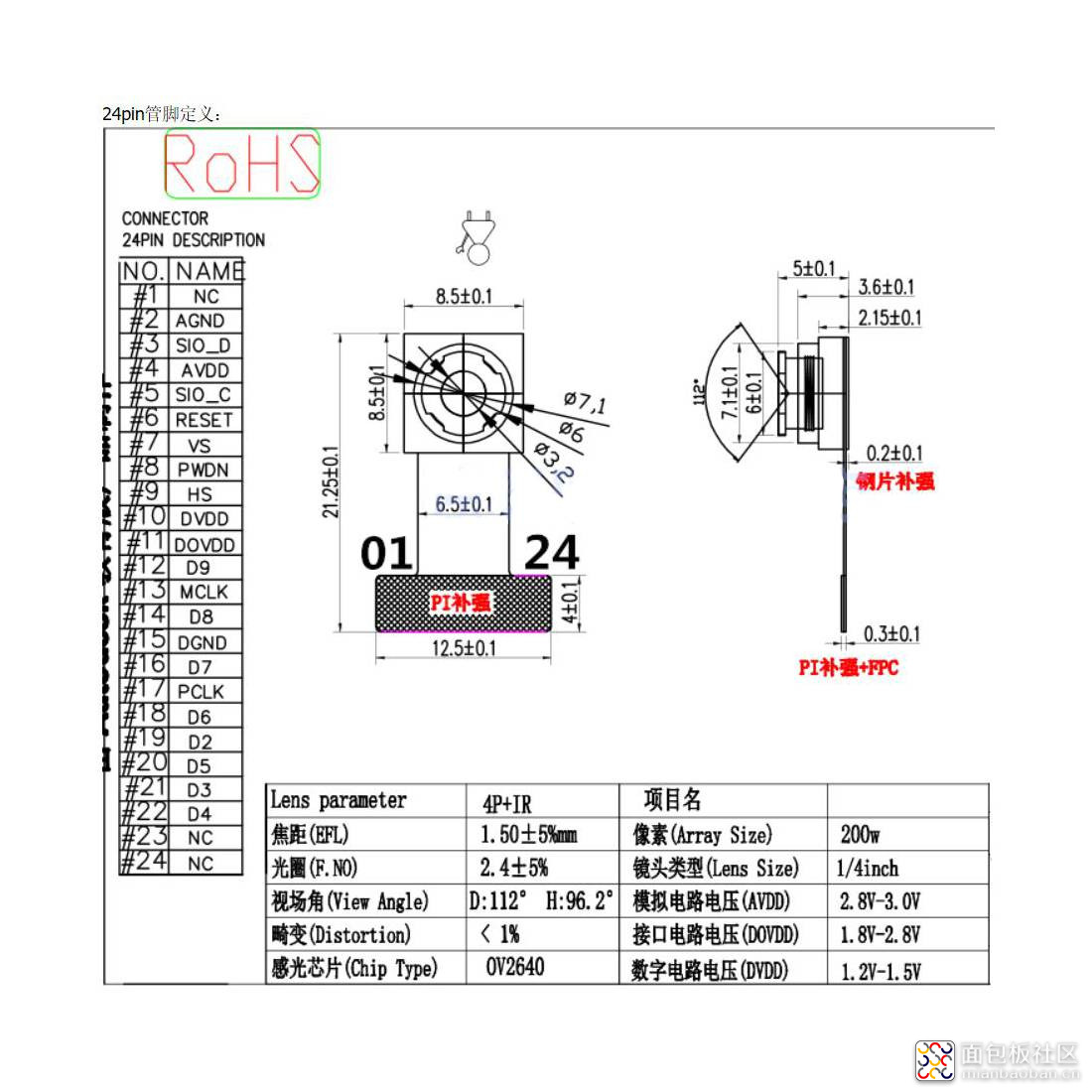

OV2640主要参数
可以支持定制FPC长度,镜头角度(70-160度)可以支持定制FPC长度,镜头角度(70-160度)
感光阵列1632x1232 最大格式UXGA
IO电压1.7V-3.3V 模拟电压2.5-3.0v(内部LDO给核供电1.2V)
功耗工作TBD 休眠<20μA
温度操作-30℃到70℃
稳定工作0℃到50℃
输出格式(8位)YUV/YCbCr4:2:2 RGB565/555/444 GRB4:2:2 Raw RGB Data
光学尺寸1/4"
视场角70度
最大贞率15fps SXGA
灵敏度1.3V/(Lux-sec)
信噪比40 dB
动态范围50 dB
浏览模式逐行
电子曝光1行到1247行
像素面积2.2μm x 2.2μm
暗电流15mV/s at 60℃
工作电流40mA
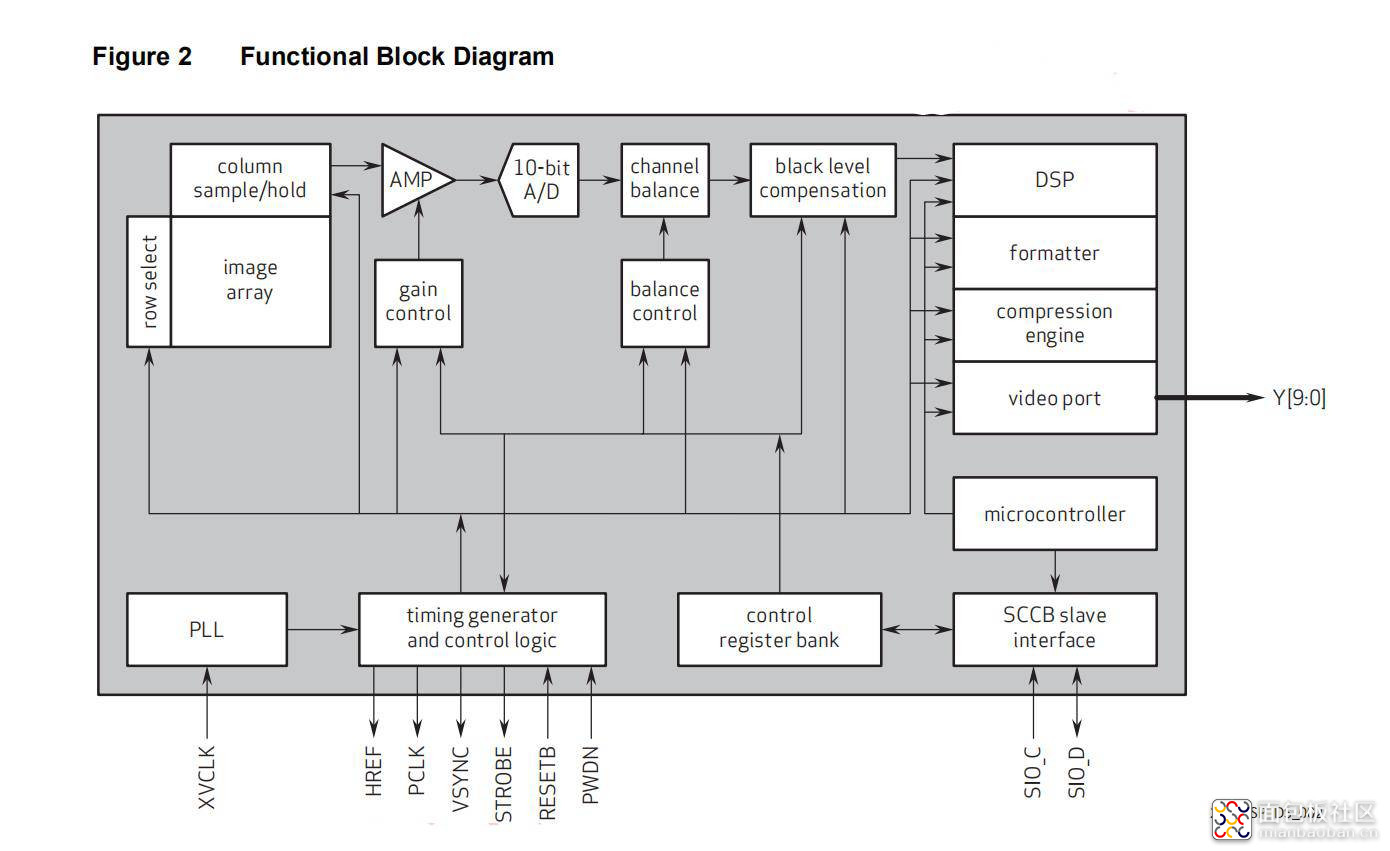
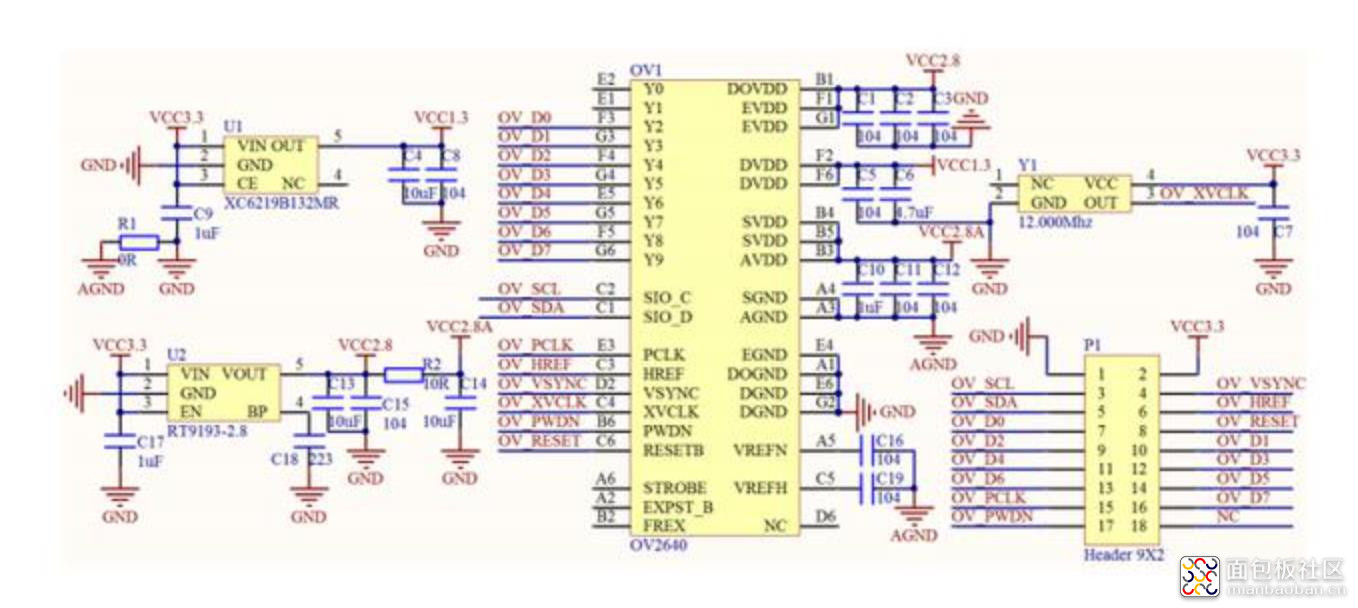
OV2640内部方块图 |

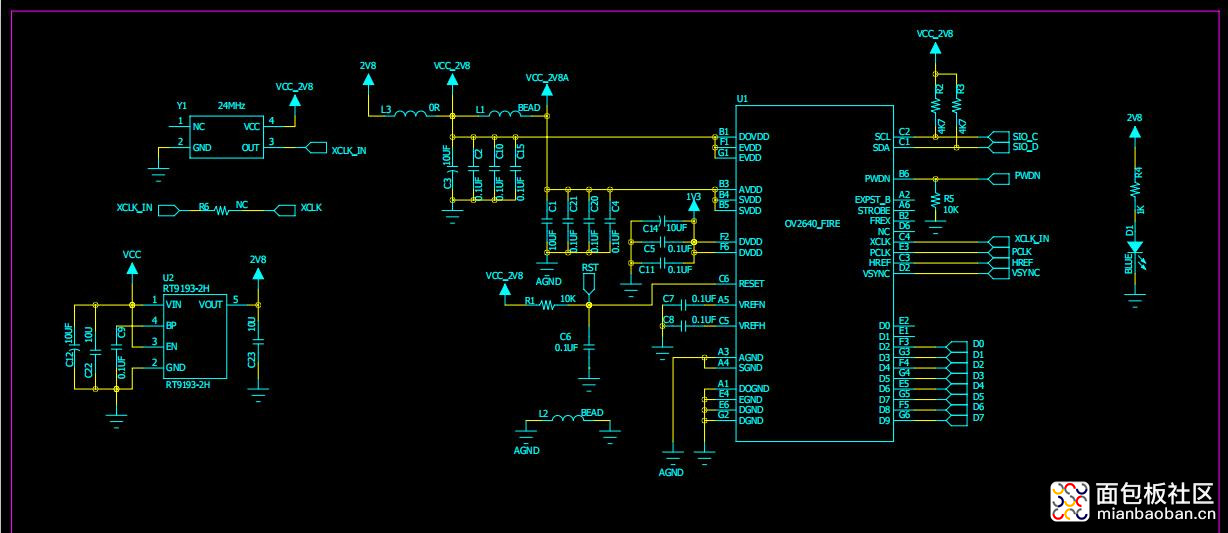
| 摄像头电原理图 |
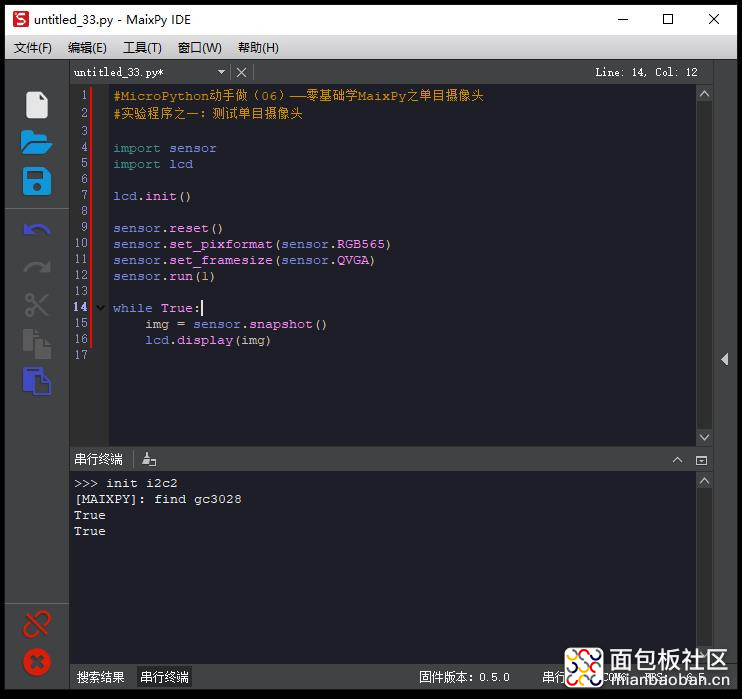
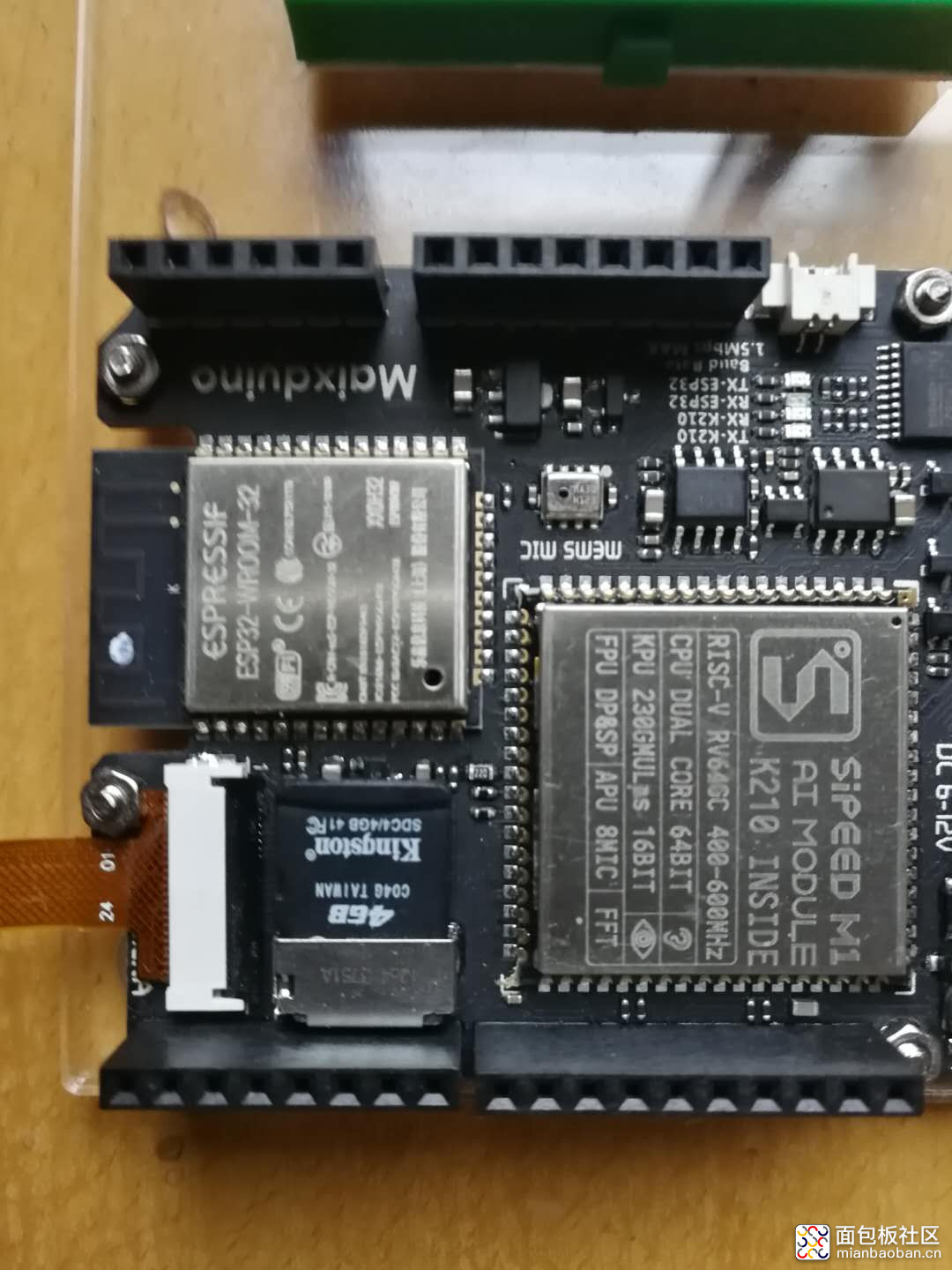
#MicroPython动手做(06)——零基础学MaixPy之单目摄像头
#实验程序之一:测试单目摄像头

| 单目摄像头sensor驱动 传感器模块,进行摄像头配置及图像抓取等,用于控制开发板摄像头完成摄像任务。 1. 初始化单目摄像头 重置并初始化单目摄像头 sensor.reset([freq=24000000, set_regs=True, dual_buff=False]) 参数 freq: 设置摄像头时钟频率,频率越高帧率越高,但是画质可能更差。默认 24MHz, 如果摄像头有彩色斑点(ov7740),可以适当调低比如 20MHz set_regs: 允许程序写摄像头寄存器,默认为 True。 如果需要自定义复位序列,可以设置为False,然后使用sensor.__write_reg(addr, value) 函数自定义写寄存器序列 dual_buff: 允许使用双缓冲,会增高帧率,但是内存占用也会增加(大约为384KiB) 2. 捕获图像控制 启动或关闭捕获图像功能(默认经过复位,设置帧大小,设置像素格式后会自动启动摄像头,不调用run(1)也会开始采集图像) sensor.run(enable) 参数 enable: 1 表示开启 0 表示停止 返回值 return: 返回 1 3. 设置帧大小 用于设置摄像头输出帧大小,k210最大支持VGA格式,大于VGA将无法获取图像 MaixPy开发板配置的屏幕是320*240分辨率,推荐设置为QVGA格式 sensor.set_framesize(framesize[, set_regs=True]) 参数 framesize: 帧大小 set_regs: 允许程序写摄像头寄存器,默认为 True。 如果需要自定义设置帧大小的序列,可以设置为False,然后使用sensor.__write_reg(addr, value) 函数自定义写寄存器序列 返回值 True : 设置成功 False: 设置错误 |
#MicroPython动手做(06)——零基础学MaixPy之单目摄像头
#测试程序之二:尝试拍一张照片
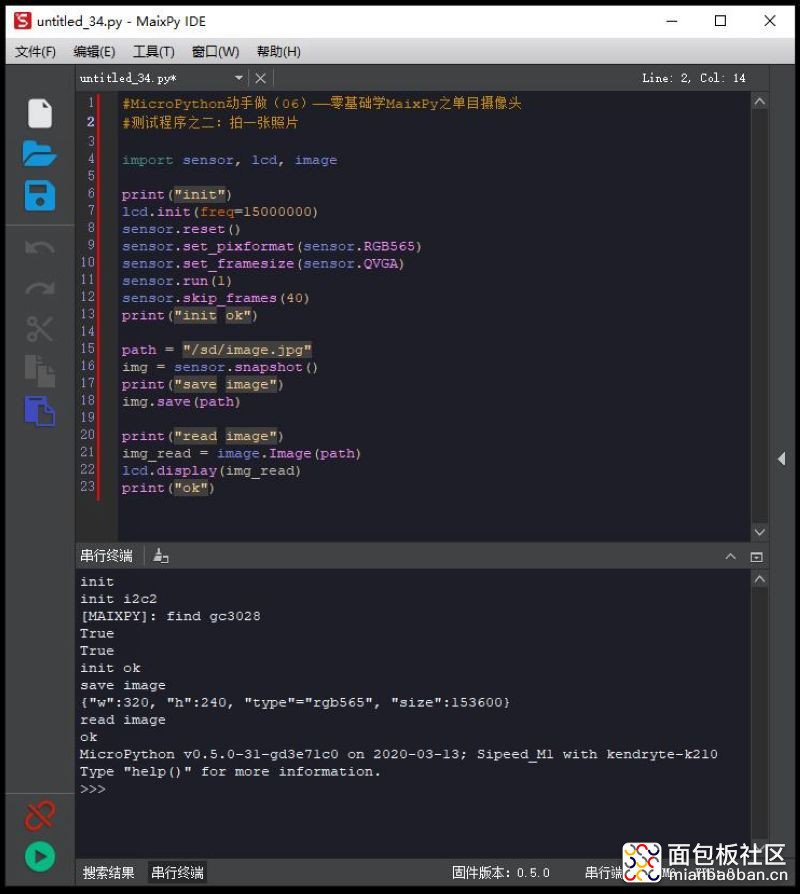
串口输出
init
init i2c2
[MAIXPY]: find gc3028
True
True
init ok
save image
{"w":320, "h":240, "type"="rgb565", "size":153600}
read image
ok
MicroPython v0.5.0-31-gd3e71c0 on 2020-03-13; Sipeed_M1 with kendryte-k210

单目摄像头sensor驱动
传感器模块,进行摄像头配置及图像抓取等,用于控制开发板摄像头完成摄像任务。
4. 设置帧格式
用于设置摄像头输出格式
MaixPy开发板配置的屏幕使用的是RGB565,推荐设置为RGB565格式
sensor.set_pixformat(format[, set_regs=True])
参数
format: 帧格式
set_regs: 允许程序写摄像头寄存器,默认为 True。 如果需要自定义设置像素格式的序列,可以设置为False,然后使用sensor.__write_reg(addr, value) 函数自定义写寄存器序列
可选的帧格式有GRAYSCALE, RGB565, YUV422
返回值
True : 设置成功
False: 设置错误
5. 图像捕捉控制
图像捕捉功能控制
sensor.run(enable)
参数
enable: 1 表示开始抓取图像 0 表示停止抓取图像
返回值
True : 设置成功
False: 设置错误
6. 拍摄图像
使用摄像头拍摄一张照片
sensor.snapshot()
参数
无
返回值
img: 返回的图像对象
| #MicroPython动手做(06)——零基础学MaixPy之单目摄像头 #测试程序之三:录制一段视频(30秒) |
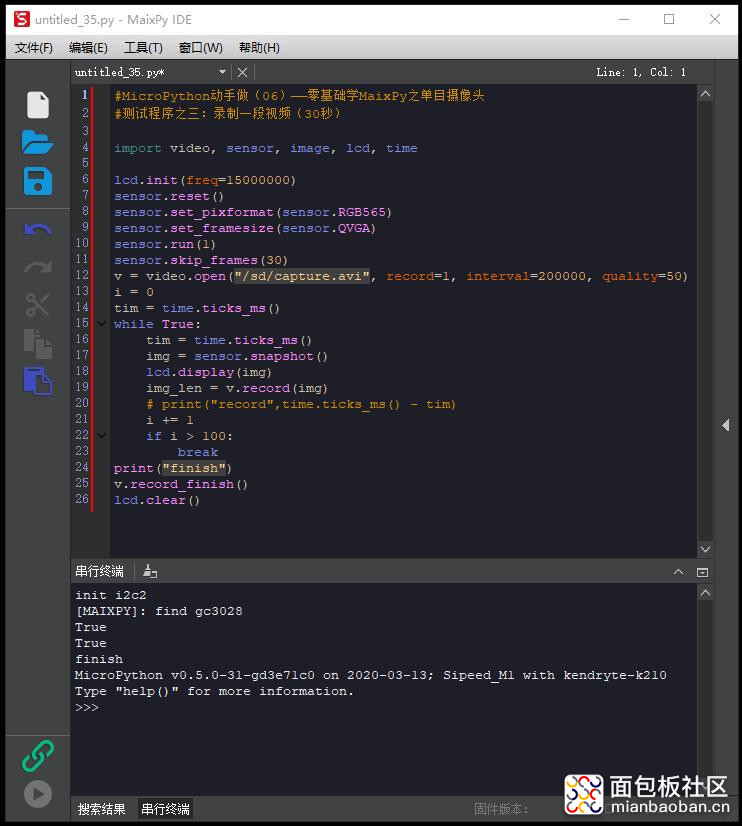
串口输出
>>> init i2c2
[MAIXPY]: find gc3028
True
True
finish
MicroPython v0.5.0-31-gd3e71c0 on 2020-03-13; Sipeed_M1 with kendryte-k210
Maixduino开发板上的micro-SD卡插槽,我插入的是4G

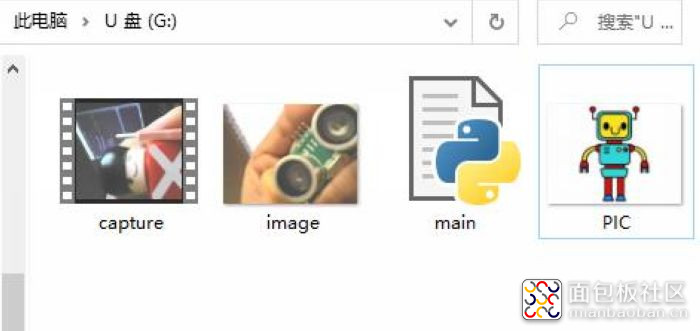
在电脑上打开micro-SD卡,里面有程序二拍的照片,及程序三录制的一小段视频(实际只有25秒)
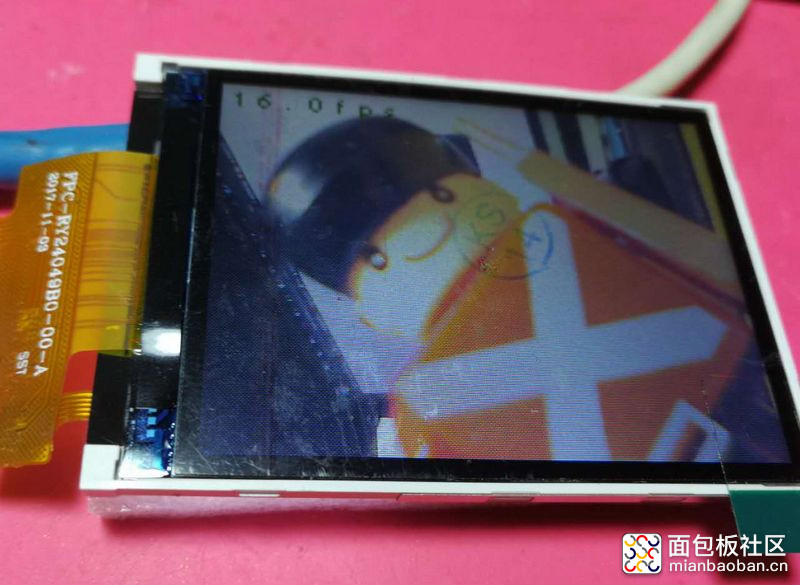
录制视频的截图
单目摄像头sensor驱动
传感器模块,进行摄像头配置及图像抓取等,用于控制开发板摄像头完成摄像任务。
7. 摄像头控制
关闭摄像头/切换摄像头
sensor.shutdown(enable/select)
参数
单目摄像头
enable: True 表示开启摄像头 False 表示关闭摄像头
双目摄像头
select: 通过写入 0 或 1 来切换摄像头
返回值
无
8. 跳帧
跳过指定帧数或者跳过指定时间内的图像,让相机图像在改变相机设置后稳定下来
sensor.skip_frames([n,time])
参数
n: 跳过 n 帧图像
time: 跳过指定时间,单位为ms
若 n 和 time 皆未指定,该方法跳过300毫秒的帧;若二者皆指定,该方法会跳过 n 数量的帧,但将在 time 毫秒后返回
返回值
无
9. 分辨率宽度
获取摄像头分辨率宽度
sensor.width()
参数
无
返回值
int类型的摄像头分辨率宽度
10. 分辨率高度
获取摄像头分辨率高度
sensor.height()
参数
无
返回值
int类型的摄像头分辨率高度
11. 获取帧缓冲
获取当前帧缓冲区
sensor.get_fb()
参数
无
返回值
image类型的对象
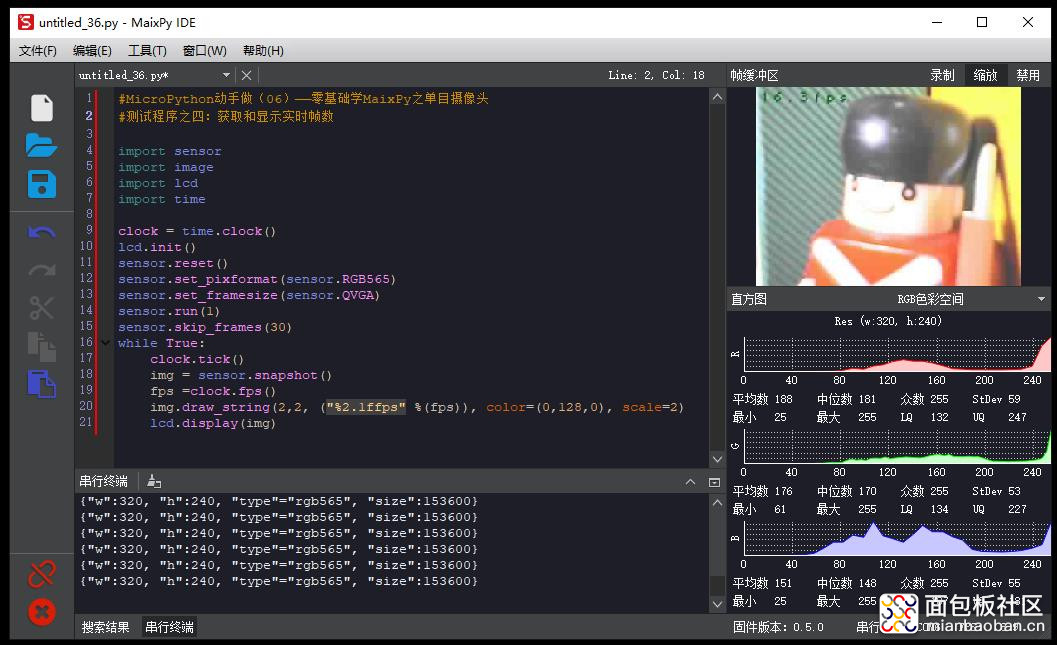
| #MicroPython动手做(06)——零基础学MaixPy之单目摄像头 #测试程序之四:获取和显示实时帧数 #MicroPython动手做(06)——零基础学MaixPy之单目摄像头 复制代码
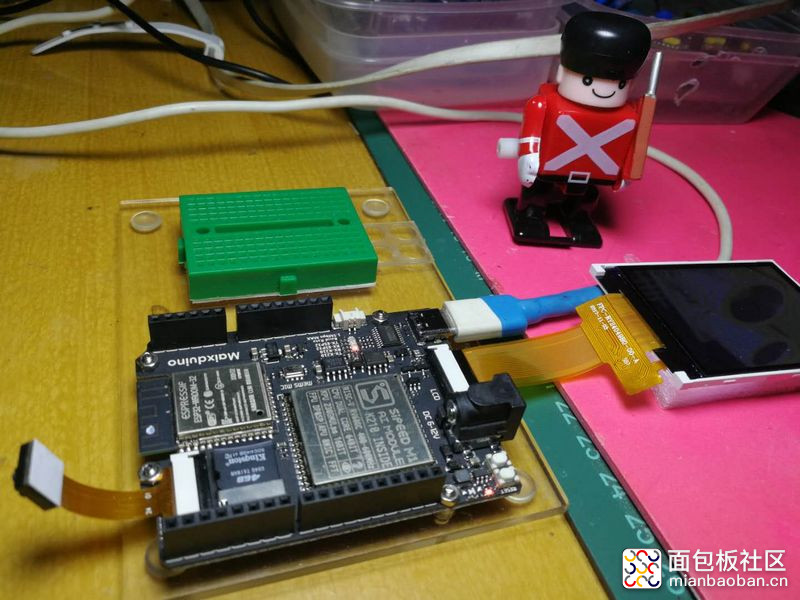
单目摄像头sensor驱动 传感器模块,进行摄像头配置及图像抓取等,用于控制开发板摄像头完成摄像任务。 12. 获取ID 获取当前摄像头ID sensor.get_id() 参数 无 返回值 int类型的ID 13. 设置彩条测试模式 将摄像头设置为彩条测试模式 开启彩条测试模式后,摄像头会输出一彩条图像,常用来检测摄像机总线是否连接正确。 sensor.set_colorbar(enable) 参数 enable: 1 表示开启彩条测试模式 0 表示关闭彩条测试模式 返回值 无 14. 设置对比度 设置摄像头对比度 sensor.set_contrast(contrast) 参数 constrast: 摄像头对比度,范围为[-2,+2] 返回值 True : 设置成功 False: 设置错误 15. 设置亮度 设置摄像头亮度 sensor.set_brightness(brightness) 参数 constrast: 摄像头亮度,范围为[-2,+2] 返回值 True : 设置成功 False: 设置错误 16. 设置饱和度 设置摄像头饱和度 sensor.set_saturation(saturation) 参数 constrast: 摄像头饱和度,范围为[-2,+2] 返回值 True : 设置成功 False: 设置错误 视频:k210开发板采集图像,显示实时帧数(20秒) 灯光下的实验场景
单目摄像头sensor驱动 |
作者: 雕爷学编程, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-3894459.html
版权声明:本文为博主原创,未经本人允许,禁止转载!


 /1
/1 






文章评论(0条评论)
登录后参与讨论