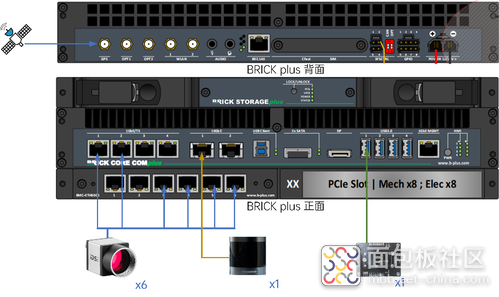
在海洋监测领域,基于无人艇能够实现 高效、实时、自动化 的海洋数据采集,从而为海洋环境保护、资源开发等提供有力支持。其中,无人艇的控制算法训练往往需要大量高质量的数据支持。然而,海洋数据采集也面临 数据噪声和误差 、 数据融合与协同 和 复杂海洋环境适应 等诸多挑战,制约着无人艇技术的发展。 针对这些挑战,我们探索并推出一套 基于多传感器融合的海洋数据采集系统 ,能够高效地采集和处理海洋环境中的多维度数据,为无人艇的自主航行和控制算法训练提供高质量的数据支持。 一、方案架构 无人艇要在复杂海上环境中实现自主导航,尤其是完成障碍物检测和跟踪任务,其关键在于对 海面环境的高效感知 。因此,通过集成多种传感器,包括相机、激光雷达、IMU(惯性测量单元)和GPS(全球定位系统),能够采集更全面、更精确的海洋环境数据。但这种系统也会进一步涉及 时间同步、数据传输与存储以及环境适应性 等问题。 基于以上考虑,采用 BRICKplus(工控机)+ETH6000+传感器套件(6*iDS相机+1*LiDAR+1*IMU+1*GPS) 方案架构,如下图所示: 基于 BRICKplus+ETH6000 构建的数采平台,提供12个以太网接口(10*1Gb+2*10Gb)可以有效接入各个传感器,并为后续升级技术架构、接入更多传感器预留更多空间。多传感器产生的数据量巨大,对数据传输和存储提出了高要求,特别是8MP相机6个同时采集。 采用BRICKplus提供大容量(8/16/32TB)高速写入(16Gbit/s)存储硬盘,能够 高效稳定落盘传感器数据 。采用GPS模块,支持 (g)PTP时间同步与定位 。 二、系统搭建 为了更好的 感知无人艇周边环境信息 ,对传感器分布和方式进行了设计和调整,布局如下图所示。该布局可以更有效的应对海面复杂环境下的数据采集。 三、数据采集 在面向无人艇数据采集时,需要使 传感器套件(四类传感器) 能够同时采集数据,并具备 时间同步,实时可视化、存储和回放 等能力。整体软件架构采用 ROS+传感器 集成方式,支持即插即用,使用便捷。 比如在 iDS相机采集链路 上,涉及到 多相机同步采集 的实现难度大、图像数据的实时传输和存储需求高和动态参数调整的灵活性不足等问题。通过定制化开发,采用 ROS+PEAK SDK 方案进行深度集成,实现了多相机同步采集、实时可视化、动态参数调整等功能,灵活 适应海面复杂的采集环境 ,提高了系统的通用性。 四、总结 在 海洋监测 和 无人艇 控制领域,数据采集的准确性和可靠性至关重要。 基于多传感器融合的海洋数据采集系统方案 ,利用高性能的 BRICKplus+ETH6000模块 作为中央处理单元,连接多个传感器,能够实现高速数据传输和同步。 该系统采 用ROS框架与传感器SDK 进行定制开发,实现了多线程数据采集、处理和发布。同时支持配置文件动态加载传感器参数,支持实时调整和优化,进而显著提高了数据采集的同步性、实时性和可靠性,为 无人艇的自主航行和控制算法训练 提供了高质量的数据支持。

 标签: 算法训练
标签: 算法训练

