
电机将电能转换成机械能,步进电机将电脉冲转换成特定的旋转运动。每个脉冲所产生的运动是精确的,并可重复,这就是步进电机为什么在定位应用中如此有效的原因。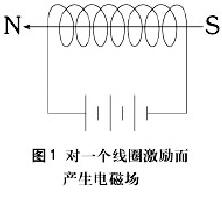
永磁步进电机包括一个永磁转子、线圈绕组和导磁定子。激励一个线圈绕组将产生一个电磁场,分为北极和南极,见图1所示。定子产生的磁场使转子转动到与定子磁场对直。通过改变定子线圈的通电顺序可使电机转子产生连续的旋转运动。
图2显示了一个两相电机的典型的步进顺序。在第1步中,两相定子的A相通电,因异性相吸,其磁场将转子固定在图示位置。当A相关闭、B相通电时,转子顺时针旋转90°。在第3步中,B相关闭、A相通电,但极性与第1步相反,这促使转子再次旋转90°。在第4步中,A相关闭、B相通电,极性与第2步相反。重复该顺序促使转子按90°的步距角顺时针旋转。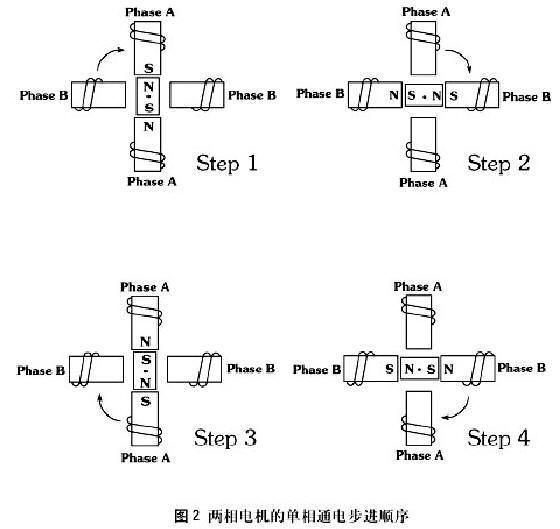
半步步进
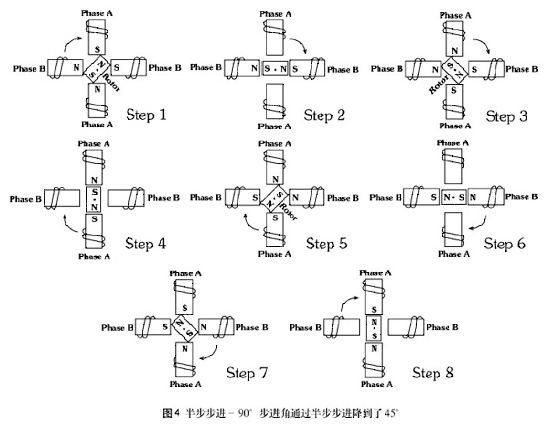
电机也可在转换相位之间插入一个关闭状态而走“半步”。这将步进电机的整个步距角一分为二。例如,一个90°的步进电机将每半步移动45°,见图4。但是,与“两相通电”相比,半步进通常导致15%~30%的力矩损失(取决于步进速率)。在每交换半步的过程中,由于其中一个绕组没有通电,所以作用在转子上的电磁力要小,造成了力矩的净损失。
双极性绕组
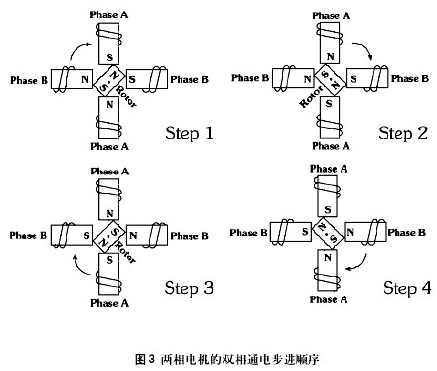
双相激励介绍了利用一种“双极性线圈绕组”的方法。每相用一个绕组,通过将绕组中电流反向,电磁极性被反向。典型的两相双极驱动的输出步骤在电气原理图和图5中的步进顺序中进一步阐述。按图所示,转换只利用绕组简单地改变电流的方向,就能改变该组的极性。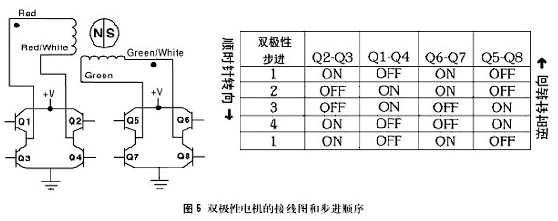
单极性绕组
另一常用绕组是单极性绕组。其一个电极上有两个绕组,这种联接方式为当一个绕组通电时,产生一个北极磁场;另一个绕组通电,则产生一个南极磁场。因为从驱动器到线圈的电流不会反向,所以可称其为单极绕组。该步进顺序见图6所示。该设计使得电子驱动器简单化。但是,与双极性绕组相比,其力矩大约少30%,因为励磁线圈仅被利用了一半。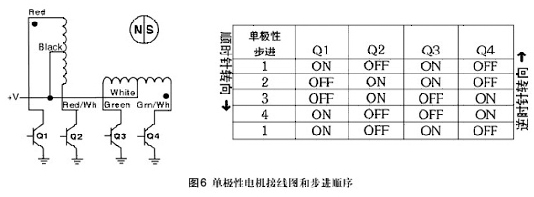
共振
由于电机是一个弹性体系统,所以步进电机有一个固有谐振频率。当步进速率等于电机的固有频率时,电机可能会产生听得见的噪音变化,同时振动增加。共振点将随应用场合和负载而变化,但共振点通常出现在70~120步/秒之间的某一位置。在严重情况下,电机在振荡点附近可能会失步。改变步进速率是避免系统中与共振有关的许多问题的最简单的方式。另外,半步或微步驱动通常也可以减少共振问题。当加减速时,要尽可能快地越过共振区。
力矩
一个特定的旋转步进电机所产生的力矩是下述参数的函数:
● 步进速率
● 通过绕组的电流
● 所使用的驱动器的种类(直线电机所产生的力也取决于这些因素。)
力矩是摩擦力矩(Tf)和惯性力矩(Ti)之和。
T=Tf+Ti
摩擦力矩(oz-in或g-cm)为所要求移动一个载荷的力(单位为oz或g)乘上用于驱动载荷的力杆臂(r)的长度(单位为了in或cm)(见图8所示)。
惯性力矩(Ti)为所要求用于加速负载(单位为:g-cm2)的力矩。
Ti="I"(ω/t)πθK
其中:I=惯量,单位:g-cm2
ω=步进速率,单位:步数/秒
t=时间,单位:秒
θ=步距角度,单位:度
K=常数:97.73
应该注意到的是:当电机的步进速率增加时,电机的反向电动势(EMF)也增加。其限制了电流,并导致可使用的输出力矩的减少。
选择适当的电机
为了选择适当的电机,必须考虑几种因素。是要求线性运动还是要求旋转运动?以下为选择一个电机时应考虑的一些基本要求的清单。这将有助于确定是否要使用一个直线电机,还是要使用一个旋转电机。
旋转电机 直线电机
要求多大力矩? 要求多大力?
工作周期是多少? 工作周期是多少?
所希望的步距角是多少? 所希望的步进增量是多少?
步进速率或转速(RPM)是多少? 步进速率或行程速度是多少?
双极性或单极性线圈? 双极性或单极性线圈?
线圈电压? 线圈电压?
定位力距或保持力矩要求? 断电时螺杆须保持位置或可反向移动?
是否有尺寸限制? 是否有尺寸限制?
所期望的寿命要求是多少? 所期望的寿命要求是多少?
工作环境温度是多少? 工作环境温度是多少?
滑动轴承或滚珠轴承? 固定轴或贯通轴式?
径向载荷和轴向载荷? 驱动器的类型?
驱动器的类型?
交流同步电机
步进电机也可在交流(AC)下运行。但是,其中一相必须通过一个适当选择的电容器而得电。在这种情况下,电机限制为仅有一个同步速度。例如,如果电源频率为60赫兹,则电源有120次反向或变更。通过电容器通电的相位也按照偏移时间顺序而产生相同数量的变更。电机已按相当于240步/秒的速率真正通电。对于1.8°的旋转电机,要求200个步长来完成一个旋转(200SPR)。这就成了72转/分(RPM)的同步电机。

对于直线电机,所产生的线性速度取决于电机每步的分辨率。例如,如果向0.001英寸/步的电机通60赫兹的电源,则所获得的速度为0.240英寸/秒(240步/秒乘0.001英寸/步)。
驱动器
步进电机的运行需要有一些外部的电气零件。这些零件通常有电源、逻辑程序器、开关元件和时钟脉冲源,以确定步进速率。许多商用驱动器已经将这些零件组合成了一个整体。一些基本的驱动器设备仅有末级功率级,而没有可以产生适当步进顺序的电子控制器。
双极性驱动方式
对于具有四根引线的两相双极性电机,这是非常普遍的驱动方式。在一个完整的驱动器/控制器中,电子元件交替地使每相电流反向。其步进顺序见图5所示。
单极性驱动方式
该驱动方式要求每相上具有一个中间抽头(6根引线)的电机。与使每相中的电流反向不同的是,该驱动只需将电流从每相中的一个线圈转换到另一个线圈(图6)。通过绕组的改变使电机内部的磁场转变方向。该方案用于简单驱动,但每次仅利用了绕组的一半。与相当的双极性电机相比,这使旋转电机产生的力矩或直线电机产生的力大约低了30%。
L/R驱动方式
这种类型的驱动也可称为恒压驱动。大多数的这类驱动器可以配置成运行双极性或单极性步进电机。L/R代表电感(L)与电阻(R)之间的电气关系。电机线圈阻抗与步进速率之比由这些参数所确定。L/R驱动器应将电源输出电压与电机线圈额定电压相匹配,以适应连续负载工作。许多已经公布的电机性能曲线是以施加在电机引线上满载额定电压为基础的。电源输出电压级别必须设置到足够高,以补偿驱动器电路内部的电压降失,以达到最佳的连续运行。
大多数步进电机的性能水平在短时工作制下可以通过增加所施加的电压来加以提高。这通常称为“过度驱动”电机。当过度驱动一个电机时,工作周期中必须有足够的定期断电时间(不施加电源),以防止电机温升超过允许范围。
斩波驱动方式
斩波驱动方式允许步进电机在较高的速度下维持比L/R驱动方式更大的力矩或力。斩波驱动器是一个恒定电流驱动器,通常为双极性类型。斩波驱动器是通过快速接通和关闭(断路)输出电源,以控制电机电流而得名的。对于该设置,可以使用低阻抗电机线圈和最大电源电压,此时,驱动器将传递最佳性能。作为一般原则,为获取最佳性能,电源和额定电机电压之间所推荐的比率为8:1。在本目录中作性能曲线时使用了8:1的比率。
微步驱动方式
许多双极性驱动器拥有微步进的功能。微步进是以电子方式将一个整步长分成较小的步长。例如,一个直线电机的一个步长为0.001英寸,将其驱动到每步具有10个微步,这样,一个微步将为0.0001英寸。微步有效地减少了电机的步进增量。但是,与一个全步长的精确度相比,每个微步的精确度具有更大的百分比误差。和全步长一样,微小步进的增量误差也是非累积的。在大部分情况下,微步驱动的目的是为了减弱或消除步进电机的低步振动。
疲劳/寿命
适当应用时,HSI的直线电机可提供多达2千万次的循环,HSI的旋转电机可提供长达25,000小时的运行。电机最终的疲劳和综合寿命由每个用户的具体应用情况决定。
下述定义对理解电机寿命和疲劳是重要的。
连续工作制:在额定电压下连续运行电机。
25%工作制:在L/R驱动上以双倍的额定电压运行电机,电机通电时间大约为25%。电机产生的输出比在额定电压下运行大约要多60%。注意,工作周期与施加在电机上的负载无关。
寿命:直线电机的寿命为电机能在指定的负载下运动,并维持步进精确度的循环次数。旋转电机的寿命为工作小时数。
一个周期:直线电机的一个周期包括伸出以及缩回到初始位置的整个动作。
对于如何选择适当的电机并确保其最长寿命,有一些通用的准则。基本上,如要在一个给定的系统中确定一个步进电机的性能,最好在“现场条件”下,或在紧密接近这些条件的场合中进行最终组装测试。
由于步进电机没有电刷所产生的磨损,所以其寿命通常超过了该系统中的其它机械零件。如果步进电机失效,则其可能与某些零件有关。轴承和导向螺杆/螺母接合处通常是要经受疲劳的首要零件(在直线电机中)。所要求的力矩或推力以及工作环境是影响这些电机零件的因素。
如果电机在其额定力矩或推力下,或接近其额定力矩或推力下运行,则其寿命将受到影响。HSI的测试表明电机寿命随工作负载的降低降低而呈指数增加。一般而言,电机应设计成在其最大负载能力的40%~60%下运行。一些环境因素,如高湿度、暴露于苛性化学制品中、大量的污垢/碎片以及热量,都会影响电机的寿命。组装中一些机械因素,如直线电机中轴的侧向负载或旋转电机中的不平衡负载等,也将对电机寿命造成不利影响。
如果在短时工作制下使用电机,并向电机施加过度的电压,则“通电”时间应保证其温升不超过电机的最大温升。如果电机没有足够的“断电”时间,将会产生太多的热量,以致绕组过热,最终导致电机失效。
设计一个能将这些因素降低到最小的系统将确保电机的最大寿命。将寿命最大化的第一步是选择一个安全系数为2或更大的电机。第二步是通过将侧向负载、不平衡的负载和冲击载荷降低到最小来保证系统具有良好的机械性能。该系统也应消散热量。对于有散热装置的电机或设备来说,周围的气流通常是主要的散热方式。如果系统中存在苛性化学品,则必须对电机和其它所有零件加以防护。最后,在“现场条件”下测试电机及其组件将确保应用的适当性。
如果遵守了这些准则,HSI直线电机将在广泛的领域内提供可靠的操作。如果您在设计上需要帮助,HSI的应用工程师将帮助您在我们的电机上获得最大的寿命和最佳的性能。
总结
多年来,步进电机一直被许多领域所使用,随着小型化、计算机控制和降低成本的趋势,“混合式”步进电机的使用正日益广泛。特别是近年来,直线电机的使用已经迅速地扩大,在许多领域都能发现这些精密、可靠的电机,包括血液分析仪和其它医疗仪器、舞台自动化照明、成像设备、HVAC设备、阀门控制、印刷设备、X-Y平台、集成芯片制造、检验和试验设备。这些颇具吸引力的技术便利大量零件不再需要,而且还削减了与组装、采购、库存等相关的费用。设计师所能想到的地方就是这些电机的用武之地。
术语
定位或剩余力矩:在没有电流通过绕组时,能使电机的输出轴旋转所需施加的力矩。
驱动器:一个通过控制外部电气零件来运行步进电机的装置。这包括电源、逻辑程序器、开关元件以及一个确定步进速率的变频脉冲源。
动态力矩:在一定步进速率下电机所产生的力矩。动态力矩可由PULL IN(牵入)力矩或PULL OUT(牵出)力矩所表示。
保持力矩:绕组在通以稳态直流电时,能使电机的输出轴旋转所要求的力矩。
惯性:物体对加速或减速的惯性测量值。通常用于指电机所移动负载的惯性,或电机转子的惯性。
线性步进增量:转子每旋转一个步距角导向螺杆所产生的线性行程。
每秒脉冲数(PPS):电机在一秒钟内所产生的步数(有时称为“步数/秒”)。这由电机驱动器所产生的脉冲频率所决定。
升降速:在电机不失步的情况下,将给定负荷从原有的低步进速率增加至最大,接着再降低至原有速率的一种驱动技术。
单一步进响应:电机进行完事的一步所要求的时间。
步进:电机每接收一个脉冲时转子所转的角度。对于直线电机来说,步进为直线距离。
步距角:每一步转子所产生的旋转,测量单位为度。
每周旋转步数:转子旋转360°所需要的总步数。
PULL OUT(牵出)力矩:电机在恒速下能够产生的最大力矩。因为速度不变,所有也没有惯性力矩。同时转子内部的动能和惯性载荷使运行力矩增大。
PULL IN(牵入)力矩:必须克服转子惯量的加速转矩,以及加速时固定连接的外接负载和各种摩擦转矩。因此,起动力矩通常小于运行力矩。
力矩与惯性比率:保持力矩除以转子惯量。


 /2
/2 





用户1460054 2010-8-4 14:31