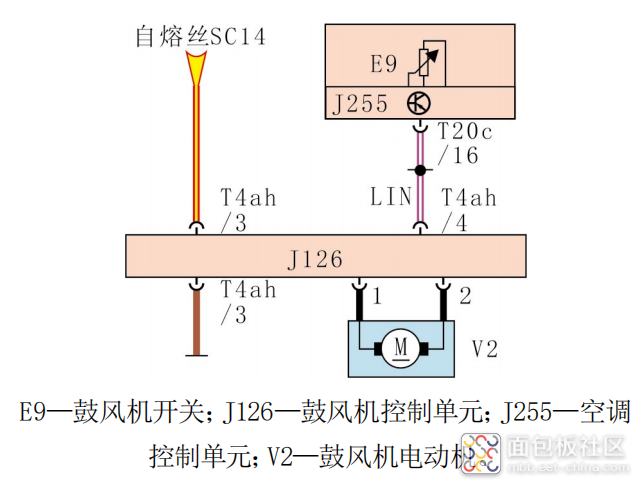
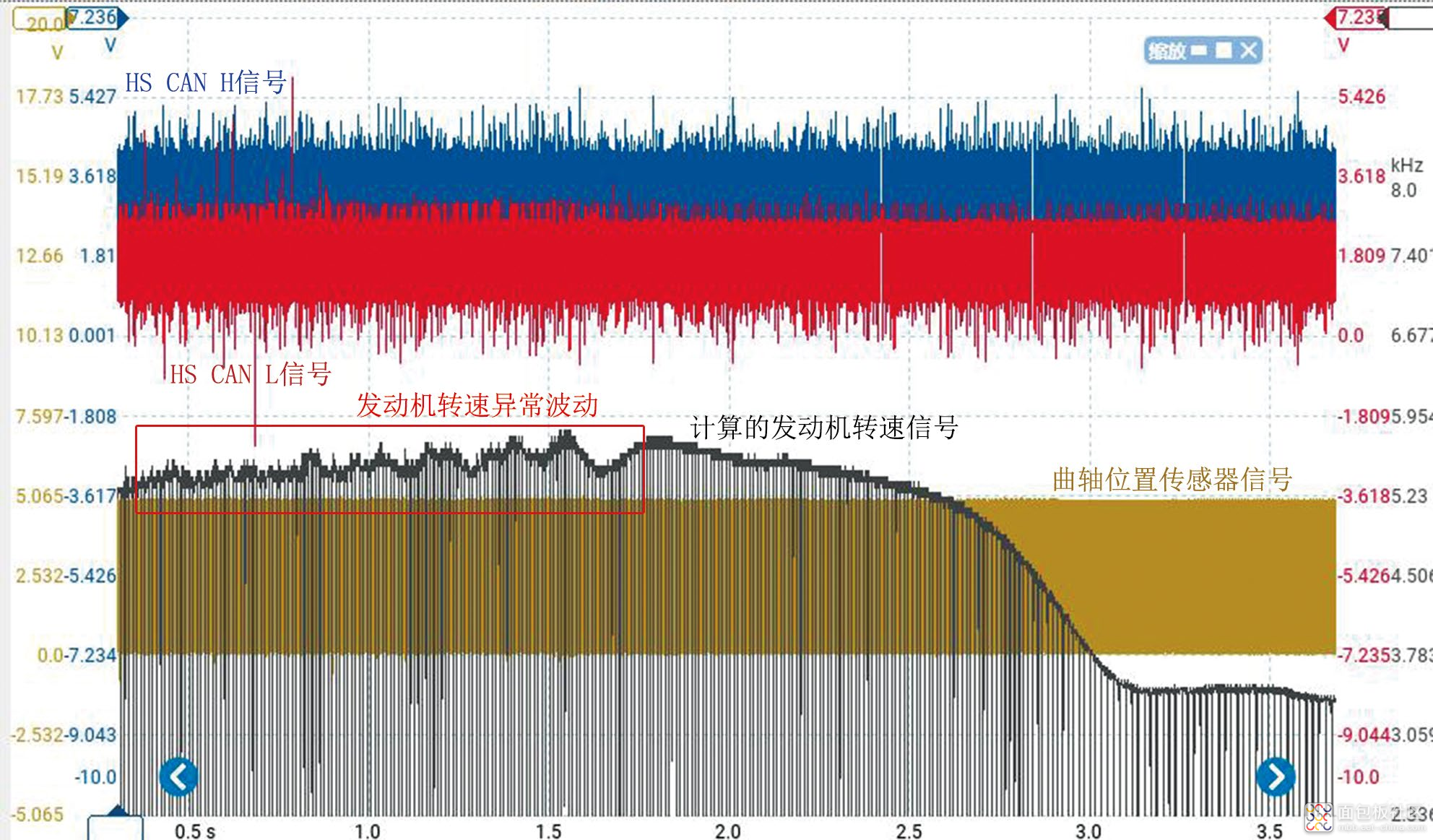
故障现象 一辆 2015款路虎极光车,搭载2.0 L发动机,累计行驶里程约为8万km。起动发动机后组合仪表上提示“充电系统故障”(图1),且充电警告指示灯长亮,但车辆行驶正常。 图 1 组合仪表上的提示信息 故障诊断 用万用表测量发动机怠速时的蓄电池电压,为 13.63 V,说明发电机能够发电。使用故障检测仪检测,网关模块(GWM)中读得故障代码“P0A1A-87 发电机控制模块-信息缺失”。 如图 2所示,GWM通过LIN总线接收蓄电池监测系统模块(BMS)发送的蓄电池状态信息(蓄电池电压、电流、温度、荷电状态等),并以此计算目标电压,然后通过LIN总线将目标电压发送至发电机,控制发电机的发电量。接通点火开关时,组合仪表上的充电警告灯点亮;起动发动机,当GWM检测到发电机发电量正常时充电警告灯熄灭。当发电机及其线路存在故障时,GWM 中会存储相关故障代码,同时组合仪表上的充电警告灯点亮。 图 2 发电机控制原理示意 检查发电机上的导线连接器,未见松动、腐蚀等异常情况。测量发电机与 GWM之间的LIN总线,不存在断路、短路故障。 使用虹科 Pico汽车示波器从发电机侧测量LIN总线上的波形(图3),发现LIN总线上有信号传输,且高、低电位正常。 进行串行译码,发现 LIN总线在循环发送2个报文,一个报文ID为11,只有帧头,没有应答;另一个报文ID为E9,帧头和应答都有。 图 3 故障时测得的LIN总线信号波形 正常情况下,一个完整的 LIN总线信号报文由帧头和应答两部分组成,无论什么时候帧头都是由主机节点发布;当主机节点要发布数据时,帧头和应答均由主机节点发送;当从机节点要发布数据时,帧头由主机节点发布,应答由从机节点发布。脱开发电机导线连接器C1DC14C,发现LIN总线波形无变化。诊断至此,推断发电机(从机节点)损坏,无法对GWM(主机节点)发布的信息进行响应。 故障排除 更换发电机后试车,起动发动机,组合仪表上的提示信息消失,且充电警告灯熄灭,故障排除。再次用 Pico示波器从发电机侧测量LIN总线上的波形(图4),发现ID为11的报文有了应答。 图 4 维修后测得的LIN总线信号波形 案例作者: 蔡永福 案例出处: 《汽车维护与修理》杂志 2024年10月刊-免拆诊断专栏 www.qichebo.com




 标签: LIN总线
标签: LIN总线