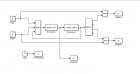
function = spacemodel(t,x,u,flag) %设置系统的初始值、长度、时间等 switch flag, case 0, =mdlInitializeSizes; case 3, sys=mdlOutputs(t,x,u); case {2,4,9} sys= ); end %以上的选择参数 function =mdlInitializeSizes sizes = simsizes; sizes.NumOutputs = 2; sizes.NumInputs = 6; sizes.DirFeedthrough = 1; sizes.NumSampleTimes = 1; sys = simsizes(sizes); x0 = ; ts = ; %以上是输入信号 function sys=mdlOutputs(t,x,u) R1=u(1);dr1=0; R2=u(2);dr2=0; x(1)=u(3); x(2)=u(4); x(3)=u(5); x(4)=u(6); e1=R1-x(1); e2=R2-x(3); e= ; de1=dr1-x(2); de2=dr2-x(4); de= ; Kp= ; Kd= ; tol=Kp*e+Kd*de; sys(1)=tol(1); sys(2)=tol(2); %以上是模型输出信号 这个是控制模型 chap2_1ctrl ,给定一个系统的模型。 function = spacemodel(t,x,u,flag) switch flag, case 0, =mdlInitializeSizes; case 3, sys=mdlOutputs(t,x,u); case {2,4,9} sys= ); end function =mdlInitializeSizes sizes = simsizes; sizes.NumOutputs = 2; sizes.NumInputs = 6; sizes.DirFeedthrough = 1; sizes.NumSampleTimes = 1; sys = simsizes(sizes); x0 = ; ts = ; function sys=mdlOutputs(t,x,u) R1=u(1);dr1=0; R2=u(2);dr2=0; x(1)=u(3); x(2)=u(4); x(3)=u(5); x(4)=u(6); e1=R1-x(1); e2=R2-x(3); e= ; de1=dr1-x(2); de2=dr2-x(4); de= ; Kp= ; Kd= ; tol=Kp*e+Kd*de; sys(1)=tol(1); sys(2)=tol(2); 这个是控制模型 chap2_1plant ,检测系统的模型。 本身这两个模型是一样的,唯一的不同点,一个是给定的系统模型,可以认为是精确的,后一个模型是检测模型,有一定的误差。 模型如图所示。 close all; figure(1); subplot(211); plot(t,x1(:,1),'r',t,x1(:,2),'b'); xlabel('time(s)');ylabel('position tracking of link 1'); subplot(212); plot(t,x2(:,1),'r',t,x2(:,2),'b'); xlabel('time(s)');ylabel('position tracking of link 2'); figure(2); subplot(211); plot(t,tol(:,1),'r'); xlabel('time(s)');ylabel('tol1'); subplot(212); plot(t,tol(:,2),'r'); xlabel('time(s)');ylabel('tol2'); %以上是显示图形程序 仿真后的结果如图所示。 需要源程序或者有任何问题请联系 scut_08@sina.com

 标签: 机器人手臂
标签: 机器人手臂

