
本实验通过TL3568-PlusTEB教学实验箱修改机械臂不同舵机的角度,增加延迟时间,从而做到机械臂跳舞的效果。
ROS(机器人操作系统)
ROS(机器人操作系统),是专为机器人软件开发所设计出来的一套电脑操作系统架构。
ROS是一个开源的元级操作系统(后操作系统),提供类似于操作系统的服务,包括硬件抽象描述、底层驱动程序管理、共用功能的执行、程序间消息传递、程序发行包管理,它也提供一些工具和库用于获取、建立、编写和执行多机融合的程序。
机械臂通过ROS机器人操控系统,简化了6自由度串行总线舵机复杂运动控制,可实现机械臂正解、反解、运动规划、机械碰撞检测、夹取分拣等功能。
虚拟机(Virtual Machine)
机械臂由虚拟机生成控制决策,STM32控制器驱动机械臂。
虚拟机(Virtual Machine)是指通过软件模拟的具有完整硬件系统功能的、运行在一个完全隔离环境中的完整计算机系统。

在计算机中创建虚拟机时,需要将实体机的部分硬盘和内存容量作为虚拟机的硬盘和内存容量。
每个虚拟机都有独立的CMOS、硬盘和操作系统,可以像使用实体机一样对虚拟机进行操作。
机械臂自由度
机械手自由度,是指传送机构机械手的运动灵活性。通常把传送机构的运动称为传送机构的自由度。
人从手指到肩部共有27个自由度。而如将机械手的手臂也制成这样多的自由度,既困难又不必要。

从力学的角度分析,物件在空间只有6个自由度。因此为抓取和传送在空间不同位置和方位物件,传送机构也应具有6个自由度。
实验程序流程
1、创建机械臂对象
2、机械臂循环跳舞:让舵机复位归中
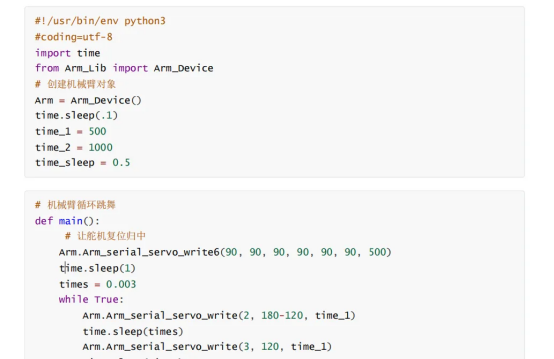
如图所示



 /1
/1 







文章评论(0条评论)
登录后参与讨论