
SD卡由日本松下、东芝及美国SanDisk公司于1999年8月共同开发研制。<?xml:namespace prefix = o ns = "urn:schemas-microsoft-com:office:office" />
SD卡的结构能保证数字文件传送的安全性,也很容易重新格式化,因此越来越多的被应用的嵌入式系统中。
SD卡的使用非常方便,常见的有两种工作模式:SPI和SDIO。SPI是串行的工作模式,速度相对较低,但是使用方便,只要MCU含有SPI接口均可使用。SDIO模式,可以最多4线传输,因此速度比较快,由于SD卡的普及,越来越多的MCU内部集成了SDIO控制器,简化了我们的工作。本文以三星s<?xml:namespace prefix = st1 ns = "urn:schemas-microsoft-com:office:smarttags" />3c2410为例介绍。
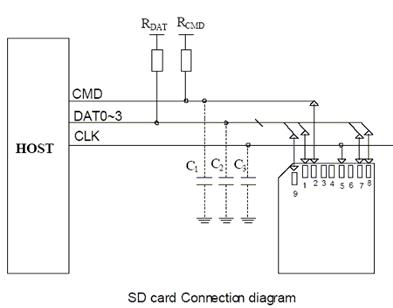
1. SD卡的接口电路
<?xml:namespace prefix = v ns = "urn:schemas-microsoft-com:vml" />
2. SD卡的协议
SD卡的控制指令非常强大,支持SPI,SDIO模式,兼容MMC等。而且不同的
指令有不同的响应(3种),这在我们使用指令是要注意的。我在附件里面放了一个SD卡的中文协议,包括数据包介绍,指令索引介绍,反馈介绍等。
3. S3C2410 SD卡控制器的介绍
SD卡控制器帮我们完成了协议上的很多工作,我们只需要按照协议配置寄存器
以及按照协议流程对SD卡操作就可以完成SD卡的功能了。
SDICON:完成SD卡基础配置,包括大小端,中断允许,模式选择,时钟使能等。
SDIPRE:对SDCLK的配置。
SDICARG:指令的参数存放在这里
SDICCON:控制指令形式的寄存器,配置SPI还是SDI指令,指令的反馈长度,是否等待反馈,是否运行指令,指令的索引等
SDICSTA:指令状态寄存器,指令是否超时,传送,结束,CRC是否正确等
SDIRSPO:反映SD的状态
SDITIMER:设置超时时间
SDIBSIZE:block的大小
SDIDCON:数据控制寄存器,配置是几线传输,数据发送方向,数据传送方式等。
SDIDSTA: 数据状态寄存器,数据是否发送完,CRC效验,超时等
SDIFSTA: FIFO状态积存器,DMA传输时否判断FIFO
SDIMSK:中断屏蔽
4. SD卡SDIO模式的驱动分析
4.1 SD卡的初始化
步骤是:1)配置时钟,慢速一般为400K,设置工作模式
2)发送CMD0,进入空闲态,该指令没有反馈
3)发送CMD55+ACMD41,判断SD卡的上电是否正确,短反馈
4)发送CMD2,验证SD卡是否接入,长反馈
5)发送CMD3,读取SD卡的RCA(地址),短反馈
6)发送CMD7,使能SD卡
7)配置高速时钟,准备数据传输,一般20M~25M
8)发送CMD55+ACMD6配置为4bit数据传输模式
代码如下:
int SD_card_init(void)
{
int i;
char key;
rSDIPRE=PCLK/(2*INICLK)-1; //时钟 400KHz
rSDICON=(1<<4)|(1<<1)|1; // Type B, FIFO reset, clk enable
rSDIBSIZE=0x200; // 512byte(128word)
rSDIDTIMER=0xffff; // Set timeout count
for(i=0;i<0x1000;i++); // Wait 74SDCLK for MMC card
CMD0(); //进入idle
//-- CheckSD card OCR
if(Chk_SD_OCR()) //发送AM41,判断电压正确否
;
else
{
;
return 0;
}
RECMD2:
rSDICARG=0x0;
// CMD2(stuff bit),判断连接
rSDICCON=(0x1<<10)|(0x1<<9)|(0x1<<8)|0x42;
//lng_resp, wait_resp, start, CMD2
//-- Check end of CMD2
if(!Chk_CMDend(2, 1)) //查询反馈是否正确
goto RECMD2;
RECMD3:
//--Send RCA,得到SD卡的地址
rSDICARG=MMC<<16;
// CMD3(MMC:Set RCA, SD:Ask RCA-->SBZ)
rSDICCON=(0x1<<9)|(0x1<<8)|0x43;
// sht_resp, wait_resp, start, CMD3
//-- Check end of CMD3
if(!Chk_CMDend(3, 1))
goto RECMD3;
//--Publish RCA
RCA=( rSDIRSP0 & 0xffff0000 )>>16;
//--State(stand-by) check
if( rSDIRSP0 & 0x1e00!=0x600 )
// CURRENT_STATE check 验证反馈
goto RECMD3;
rSDIPRE=PCLK/(2*NORCLK)-1;
// 设置高速时钟Normal clock="25MHz"
Card_sel_desel(1); // Select SD
Set_4bit_bus(); //设置为4bit模式
}
void Set_4bit_bus(void)
{
Wide=1;
SetBus();
}
void SetBus(void)
{
SET_BUS:
CMD55();
// Make ACMD
//-- CMD6 implement
rSDICARG=Wide<<1;
//Wide 0: 1bit, 1: 4bit
rSDICCON=(0x1<<9)|(0x1<<8)|0x46;
//sht_resp, wait_resp, start, CMD55
if(!Chk_CMDend(6, 1)) // ACMD6
goto SET_BUS;
}
4.2SD卡的读与写
读写就是正反向的问题,这里只分析读
步骤:1)读单block CMD17 多block CMD18
(写单block CMD24 多block CMD25)
2)发送CMD12,终止数据传输
程序如下:采用DMA模式
void Rd_Block(void)
{
int status;
rd_cnt=0;
rSDICON |= rSDICON|(1<<1); // FIFO reset
rSDICARG=0x0; // CMD17/18(addr参数)
RERDCMD:
pISR_DMA0=(unsigned)DMA_end; //DMA的相关配置
rINTMSK = ~(BIT_DMA0);
rDISRC0=(int)(SDIDAT); // SDIDAT
rDISRCC0=(1<<1)+(1<<0); // APB, fix
rDIDST0=(U32)(Rx_buffer); // Rx_buffer
rDIDSTC0=(0<<1)+(0<<0); // AHB, inc
rDCON0=(1<<31)+(0<<30)+(1<<29)+(0<<28)+(0<<27)+(2<<24)+(1<<23)+(1<<22)+(2<<20)+128*block;
//handshake, sync PCLK, TC int, single tx, single service, SDI, H/W request,
//auto-reload off, word, 128blk*num
rDMASKTRIG0=(0<<2)+(1<<1)+0;
//no-stop, DMA2 channel on, no-sw trigger
rSDIDCON=(1<<19)|(1<<17)|(Wide<<16)|(1<<15)|(2<<12)|(block<<0);
// Rx after rsp, blk, 4bit bus, dma enable, Rx start, blk num
if(block<2) // SINGLE_READ
{
rSDICCON=(0x1<<9)|(0x1<<8)|0x51;
// sht_resp, wait_resp, dat, start, CMD17
if(!Chk_CMDend(17, 1))
//-- Check end of CMD17
goto RERDCMD;
}
else // MULTI_READ
{
rSDICCON=(0x1<<9)|(0x1<<8)|0x52;
// sht_resp, wait_resp, dat, start, CMD18
if(!Chk_CMDend(18, 1))
//-- Check end of CMD18
goto RERDCMD;
}
while(!TR_end);
rINTMSK |= (BIT_DMA0);
TR_end=0;
rDMASKTRIG0=(1<<2); //DMA0 stop
break;
default:
break;
}
//-- Check end of DATA
if(!Chk_DATend())
;
rSDIDSTA=0x10; // Clear data Tx/Rx end
if(block>1)
{
RERCMD12:
//--Stop cmd(CMD12)
rSDICARG=0x0; //CMD12(stuff bit)
rSDICCON=(0x1<<9)|(0x1<<8)|0x4c;
//sht_resp, wait_resp, start, CMD12
//-- Check end of CMD12
if(!Chk_CMDend(12, 1))
goto RERCMD12;
}
}
4.3上面用到的响应判断函数
主要完成对反馈状态的分析。
函数如下:
int Chk_CMDend(int cmd, int be_resp) //指令反馈判断函数
{
int finish0;
if(!be_resp) // No response
{
finish0=rSDICSTA;
while((finish0&0x800)!=0x800) // 验证指令是不是发送
finish0=rSDICSTA;
rSDICSTA=finish0; // Clear cmd end state
return 1;
}
else // With response
{
finish0=rSDICSTA;
while( !( ((finish0&0x200)==0x200) | ((finish0&0x400)==0x400) ))
// 验证反馈响应完成
finish0=rSDICSTA;
if(cmd==1 | cmd==9 | cmd==41) // CRC no check
{
if( (finish0&0xf00) != 0xa00 ) // CRC是否错误
{
rSDICSTA=finish0; // Clear error state
if(((finish0&0x400)==0x400)) // 验证超时
return 0; }
rSDICSTA=finish0;
// Clear cmd & rsp end state
}
else // CRC check
{
if( (finish0&0x1f00) != 0xa00 ) // Check error
{
;
rSDICSTA=finish0; // Clear error state
if(((finish0&0x400)==0x400))
return 0; // Timeout error
}
rSDICSTA=finish0;
}
return 1;
}
}
int Chk_DATend(void)
{
int finish;
finish=rSDIDSTA;
while( !( ((finish&0x10)==0x10) | ((finish&0x20)==0x20) ))
// Chek timeout or data end
finish=rSDIDSTA;
if( (finish&0xfc) != 0x10 )
{
rSDIDSTA=0xec; // Clear error state
return 0;
}
return 1;
}
int Chk_BUSYend(void) //数据反馈判断函数
{
int finish;
finish=rSDIDSTA;
while( !( ((finish&0x08)==0x08) | ((finish&0x20)==0x20) ))
finish=rSDIDSTA; //等待数据发送完成或超时
if( (finish&0xfc) != 0x08 )
{
rSD
IDSTA=0xf4; //clear error state
return 0;
}
return 1;
}



 /1
/1 


用户401565 2012-10-20 17:00
很好
用户539229 2009-6-7 19:36
用户789309 2009-6-5 21:25