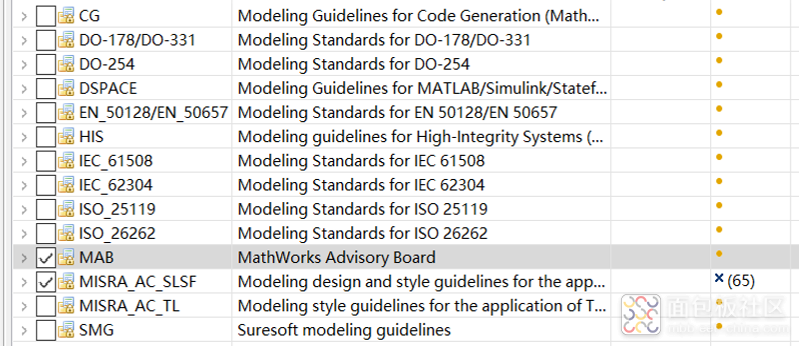
在车载电子电气系统深度影响行车安全的当下,电控系统电子化控制程度持续提升,汽车软件开发生命周期缩短。基于模型设计(MBD)开发控制器应用层软件成为主流,尤其在新能源与智能驾驶领域优势显著。但该模式下,模型、生成代码及最终软件的质量保障成为行业关注重点。企业亟需通过模型静态测试,统一建模风格、优化架构、规避缺陷,构建符合功能安全及ASPICE要求的质量体系。 基于此,模型静态测试在保障模型质量及提升测试效率环节关键效用凸显。 实现模型规范自动化检测,提升人力与硬件资源利用效率。 助力企业建立专属建模规范,应对功能安全开发、ASPICE流程改进及质量提升。 搭建完善的供应商软件质量管理体系,确保模型代码可靠性。 便于可持续集成,固化测试流程、加速迭代,实现数据可追溯与关联。 Model Inspector模型静态测试工具 Model Inspector是一款专门针对汽车、航空、轨交等行业的静态模型检查工具,可以对模型进行自动化、批量化建模规范和复杂度量的检查,提升用户模型质量。其内置符合ISO26262、IEC61508、DO178C、 IEC 62304、IEC62279、DO-330、IEC60080、EN50128等行业标准的映射规则集,且支持自定义构建规则集,可以根据所选规范、项目需求、使用频率等形成项目匹配的规范库,统一的建模风格、模型配置可以保证模型的复杂程度合适、架构设计合理,提高模型整体的可读性和可复用性。 建模规范支持列项 Model Inspector主要技术指标和性能 1. 测试流程简洁清晰,可按需进行单/多模型,或各检测项自由组合式配置 模型静态测试流程 2. 支持多种行业模型规则集的检查,如DO-178,DSPACE、HIS、IEC 61508、IEC 62304、ISO 26262、MAB/MAAB、MISRA_AC_TL等 行业规则集覆盖情况 上图中各类规范介绍 MAB: MAB规范是由独立的行业工作组(多个行业的主要OEM和供应商组成)针对 MATLAB、Simulink、Stateflow和 Embedded Coder的使用制定的一套建模规范; MISRA_AC_SLSF: Simulink和Stateflow应用的建模设计和风格指南,由汽车工业软件可靠性协会(MISRA)推出; MISRA_AC_TL: 在自动代码生成环境中TargetLink应用的建模风格指南; DSPACE:MATLAB/Simulink/Stateflow和TargetLink建模指南; HIS:高完整性系统建模指南; CG:代码生成的建议指南; 除此,Suresoft结合多年厂商经验制定的一份工具专用建模指南SMG也可作为企业形成更完善企标的推荐参考。 3. 支持一键式自动检查规则。Model Inspector选定模型和规范后可以检查一键式自动检查规则,检查性能更快,还支持在每个项目的基础上管理模型、规则和检查结果。 一键式自动检查 4. 支持模型的自动修复,一键轻松快速校正。Model Inspector支持一键自动校正模型,根据违规修正建议进行修改,可自动修改模块和模型属性,包含配置项、背景、模块名字、显示和形状等。 一键式自动修正模型 5. 支持21种模型质量度量指标。Model Inspector支持21种模型度量指标,包含复杂度、内聚度、耦合度等,支持多层级模型的检查,可以自定义筛选模型或模块进行检测。从MATLAB代码行数、复杂度,到Simulink模块、子系统、库,再到Stateflow各类转移,以及数据结构层级分析、复杂度分析等,针对整个模型/单个子系统分别统计,支持用户定义检查阈值。 模型度量指标 6. 显示检测后的Dashboard记录规则检查和度量分析结果,并与MATLAB进行联动。 Dashboard平台管理 7. 提供历史标签,方便开发和测试人员对模型进行改进。测试人员与开发人员联合进行测试标记,共同推动模型质量改进。可查看违规趋势、差别检查规则和特定违规度量信息。 协同开发测试 8. 生成多种类别测试报告,并可直接追溯模型问题。支持多种类别报告形式的生成,如PDF、DOC、XLSX、HTML格式等,并且报告可以进行模型的追溯,便于从报告问题直接定位到模型来进行修正。 9. 支持模型规则集和模型质量度量的定制开发 定制化规范 10. 获得多行业功能安全认证证书。同时,便捷支持CICD集成,如:Jenkins、Devops等。 经纬恒润在嵌入式MBD测试领域拥有超过10年以上的咨询和实战经验,具有丰富的项目经验和深厚的技术功底,能够针对客户的特定需求提供定制化的模型测试咨询服务。



 标签: 软件测试
标签: 软件测试


