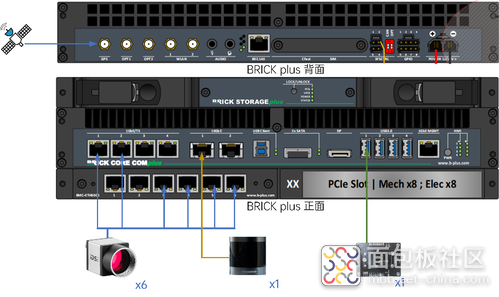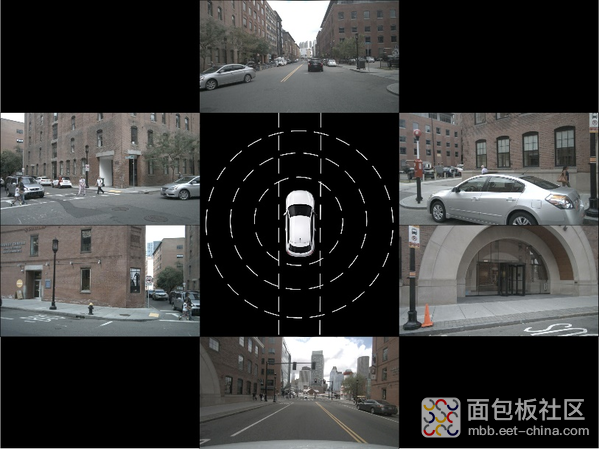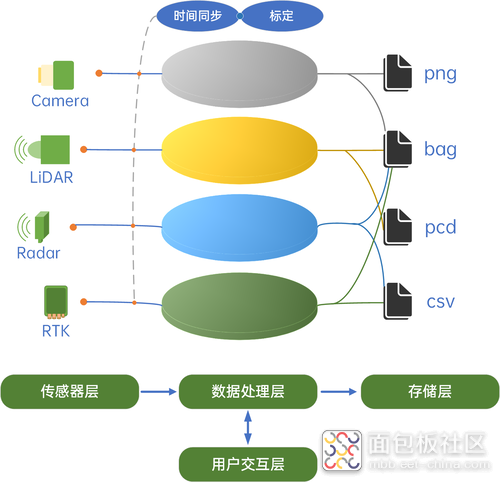
自动驾驶技术的飞速发展,正在重新定义未来出行的边界。从 感知 到 决策 ,从 规划 到 控制 ,每一个环节都离不开 海量、精准 的 高质量数据支撑 。然而,随着传感器数量的增加和数据规模的指数级增长,行业正面临一系列挑战: 多源传感器数据的时间同步难题 、 复杂数据格式的适配 、 测量技术的灵活性不足 、 设备集成周期冗长 等,这些问题正成为自动驾驶研发与测试的“隐形瓶颈”。 基于技术积累与行业洞察,本文分享一套创新的 ADAS时空融合数据采集方案 。通过硬件与软件的深度协同优化,能够很好地解决数据采集中的核心痛点,还为自动驾驶研发提供了高效、可靠、可扩展的完整解决方案。 一、方案架构 该方案以 “时空融合” 为核心,构建了 传感器层、数据处理层、存储层和用户交互层 ,如下图1所示: 图1:方案架构 传感器层: 负责采集数据,包括 LiDAR、Radar、RTK 和 Camera 等传感器。这些传感器从 不同维度感知环境 ,获得图像、点云、高精度定位以及被测目标物等信息,为系统 提供原始数据 。 数据处理层: 对传感器采集的原始数据进行处理。通过时 间同步算法(PTP/gPTP) ,使不同传感器数据在时间上对齐,解决多源传感器数据时间同步难题。运用 标定算法 ,对各传感器进行单传感器标定和传感器间标定,确定传感器之间的空间关系。同时,解析不同格式的数据,使其能在系统中统一处理。 存储层: 负责存储处理后的数据。支持 多种存储格式 ,如激光雷达数据可存为 pcd 格式或 rosbag 包,毫米波雷达和 RTK 数据可选择 csv 格式或 rosbag 包,方便不同场景下的数据使用和分析。并且按照传感器类型将数据分类存入单独文件夹,便于管理和查找。 用户交互层(软件界面) :为用户提供操作入口。软件支持 各个传感器数据的可视化 ,方便用户实时查看传感器采集的信息。允许用户对数据采集进行多种配置,如选择存储路径、设置摄像头采集帧数、选择显示时间戳的来源等。还支持对采集环境进行描述,如记录天气和道路状况,为后续数据分析提供更丰富的背景信息。 二、系统搭建 基于方案架构的功能性设计,系统搭建如图2所示,包括 线束改造 , 时间同步 , 传感器标定 和 数据采集 。 图2:系统搭建 1、线束改造 线束改造方面,采用模 块化线束设计 ,针对不同传感器的接口特性进行定制化适配: (1)多协议兼容: 支持以太网(LiDAR)、CAN 总线(Radar/RTK)、ProFrame(Camera)等多种通信协议,通过标准化接口实现传感器即插即用,大幅缩短设备集成周期。 (2)轻量化布局 :基于车辆工程设计,线束走向遵循最短路径原则,减少冗余布线,提升系统可靠性的同时便于后期维护。 (3)抗干扰优化: 采用屏蔽线缆与差分信号传输,降低电磁干扰对数据质量的影响,保障高速率数据(如 LiDAR 点云、Camera 原始图像)的稳定传输。 2、时间同步 方案通过 硬件触发 + 软件校准 实现多传感器纳秒级时间同步,确保时空融合精度: (1)同步基准统一: 以国际原子时(TAI)为时间基准,通过gPTP(通用精确时间协议)与 PPS(秒脉冲信号)实现系统级时间对齐。LiDAR采用gPTP 同步,Camera 通过采集卡 PPS 信号触发,RTK 与 Radar 通过 CAN Combo 的打上时间戳。 (2)外触发机制: 支持LiDAR 外触发Camera 拍摄,可自定义触发频率(10Hz/20Hz/30Hz),确保图像与点云数据严格同步。实测显示,8MP 相机在 30Hz 触发下,帧间对齐时间误差小于 10μs(一般误差在20-30ms)。 3、传感器标定 通过 标定算法 ,建立传感器与车辆坐标系的空间转换关系: 比如单传感器标定中LiDAR2Car,以 车辆后轴中心 为原点,通过标定板采集点云数据,利用 迭代最近点(ICP)算法 计算 4×4 变换矩阵,实现点云到车辆坐标系的转换。 传感器间标定中LiDAR2Camera,利用 同步采集 的点云与图像数据,通过标定板特征匹配,计算外参矩阵(旋转矩阵 R、平移向量 T),重投影误差均值 0.0138m,支持点云投影到图像像素坐标。 4、数据采集 在数据采集环节,配套软件提供 全流程可视化操作 与 高效数据管理能力 : (1)多模态可视化: 实时显示 LiDAR 点云、Camera 图像、Radar 目标聚类及 RTK 定位信息,支持 分屏监控 与 时间戳同步显示, 便于实时校验数据质量。 (2)灵活配置能力: 格式选择: 支持LiDAR (ros bag)、Radar/RTK (ros bag)、Camera (RAW/PNG)等多种格式,满足不同算法开发需求。 环境标注: 自动记录天气(晴 / 雨 / 雾)、道路类型(城市 / 高速 / 乡村)等元数据,生成包含时间戳、存储路径、传感器配置的场景采集文件,提升数据可追溯性。 (3)稳定存储方案: 按传感器类型生成独立文件夹(如 LiDAR_data、Radar_data),避免数据混杂。 三、总结 通过 线束改造 、 时间同步 、 传感器标定 与 采集软件 的 深度协同 ,以上方案可以系统性解决了多源数据采集中的 时空对齐 、 格式适配 与 高效存储难题 。 具体内容已经通过 实车测试验证 ,支持 厘米级空间定位 与 纳秒级时间同步 ,为自动驾驶算法研发、传感器融合验证提供了可靠的数据基石。



 标签: 时间同步
标签: 时间同步