热度 9
2022-4-29 09:31
2288 次阅读|
0 个评论
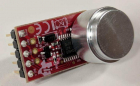
本项目是一个采用Traffic LED模块、Arduino Uno/Nano,以及TOF10120飞行时间传感器的工业级智能停车系统。项目采用一块切边的垫子作为停车区,先测量垫子长度,再根据这个数值定义不同距离的代码,一个接一个的点亮(ON)和熄灭(OFF)这些LEDs,以帮助司机安全停车: 当汽车即将进入停车区域时,绿色LED点亮。然后,黄色LED点亮,提醒司机即将接近目标停车位置,这表明汽车车身已经有一半位于停车区域。 当红色LED开始闪烁时,警告司机缓慢行驶并留意,到达停车点后关闭汽车,或者继续移动直到红色LED停止闪烁。 作为一个用以理解停车系统的原型,项目使用的均为廉价元件。读者可对电路进行升级,如改变代码中的测量距离数值,甚至替换电路中的传感器等,使项目更加实用。 ToF10120飞行时间传感器 tof10120激光模块最大的优势在于测距远、操作简单,程序中仅仅需要通过单片机给模块串口发送命令字符串,就可以向单片机发送回距离数据。如果发送自动测距的字符串命令,则模块会按照一定频率自动回送数据,相关物理量都可以通过命令字符串设置。传感器仅需要串口就可以实现。 TOF10120基于Sharp低成本标准CMOS工艺和SPAD技术,可为自动对焦(AF)提供精确、可重复的长距离测量,测量结果不受物体反射的影响。主要特点包括: ・采用940nm激光; ・小型陶瓷封装(20×13.2×2.0mm); ・ 可在室内测量长达1.8m长度,精度5%; ・测量距离不受姆堡反射的影响; ・先进广促俄串扰补偿技术; ・30ms高速测量; ・单电源供电; ・Txd接口用于设备控制和数据传送; ・无铅,符合RoHS指令。 TOF10120典型测距范围为100-1800mm,电源电压3-5v,消耗电流35mA,兼容Arduino、ESP8266、ESP32等5V和3.3V控制板,适合-20°C to +70°C等室内外环境。 TOF10120支持UART、I2C通讯,1#引脚、2#引脚、3#引脚、4#引脚、5#引脚、6#引脚分别为GND、VDD、RXD、TXD、SDA、SCL。在六个引脚中,本项目只使用了其中的GND, VDD, SDA, and SCL四个脚。 根据数据表,TOF10120的I2C地址为0xA4,但寻址采用高7bit即0x52,这相当于82。 交通LED模块 该模块为司机提供指示,本身带有限流电阻,无需额外连接电阻器。 模块共有4个公头,GND引脚链接与控制器的GND引脚,或数字引脚。这样,5v信号将熄灭模块,GND or LOW电平信号将启动模块。其中,R标号代表红色LED, Y标号代表黄色LED,G标号代表绿色LED,高电平信号时LED点亮。 连接电路 首先,按照电路图,5V电源由LM7805三端稳压器提供给Arduino Nano,后面需要连接一个470uF的去耦铝电解电容器。 其中,5v稳压连接到Arduino Nano的VIN引脚,TOF10120激光测距模块的SCL、SDA引脚分别连接于Arduino板子的A5、A4引脚,电源线链接于Arduino板子的5V和接地引脚。 信号灯LED模块的GND引脚链接到Arduino板子的5号引脚,红色LED链接到Arduino的4号引脚,黄色LED连接到3号引脚,绿色LED连接到2号引脚。 PCB设计 接下来,设计Arduino Nano PCB开发板,母头用于3.3V、12V、5V和接地,左侧作为Vero板用来焊接其他电子元件,Arduino Nano的左右两侧都设计母头来连接跳线,也可连接传感器和电子元器件,例如TOF10120传感器和OLED显示模块的I2C引脚。 最后,将Traffic LED模块连接于Arduino板子的5、4、3、2引脚,再用公头连来连接TOF10120传感器的GND、Vdd、SCL、SDA引线。 做完上述连接后,就使用下述代码进行I2C寻址: #include void setup() { Wire.begin(); Serial.begin(115200); Serial.println("\nI2C Scanner"); } void loop() { byte error, address; int nDevices; Serial.println("Scanning..."); nDevices = 0; for(address = 0; address <= 127; address++ ) { Wire.beginTransmission(address); error = Wire.endTransmission(); if (error == 0) { Serial.print("I2C device found at address 0x"); if (address<16) Serial.print("0"); Serial.print(address, HEX); Serial.println(" !"); nDevices++; } else if (error==4) { Serial.print("Unknow error at address 0x"); if (address<16) Serial.print("0"); Serial.println(address,HEX); } } if (nDevices == 0) Serial.println("No I2C devices found\n"); else Serial.println("done\n"); delay(30000); } #include void setup() { Wire.begin(); Serial.begin(115200); Serial.println("\nI2C Scanner"); } void loop() { byte error, address; int nDevices; Serial.println("Scanning..."); nDevices = 0; for(address = 0; address <= 127; address++ ) { Wire.beginTransmission(address); error = Wire.endTransmission(); if (error == 0) { Serial.print("I2C device found at address 0x"); if (address<16) Serial.print("0"); Serial.print(address, HEX); Serial.println(" !"); nDevices++; } else if (error==4) { Serial.print("Unknow error at address 0x"); if (address<16) Serial.print("0"); Serial.println(address,HEX); } } if (nDevices == 0) Serial.println("No I2C devices found\n"); else Serial.println("done\n"); delay(30000); } 上述代码上传完成后,打开serial monitor就会看到TOF10120激光传感器的I2C地址。按照数据手册,TOF10120模块的I2C地址为0xA4,由于其寻址采用了高7 bits,这样就变成了0x52,相当于82。 至此,大家已经知道了i2c地址,可以把TOF10120测距传感器模块固定到板子上了。该传感器须固定到适当的高度,以检测车辆和距离。这当然不难,你可以竖一个底部带有螺丝的胶块,我为了方便站了一个充电器的外壳,只要高度满足即可。 下面是本项目的代码,我是按照裁剪的垫子大小来写的,这个尺寸正好就是停车区域的大小。 /* Smart Car Parking system Code * In this project the TOF10120 Laser Distance Sensor is used for measuring the distance. */ #include // Traffic LED Module interfacing with Arduino Uno or Arduino Nano int GND_PIN = 5; int RED_PIN = 4; int YELLOW_PIN = 3; int GREEN_PIN = 2; unsigned char ok_flag; unsigned char fail_flag; unsigned short lenth_val = 0; unsigned char i2c_rx_buf ; unsigned char dirsend_flag=0; int x_mm; // distance in millimeters float y_inches; // distance in inches void setup() { Wire.begin(); Serial.begin(9600,SERIAL_8N1); printf_begin(); pinMode(GND_PIN, OUTPUT); pinMode(RED_PIN, OUTPUT); pinMode(YELLOW_PIN, OUTPUT); pinMode(GREEN_PIN, OUTPUT); digitalWrite(GND_PIN, LOW); digitalWrite(RED_PIN, LOW); digitalWrite(YELLOW_PIN, LOW); digitalWrite(GREEN_PIN, LOW); } void loop() { x_mm = ReadDistance(); // Serial.print(x_mm); // Serial.println(" mm"); // You can convert millimeters to inches in one of two ways: divide the number of millimeters by 25.4, or multiply the number of millimeters by 0.0394 y_inches = x_mm * 0.0394; // Serial.print(y_inches); // Serial.println(" inches"); 0) && (y_inches <= 3) ) { digitalWrite(RED_PIN, HIGH); digitalWrite(YELLOW_PIN, LOW); digitalWrite(GREEN_PIN, LOW); } 3) && (y_inches <= 6) ) { digitalWrite(RED_PIN, HIGH); delay(200); digitalWrite(RED_PIN, LOW); delay(200); digitalWrite(YELLOW_PIN, LOW); digitalWrite(GREEN_PIN, LOW); } 6) && (y_inches <= 10) ) { digitalWrite(RED_PIN, LOW); digitalWrite(YELLOW_PIN, HIGH); digitalWrite(GREEN_PIN, LOW); } 10) && (y_inches <= 20) ) { digitalWrite(RED_PIN, LOW); digitalWrite(YELLOW_PIN, LOW); digitalWrite(GREEN_PIN, HIGH); } 20 ) { digitalWrite(RED_PIN, LOW); digitalWrite(YELLOW_PIN, LOW); digitalWrite(GREEN_PIN, LOW); } if ( y_inches < 0 ) { digitalWrite(RED_PIN, LOW); digitalWrite(YELLOW_PIN, LOW); digitalWrite(GREEN_PIN, LOW); } } int serial_putc( char c, struct __file * ) { Serial.write( c ); return c; } void printf_begin(void) { fdevopen( &serial_putc, 0 ); } void SensorRead(unsigned char addr,unsigned char* datbuf,unsigned char cnt) { unsigned short result=0; // step 1: instruct sensor to read echoes Wire.beginTransmission(82); // transmit to device #82 (0x52), you can also find this address using the i2c_scanner code // the address specified in the datasheet is 164 (0xa4) // but i2c adressing uses the high 7 bits so it's 82 Wire.write(byte(addr)); // sets distance data address (addr) Wire.endTransmission(); // stop transmitting // step 2: wait for readings to happen delay(1); // datasheet suggests at least 30uS // step 3: request reading from sensor Wire.requestFrom(82, cnt); // request cnt bytes from slave device #82 (0x52) // step 5: receive reading from sensor if (cnt <= Wire.available()) { // if two bytes were received *datbuf++ = Wire.read (); // receive high byte (overwrites previous reading) *datbuf++ = Wire.read (); // receive low byte as lower 8 bits } } int ReadDistance(){ SensorRead(0x00,i2c_rx_buf,2); lenth_val=i2c_rx_buf ; lenth_val=lenth_val<<8; lenth_val|=i2c_rx_buf ; delay(300); return lenth_val; } /* Smart Car Parking system Code * In this project the TOF10120 Laser Distance Sensor is used for measuring the distance. */ #include // Traffic LED Module interfacing with Arduino Uno or Arduino Nano int GND_PIN = 5; int RED_PIN = 4; int YELLOW_PIN = 3; int GREEN_PIN = 2; unsigned char ok_flag; unsigned char fail_flag; unsigned short lenth_val = 0; unsigned char i2c_rx_buf ; unsigned char dirsend_flag=0; int x_mm; // distance in millimeters float y_inches; // distance in inches void setup() { Wire.begin(); Serial.begin(9600,SERIAL_8N1); printf_begin(); pinMode(GND_PIN, OUTPUT); pinMode(RED_PIN, OUTPUT); pinMode(YELLOW_PIN, OUTPUT); pinMode(GREEN_PIN, OUTPUT); digitalWrite(GND_PIN, LOW); digitalWrite(RED_PIN, LOW); digitalWrite(YELLOW_PIN, LOW); digitalWrite(GREEN_PIN, LOW); } void loop() { x_mm = ReadDistance(); // Serial.print(x_mm); // Serial.println(" mm"); // You can convert millimeters to inches in one of two ways: divide the number of millimeters by 25.4, or multiply the number of millimeters by 0.0394 y_inches = x_mm * 0.0394; // Serial.print(y_inches); // Serial.println(" inches"); 0) && (y_inches <= 3) ) { digitalWrite(RED_PIN, HIGH); digitalWrite(YELLOW_PIN, LOW); digitalWrite(GREEN_PIN, LOW); } 3) && (y_inches <= 6) ) { digitalWrite(RED_PIN, HIGH); delay(200); digitalWrite(RED_PIN, LOW); delay(200); digitalWrite(YELLOW_PIN, LOW); digitalWrite(GREEN_PIN, LOW); } 6) && (y_inches <= 10) ) { digitalWrite(RED_PIN, LOW); digitalWrite(YELLOW_PIN, HIGH); digitalWrite(GREEN_PIN, LOW); } 10) && (y_inches <= 20) ) { digitalWrite(RED_PIN, LOW); digitalWrite(YELLOW_PIN, LOW); digitalWrite(GREEN_PIN, HIGH); } 20 ) { digitalWrite(RED_PIN, LOW); digitalWrite(YELLOW_PIN, LOW); digitalWrite(GREEN_PIN, LOW); } if ( y_inches < 0 ) { digitalWrite(RED_PIN, LOW); digitalWrite(YELLOW_PIN, LOW); digitalWrite(GREEN_PIN, LOW); } } int serial_putc( char c, struct __file * ) { Serial.write( c ); return c; } void printf_begin(void) { fdevopen( &serial_putc, 0 ); } void SensorRead(unsigned char addr,unsigned char* datbuf,unsigned char cnt) { unsigned short result=0; // step 1: instruct sensor to read echoes Wire.beginTransmission(82); // transmit to device #82 (0x52), you can also find this address using the i2c_scanner code, which is available on electroniclinic.com // the address specified in the datasheet is 164 (0xa4) // but i2c adressing uses the high 7 bits so it's 82 Wire.write(byte(addr)); // sets distance data address (addr) Wire.endTransmission(); // stop transmitting // step 2: wait for readings to happen delay(1); // datasheet suggests at least 30uS // step 3: request reading from sensor Wire.requestFrom(82, cnt); // request cnt bytes from slave device #82 (0x52) // step 5: receive reading from sensor if (cnt <= Wire.available()) { // if two bytes were received *datbuf++ = Wire.read (); // receive high byte (overwrites previous reading) *datbuf++ = Wire.read (); // receive low byte as lower 8 bits } } int ReadDistance(){ SensorRead(0x00,i2c_rx_buf,2); lenth_val=i2c_rx_buf ; lenth_val=lenth_val<<8; lenth_val|=i2c_rx_buf ; delay(300); return lenth_val; } 上面是编程代码,前提是已经下载了 Wire.h 库文件,代码中的距离单位为英寸,欢迎实践和分享。

 标签: 飞行时间传感器
标签: 飞行时间传感器