
传统上,信号路径的隔离控制是由电磁继电器(EMR)提供的。本应用说明的目的是提出一种替代方案,固态继电器(SSR),并描述SSR的一些使用方式。一个SSR,顾名思义,是完全由固态器件组成的——在其运行过程中不发生任何机械运动。控制侧的LED将电气输入转换为光功率。在接触侧,光功率被转换回一个电信号,为开关驱动器供电,以为固态开关供电。在某些类型的SSR中,来自被开关的电路的一小部分功率被用于操作固态开关(e。g.晶闸管),但在其他的开关操作的电源完全来自光信号(e。g.HSSR-8200)使触点完全被动。
ssr和emr的一些相对优点可以在图1的示意图比较中看到。在控制方面,电磁辐射呈现的感应载荷可能受到磁干扰或辐射磁干扰;磁场的崩溃,当它被断电时,可能会产生需要抑制的瞬态电压。SSR控制只是一个LED,既不受磁干扰,也不引起磁干扰;而在开启或关闭时的低电压变化很少需要瞬态抑制。虽然电磁场通常可以通过电压和电流的极性来供电,但SSR需要在所示方向上的电流。用桥式整流器可以很容易地实现SSR的任意极性操作。
在接触侧,SSR可分为三大类:仅交流、直流和双向(交流或直流)。双向类型,如EMR,在关闭时可以在任何一个方向上传递电流,并且在打开时可以承受任一极性的电压。在某些类型的EMR中,单个控制电路可以操作超过一组触点,这些触点可以形成a(常开),形成B(通常封闭),形式C(双掷),或这些选项的任何组合。大多数SSRs提供形式的A接触,但形式B和形式C也可以制作。此外,在大多数SSRs中,单个控制只操作一组触点,但通过简单的电路可以很容易地将SSRs的多功能操作实现,如下图所示。
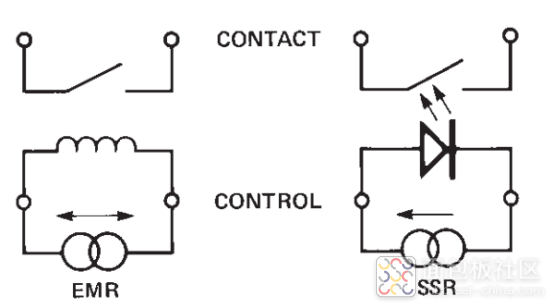
图1。EMR和SSR的示意图比较。
ssr和emr之间的重要区别不是图上的,而是功能上的。在ssr中,没有机械运动,因此它们比电子病历有四个明显的优势:
1.无接触反弹,关闭始终保持清洁
2.冲击、振动或安装位置没有问题
3.没有限制操作次数的磨损机制
4.没有最低接触“润湿”电流
在EMRs,接触反弹问题可以用汞湿接触来解决,但这可能会对相对于重力的安装方向施加限制;ssr 可以在任何位置安装和操作。在严重冲击和振动的环境中,SSRs提供清洁的操作——除非机械滥用造成物理损坏。ssr的一个特别重要的优势是无限数量的操作。EMRs通常只对大约10亿次操作可靠地运行;如果每秒1000次操作,EMRs只能持续两周,然后应该更换。
特征总结
SSR的HSSR-8200的一些特性可以根据图2中的电路图和图3中的近似等效电路来描述。首先,注意结构是8针DIP尺寸,但当然只需要四个针。Avago使用四个角销1、4、5和8,使处理更容易,特别是通过机械自动插入。
接下来,考虑控制侧。极性的定义如图2所示。HSSR-8200通电(触点闭合)与如果最低至1.0 mA在vf只有略高于1.0V(一些ssr可能有更高的如果和vf所需的东西在某些应用中,可能希望以更高的电流运行,但由于电流随电压呈指数变化,这将只需要稍高的电压。在较高电流下的操作会使触点快速关闭。并减少r(上)轻微的;它还增加了偏移电压,VO (OS).断电SSR(触点打开)需要较低的电流,但更可靠的保证是使正向电压小于0.8 V。触点从打开到关闭的完全开关需要的电压变化通常小于0.4 V,而且很少大于0。9 V.

图2。HSSR-8200电路图。
在通电条件下,来自LED的光辐射被光电二极管阵列转换为足够的电压和电流来操作开关驱动器(图。2),也可以驱动两个fet的门源电极。这里需要注意的是,操作开关的所有电源都来自光电二极管阵列——由开关操作的电路不需要任何电源。接触侧看起来很复杂,但在大多数应用中,可以忽略
部分或所有无关的电路元件。因此,值得考虑一下图3中的等效电路,
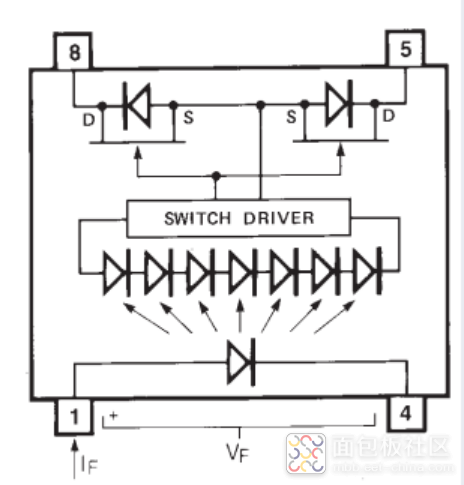
图3。HSSR-8200的近似等效电路。
并检查数据表的值,看看它们是否确实可以被忽略。在许多情况下的价值r(上)是如此的低r(关闭)如此高以至于可以被忽略,其他参数可能也是如此。对于HSSR-8200,r(上)是否小于0.00025 MΩ和r(关闭)超过50,000 MΩ;因此,在具有少兆欧阻抗的电路中,它们可以分别被视为短的和开的,误差只有百万分之一。对于具有可变阻抗的电路,其比值为r(关闭)向r(上)是重要的,因为它与阻抗比,相对于误差可能被忽略。
HSSR-8200相对于其他ssr和机械继电器是通过其高运行速度,低偏置电压VO (OS),低偏移电流io(关闭),且失电容值较小。在要切换的信号很低的地方,伺服(操作系统)和io从…落下应该考虑。随着电压施加到开放触点上,所产生的电流的一部分io从…落下流入罗从…落下,部分是接触电路中两个二极管中的任何一个的反向偏置。当LED打开,开关关闭时,开关的大小伺服(操作系统)最初上升,然后随着来自LED的热量通过接触电路扩散,并在很大程度上平衡热电偶电压。的数据表的值VO (OS)在峰值,发生在控制LED通电后几秒钟,极性是一致的。
尽管c(关闭)是非常小的,在1000赫兹的电抗吗c(关闭)低于100 MΩ;因此,要切换具有频率甚至低于音频范围的信号,可能需要采用特殊的技术来处理c(关闭).这种技术可能就像降低电路阻抗一样简单,但也可能需要A型和B型开关的串联分流组合,或应用中和作用。
另一个考虑因素是SSR触点可以使用的电路电流的范围。在低端,有漏电流,io(关闭).在高端,电流可能只受到最大额定值的限制io(上),(HSSR-8200为40mA),也可能受到线性度的限制r(上).请注意,在图2中,接触由两个反串联的fet组成,以提供双向对称。在每个场效应晶体管上都有一个源-漏极二极管。 因为每个场效应晶体管的一个通道电阻近似等于一半r(上),当接触电流上升到通过触点的电压降约为两个二极管下降的水平时,该二极管开始打开。在这个水平以上,动态电阻的值大约是它在低于这个水平的接触电流值的一半。
在断电状态下,HSSR-8200的开放触点可以承受高达200 V的任何一种极性的电压。在某些应用中,这些接触点可能暴露在有害的高瞬态电压下。FET漏极可能要求提供外部装置以保护它们免受这种瞬态的影响。同样,在通电条件下,在不损坏闭合开关的情况下,允许的电流流量是有限制的。
在控制侧和接触侧之间是不可避免的寄生现象日本里-O和CI-O如图3所示。价值超过100万兆欧姆的,日本里-O通常可以忽略。CI- O对于相对于接触电路的大瞬态电压,通常可以忽略。具有足够振幅的瞬态可以耦合足够的电荷通过CI-O造成接触暂时不正常状态。然而,正如在数据表中所示,控制-接触瞬态拒绝的值如此之高,因此极不可能发生这种幅度的共模瞬态。即使不存在较大的瞬态,也可能存在控制电路和接触电路在其共同点之间有线电压的情况。在115V,60Hz时,1.0 pF的电容耦合约50 nA的电流,在1 MΩ负载下将产生50 mV r毫秒的“哼”电压。
应用建议
在这里建议的安排中,只显示了接触及其预期的闭合序列。稍后,将详细描述如何获得这些序列的细节。信号E1. ..N字在图4中,它们可能来自于级别太低而不能允许直接处理的来源;也就是说,它们可能需要放大或阻抗转换。A/D转换器和放大器是昂贵的,所以多路复用的一个动机是使放大器的成本在多个源之间共享。另一个,也许更重要的考虑是,希望对几个信号施加完全相同的增益,以便放大水平的比率V1...Vn将与未放大的比例有关,E1. ..EN.
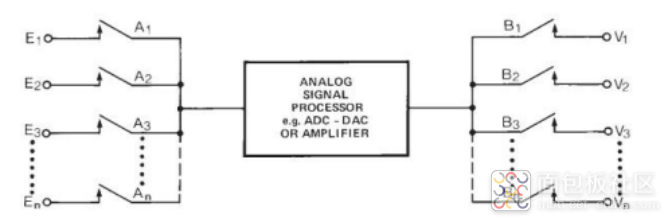
图4。多路复用和复用。
图5a显示了一种利用了封闭触点的低偏移量和可忽略的非线性的配置。如果不在高或低信号电平上遇到严重的错误,这种安排可以在40年的范围内执行反相增益选择。另一种可能性如图5b所示;这里的闭合触点的开启-电阻甚至比图5a的排列方式更不重要。如果操作速度不重要,则SSR可以在比通常应用程序所需要的要低得多的控制电流下操作。这在图6中所示的电池供电报警系统等应用程序中很有用。在这里,报警电路,这将是一个相对沉重的漏极的电池,是断开的,直到传感器电路通电的SSR的控制电路。此时,当触点开始闭合时,控制电路电流增强,并锁定报警。
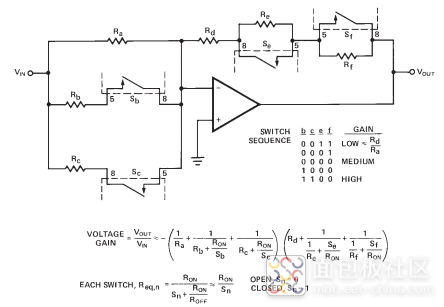
图5a。反相放大器的增益开关。

图5b。非反相放大器的增益开关。
控制驱动电路的建议
运行HSSR-8200控制装置需要在通电(接通)状态下的正向电流才能关闭触点;对于断电(关闭)状态,正向电压必须小于0.8 V。R(ON)为1。0 mA,并且在较高的正向电流下运行并不会大大降低R(ON )。另一方面,增加控制电流增加偏移电压-几乎线性。
在控制电流 大于1.0 mA的情况下运行,唯一的好处是转弯开启时间优于线性减少;关机时间也有轻微的减少。图7显示了一个用于获得所需的接通电流和关闭电压的简单电路。所使用的逻辑系列几乎可以是任何东西.
任何一个TTL逻辑家族,开放收集器或图腾柱,都将在如图所示的安排中工作。CMOS也是如此,前提是电流下沉能力足够。r1设置正向电流的水平,独立于r2。R2的目的是绕过足够低的电压的高泄漏电流,以确保OFF电压小于0.8 V。在某些正向电压和正向电流情况下,不需要R2;一些逻辑输出有内部的上拉电路,能够满足关闭电压的要求,而没有由R2提供的外部上拉。对于开放集电器TTL输出,R2总是需要的,因为HSSR-8200实际上可以用几微安的正向电流运行(尽管在更高的接通电阻下)。在计算该驱动电路和其他驱动电路的电阻值时,正向电压和正向电流之间关系的有用近似值为正向电压和正向电流之间关系的有用近似值为:
V = Va +(dV/dT)*(25 - T) + Vb*log (I) V为伏特,T为摄氏度,I为毫安
其中,1.1
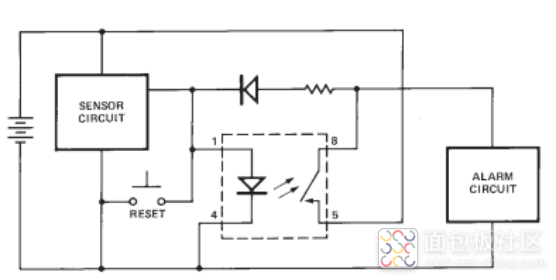
图6。低控制电流的电池保护器。
图7中的电路基本上是一种串联驱动类型,因为有功电流是由一个与LED串联的设备来切换的。稍后将看到,这种类型的驱动电路在实现其他设计目标方面具有很大的灵活性。它可以与具有主动上拉(图腾柱)输出或开放收集器输出的TTL一起使用。如果开放的集电极TTL可用于驱动控制,那么一个更简单的替代方案是图8中的分流开关。它只需要一个电阻器,并且逻辑低电压不影响接通电流。逻辑低电压天生满足关闭电压要求。
如前所述,接通时间受到正向电流水平的影响。随着正向电流的增加,接通时间变短。然而,可能不希望以高的稳态正向电流工作,因为这将增加由于从LED控制器转移到接触侧的热量而产生的偏移电压。在需要快速打开但低偏移的情况下,可以使用峰值电路,如图9所示。当逻辑输出高,r2保证通过LED的电流很小,使电容器完全放电。然后当逻辑输出变低时,通过R1和R3的电流激增,直到电容器被充电到R1的电压,之后稳态电流仅由R1设置。因此,峰值允许快速接通以及低稳态电流(接触电路中的低偏移)。
关闭触点需要为开关驱动器电路中的电容进行充电(图2)。这种电荷是来自光电二极管阵列的时间集成光电流,并转化为一定数量的电荷,必须通过LED(在200纳米库仑的量级)。该电荷量由峰值电容器的值和在R1上的电压设定。因此,当需要其他(更高)峰值电流值时,无需改变电容器的值;只需要降低R3的值,并确保逻辑输出能够降低更高的电流。

图7。逻辑驱动控制电路。
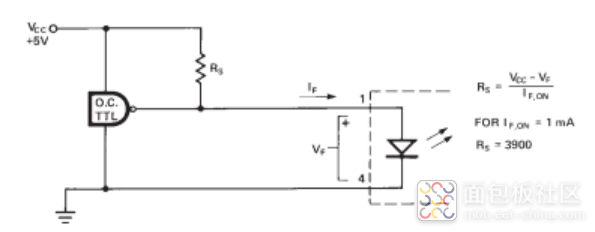
图8。分流驱动控制。

图9。达到峰值,可缩短打开时间。
图10显示了串联分流驱动器的组合。列驱动器进行串联切换,行驱动器在分流模式下运行。当启用输入高时,选择所需的行和列(高true),但选定的LED保持关闭,直到启用变低。这一规定是必要的,以确保“中断前”操作的接触。由于关闭时间超过打开时间,必须有一个“死”时间为0.2 ms或更多,以防止重叠接触闭合。R1和R2的值按照图7和图9的电路的描述进行选择,如果需要,R3,C的峰值可以与每个R1并行添加。
只有当要有选择地操作大量的开关时,图10中的矩阵排列才值得考虑。为了从较少的开关中进行选择,图11显示了一个更简单的电路,其中使用了解码器/解复用器IC电路。电阻器R1和R2的值的计算方法与图7和图9中的电路不相同。这里的原理是选择一个比值R1/R2,使当74154输出高时,通过LED的正向电压小于0.8 V,然后建立这个比值,电阻值足够小,以便在74154输出低时允许足够的正向电流。电阻值的实际选择最容易的方法是首先在不等式中选择边界较大的r1,以提供一个广泛的r2选择范围,以拟合双侧不等式。如果需要在任何一条或所有三条阳极母线上达到峰值,则可以添加R3、C峰值电路,而不影响R1和R2值的选择。峰值电路可以连接到VCC线上或接地线上。一个重要的问题是74154解码器的启用输入的操作。这两个值都必须很低,以使输出(由地址选择)变低。建议在地址选择后,在0.2 ms或更多的时间间隔内,至少增加一个启用输入,以防止重叠的接触闭合。

图10。矩阵驱动控制电路。
过电压保护
在某些应用中,触点有可能暴露在破坏性的高压下。说明了这样一种情况,其中使用HSSR-8200从几个输入中选择一组输入,并将该集合呈现给信号处理器。差动输入(H和L)由处理器驱动的保护装置(G)屏蔽。当打开时,HSSR-8200的触点可以承受200 V,正极或负极。所示的故障装置提供了防止超过200 V造成的损坏的保护。这些器件可以是通用半导体TransZorbsTM或GE/RCAMOVsTM(金属氧化物可变电阻器)。当它们之间的电压超过设计水平时,它们会分解并严重传导。如符号所示,击穿电压具有任意一个极性,但也有单极性器件。TransZorbs可以承受更多的打击,但mov有较低的分流电容。这两种类型都会失败“短”,因此即使操作失败,保护也不会失败。串联电阻必须足够大,以将浪涌电流限制为为保护装置规定的值。


 /5
/5 






文章评论(0条评论)
登录后参与讨论