
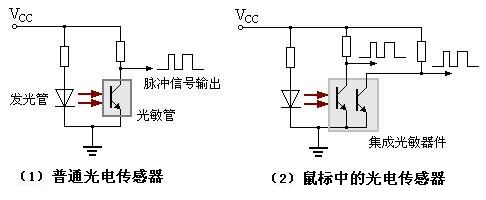
光机鼠标利用两组光电传感器测量鼠标在X和Y方向上的移动,从光敏管的集电极输出一连串的脉冲,脉冲的波头数与位移量之间呈正比。
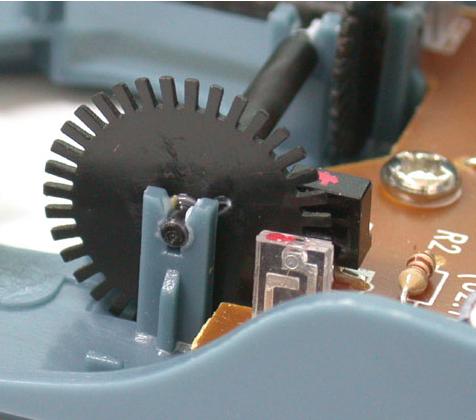
光电传感器的发光管和光敏管分别位于译码轮的锯齿两侧
探长日记《鼠标器的数据格式》一文中曾经谈到,鼠标发往主机的数据共有4种格式,其中P1字节表示鼠标有无移动,而P2、P3两个字节分别表示鼠标上下、左右移动的方向和距离。那么,鼠标仅靠一对光电传感器,如何能够识别移动的方向呢?
首先可以肯定地说,由一只发光管和一只光敏管组成的光电传感器传感器只能检测出轮子的转动角度,而无法判别轮子的转动方向。想要判定轮子的旋转方向,必须使用两对这样的光电传感器。两对传感器一前一后排列,译码轮转动时,两只光敏管导通和截止时间上都存在时间差,它们输出的脉冲信号之间也会有一个相位差(理论值为90°)。这样,当译码轮的转动方向不同时,在方向判定电路的输出端便会得到相反的电平——高电平或低电平。不同的电平经DSP处理,发送给主机的数据也便不同了。
普通光敏管只有两只引脚,双头光敏管却长了三只脚。
那么,后来的光电鼠标为何只用了一对传感器呢?原来,在这个传感器里,光敏器件里面集成了两只光敏管(如上图)。这两只光敏管平行排列,受光时间不同,相当于使用了两只分立的光敏管相同。



 /4
/4 






文章评论(0条评论)
登录后参与讨论