
步进电机早期运行在整步和半步模式。这样驱动器的设计较简单,但是噪声振动大,精度较差。细分功能将绕组的电流变成正弦,形成更加均匀的旋转磁场,使电机运行更加平稳,噪声降低,并在一定程度上提高了电机的精度。
目前的驱动器采用DSP控制,可以将细分设定得很大,如达到51200脉冲/转。步进的运行其实是将运行轨迹通过脉冲数字化,用脉冲来拟合运动轨迹。那么数字化的分辨率决定了运行轨迹的精度,如让电机运行1转,整步只能通过4个脉冲来完成,加减速无法很好规划。如果用51200个脉冲来完成,则可以设计好加减速,使电机运行平稳。
但是细分设置为51200并不代表精度可以达到360/51200=0.007度。步进电机的精度即使通过细分,也通常达到步距角的5%,对于步距角为1.8度的两相步进电机,20细分基本是电机的最大精度了。再提高细分对精度提高不大,但是可以提高轨迹规划的精度。
高细分需要控制器能够发送出足够高频率的脉冲,使用专用的运动控制卡可以达到几百KHz的脉冲频率输出,而许多PLC和低成本的运动控制器脉冲输出频率通常在几十KHZ。一些主控制为单片机等微控制器,发送的脉冲频率较低,只能使用低细分驱动器,速度曲线的加减速特性较差,一些场合让电机直接起跳,噪声和振动较大。
目前有些数字式驱动器内置脉冲滤波功能,可以在低细分低频率的应用场合实现高细分的效果。滤波器可以将无加减速的曲线变成梯形加减速曲线,极大地平滑运动。而梯形加减速曲线经过滤波后变为更加平滑的S形加减速曲线。滤波效果如下:
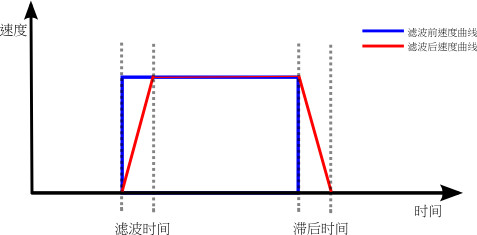
无加速的速度曲线滤波效果
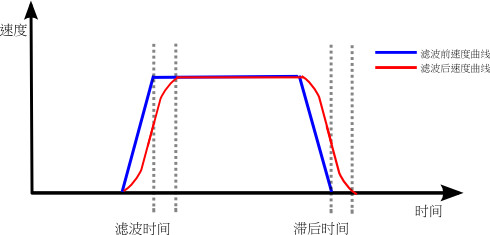
梯形加速曲线滤波效果
5605D2驱动器,内置脉冲滤波器,滤波的大小可以设置为1~512。滤波器在平滑曲线的同时,也引入了运动滞后。滤波值越大,滤波效果越好,但是存在的滞后也越大。
滞后时间 = 脉冲滤波值×50us。
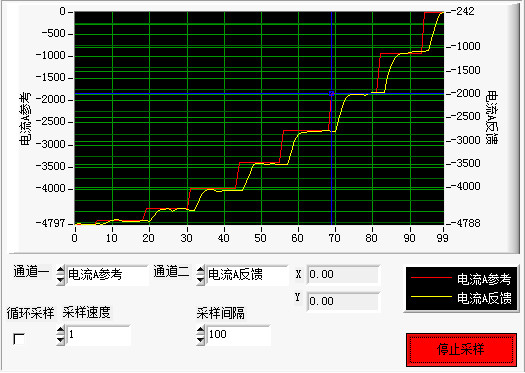
在8细分(1600脉冲/转),输入脉冲频率为1600Hz时的效果如下图:
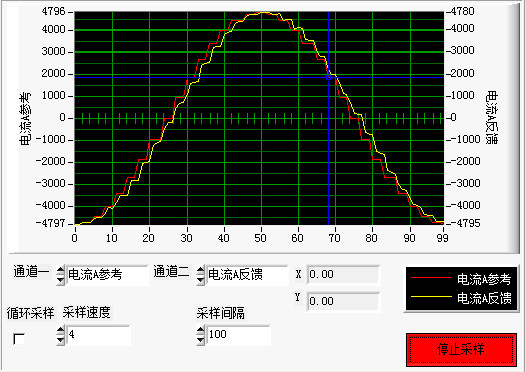
脉冲滤波=1
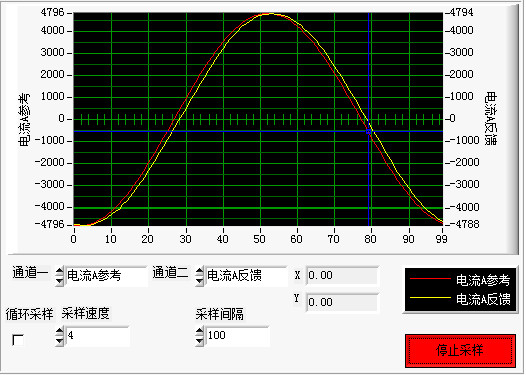
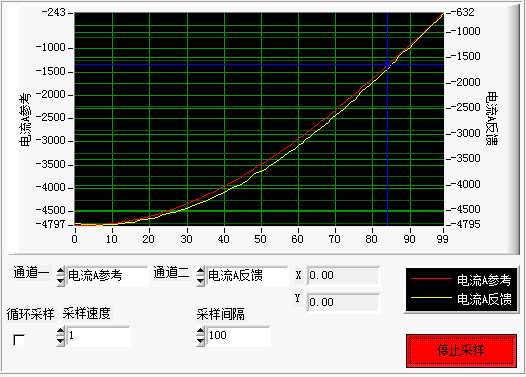
脉冲滤波=128 (6.4ms)
图中横坐标为采样点,每个采样点的周期 = 采样速度 × 50us。上图每个采样点周期 = 200us,一个电流周期为100×200us =20ms。50极对的两相步进电机一转需要50个正弦电流周期,电机一转的时间为1s。
下图为局部放大图形:
脉冲滤波=1
脉冲滤波=128 (6.4ms)
从上图可见,在加入6.4ms的脉冲滤波后,在低速时将离散、阶跃的脉冲响应变成了平滑连续的正弦波,可以大大降低电机运行的噪声与振动。





 /3
/3 





文章评论(0条评论)
登录后参与讨论