
摘要:主要以DSP(TMS<?xml:namespace prefix = st1 ns = "urn:schemas-microsoft-com:office:smarttags" />320C2812)为核心, 通过双轴加速度传感器对汽车的运动状态数据实时采集, 实现对汽车的智能检测以及对不同时刻的运动状态数据做出记录存储,并对汽车安全状况进行预警。系统主要由运动状态检测采集器的硬件设计、预警系统设计和系统应用软件两大部分组成, 采用该装置提高了检测精度, 降低了成本, 简化了安装。<?xml:namespace prefix = o ns = "urn:schemas-microsoft-com:office:office" />
关键词:双轴加速度传感器、DSP(TMS320C2812)、A/D转换
一、 引言
汽车运动状态的检测记录是汽车智能检测(黑匣子) 采集的主要数据之一, 过去一般是通过在汽车传动轴、齿轮箱、发动机等部位加装各种感应传感器来检测汽车的运动状态, 这样不但引线烦多, 改装困难, 而且易损坏, 不易维修。采用由双轴加速度传感器组成的数据采集器只要把该装置平放在汽车的任何部位, 既可检测出汽车是否处在加速、转弯、静止等状态。
二、 汽车运动状态参数采集及预警系统总体设计及原理
2.1 基本硬件结构
汽车运动状态参数采集系统的整个电路主要包括双轴加速度传感器信号采集处理电路、信号放大电路、模拟滤波等。预警系统的整个电路包括激光位移传感器信号采集处理电路、电流信号转换电路、模拟滤波和LED电路等。其基本结构如图1所示。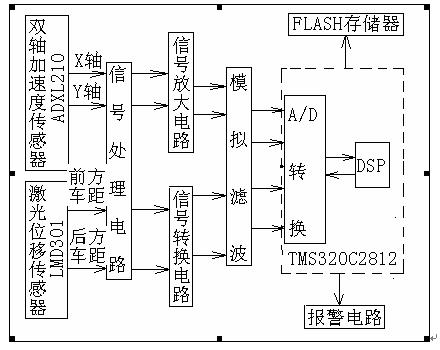
图1 硬件结构框图
2.2 设计原理
要对汽车运动状态参数(如位置、速度、加速度等)进行采集,势必要用到各种传感器,本系统中为了选用最少的传感器,采集最多的运动状态参数,我们选用了一个双轴加速度传感器,根据加速度、速度和位置之间的微积分算法,我们通过测得的加速度就可以测得汽车行驶中的速度和位置两个运动状态。所以软件中我们要用到很多算法,选用DSP作为系统的控制器是一个较好的选择。加速度、速度和位置之间的微积分算法我们会在第4章节中进行详细说明。
当双轴加速度传感器将采集到的X轴和Y轴的加速度信号传递出来后,由于信号较为微弱,我们首先需要对其进行适当放大,使其能适合我们DSP中A/D的要求;接着由于传感器受各种因素的影响,加速度信号中肯定掺杂了很多噪声等高频无用信号,需要对其进行低通滤波;最后将滤波后的信号接入DSP的12位A/D中,对其进行模数转换,在DSP中,我们利用DSP强大的算法功能,利用采集到的加速度信号对其进行一系列的算法,最后解得当时汽车行驶的速度和汽车所在位置;最后将三种运动状态参数(加速度、速度、位置)通过DSP的SPI通信功能送入大容量Flash存储器中。
同理,当激光传感器测得的汽车距离前后车辆的距离低于要求的车距时,DSP会控制LED闪烁,达到报警功能。
三、 汽车运动状态参数采集及预警系统硬件设计及器件选择
3.1 加速度传感器的选择
加速度传感器从设计原理上可分为压阻式、压电式、应变仪式以及伺服加速度计等。从其可靠性和性能价格比上选用美国AD公司的数字化加速度传感器ADXL210, 它是一种带有串行循环数字输出、用于测量加速度和倾斜的传感器。
ADXL210具有下列一系列优点:可测量双轴向加速度;可测量动态加速度(如振动)和静态加速度(如重力加速度);低功耗:<0.6mA,单电源供电:3~5.25V;只需调节外接电容就可方便地调整信号带宽;测量范围:-10g~+10g。
由于ADXL210同时还具有模拟信号输出特性, XFILT/YFILT为模拟电压输出点, 在该点可以外加放大、滤波、A/D转换等措施得到与电压模拟信号成正比的加速度信号。ADXL210的典型带宽为5K,因此可以采取低通(<1M)滤波措施。而且ADXL210是一种全信号调节的加速度计, 当电源电压为3.3V时, 输出电压在零加速度情况下为1.65V,正加速度时产生正向的电压变化, 负加速度时产生反向的电压变化, 对于满量程范围小于等于10g的情况, 最大非线性度为±2% , 输出电压与电源电压成比例关系, 电源电压最大为10.0V ,工作温度为-40℃ TO +125℃, 输入输出阻抗为3.5k , 频率响应0~300Hz,灵敏度100mV/g。
3.2 激光位移传感器的选择
由于本系统是用来测量汽车车距,所以我们需要选择一种大量程的位移传感器,对于本系统精度要求并不是很高,所以我们选择了德国生产的大量程激光测距传感器LMD301。
该传感器是基于激光脉冲反射时差法原理,适用于大量程测量,具有很高的响应时间,及能适用恶劣的工业环境。结实的金属外科,能工作在有害气体环境,安全保护等级IP67,安装维护方便,可提供各种数字口:RS232、RS422、SSI和Profibus。其可以测量300m的量程(无需反射板);0.1ms的响应时间,有同步输入输出;测量精度:±2cm(100HZ),±6cm(2KHZ);分辨率:1mm;测量时间0.5ms ,最高0.1ms;测量速度:0~100ms-1 (0.5~700mm);测量时间:0.1~0.5s。
LMD301输入输出:
模拟输出:4~20mA ;数字输出:RS232/RS422,Profibus,SSI;开关输出:2路,最大电流0.2A;有输入输出同步端;工作温度:-40~60oC;保护等级:IP67。尺寸:136x57x104mm;重量:800g
本系统采用LMD301传感器的4~20mA的模拟输出,后接I/V转换电路,在接入DSP。
3.3 信号放大电路
出于安全考虑,我们规定汽车行驶中,最大加速度不得超过1g,否则报警。由于加速度传感器的灵敏度为100mV/g,因此我们需要对加速度信号进行适当放大,使其在加速度达到1g时,电压输出达到3V左右。放大电路如图2所示,由于AD623具有单电源供电、精度高、温漂小等优点,因此我们选择高精度运放AD623对加速度信号进行放大。
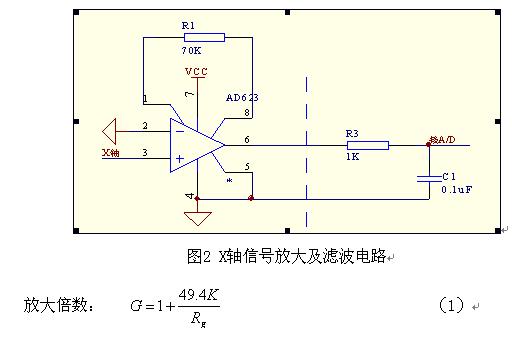
在本系统中,我们知道放大倍数G=3/1.75=1.7143,代入式(1),我们得到Rg=69.1K,我们取Rg=70K。
Y轴信号采用同样的放大及滤波电路。
3.4 信号转换电路
在本系统中应用的激光位移传感器输出部分是采用4~20mA的电流形式,为了便于测量需要将其转换为0~3V的电压形式,转换电路如图3所示。
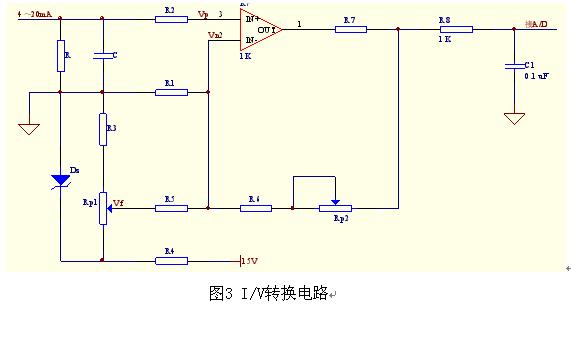
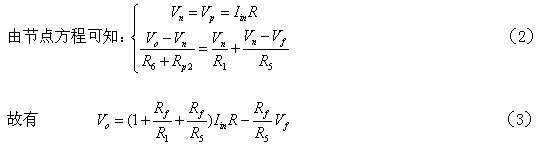
若取R=100,R1=4K,R5=24K,R6+R品=3K时,调整R使Vf=6V,则有:
Vo=0~3V。
由此,此电路就实现了4~20mA电流到0~3V电压的转换。
3.5 模拟滤波电路
汽车在运动过程中由于车体本身的震动和点火线圈产生的高压干扰信号都会影响数据的正常采集,该高压干扰信号通常用低通滤陷器和电源去耦滤除,而由于车体本身的震动产生干扰信号必须用陷波电路,陷波电路如图4所示。
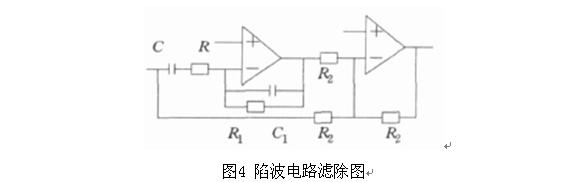
如图2和3所示的右半部分即为模拟滤波电路部分。电路中采用了简单的RC低通滤波电路,截止频率由公式f=1/2πRC得到,实验证明该低通滤波电路已能够满足电路滤波要求。
3.6 A/D采集部分
我们选的DSP(TMS320C2812)内含一个12位分辨率的、具有流水线结构的模-数转换器。此转换器的模拟电路包括:前端模拟多路复用器(MUXs)、采样-保持电路(S/H)、转换核、电压调节器以及其他模拟支持电路。数字电路包括:可编程转换序列发生器、转换结果寄存器、模拟电路接口、设备外围总线接口以及其他片上模块接口等。
该ADC模块功能包括:它是一个12位的ADC核,内置双采样-保持器(S/H);可以选用序列采样模式或者并发采样模式;模拟输入范围为0~3V;快速的转换时间,可以运行在25MHz、ADC时钟或12.5MSPS;16通道输入,多路选择输入,满足我们的4通道要求;自动序列化即在单一时间段内最大能提供16个自动A/D转换,每个转换可编程对16个输入通道中的任何一个进行选择;16个转换结果寄存器(分别设定地址)保存转换数值。输入模拟电压的数字值为
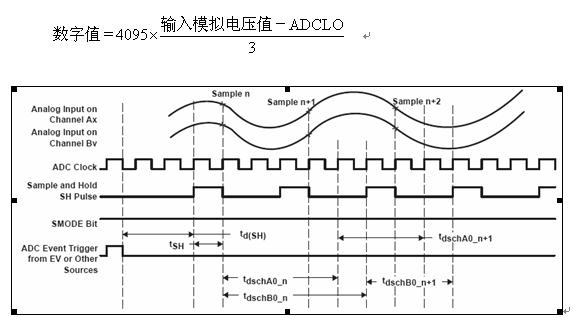
图5 并发采样模式(SMODE=1)
系统中,我们选择并发采样模式,图5所示为并发采样模式的时序图,在该模式下,可以同时进行一对模拟数据的采样转换, CONVxx寄存器的最高位MSB被舍弃。每个采样-保持缓冲器对有关引脚进行采样,此引脚偏移量由CONVxx寄存器的低3位提供。例如,如果CONVxx寄存器包含的值为0110b,则S/H-A对ADCINA6进行采样,S/H-B对ADCINB6进行采样。S/H-A中的电压值首先转换,接着转换S/H-B中的电压。S/H-A的转换结果放在当前寄存器,S/H-B的转换结果放在紧接着的下一个寄存器ADCRESULTn中,然后寄存器指针加2。
3.7 存储部分
由于我们规定:每秒钟对信号采集一次,并进行处理存储,因此系统中需要容量较大的存储器。系统中我们选用ATMEL公司的AT45DB321C存储芯片存储的主要芯片,该芯片是一个容量达到32M的Data Flash存储器,采集到的信号经过处理后不断通过SPI接口传送到45DB321芯片中存储。
TMS320F2812芯片与Flash存储器的通信采用SPI接口方式,接口电路如图6所示,数据传输率为25MHz(位/秒)。本设计中,DSP工作在SPI主机模式,SPI总线的数据传输都将由DSP发起。首先对SPI相关SFR SPICTL寄存器、SPICCR寄存器进行配置,使其工作在4线主模式。通信时首先选择Flash从器件,随后通过读取SPIDAT来进行读写操作。在使用Flash芯片进行读写操作时,首先要确定Flash存储器的状态。可通过写入D7H命令,读取状态寄存器判断设备是否Ready或处于Busy状态。确定状态后,可根据数据手册中的命令格式进行相关的读写以及擦除操作。
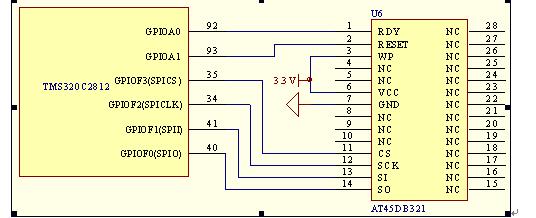
图6 TMS320C2812与45DB321的硬件接口电路
3.8 报警电路设计
系统中,我们选用了一个简单的LED来报警,当汽车与前后测量的距离小于某个下限时,LED就会以一定的频率闪烁,产生报警。
四、 系统应用软件设计
4.1 软件总体结构
软件总体结构如图7所示。
编程所采用的软件环境是CCS公司开发的基于2000系列的开发环境CCS2000,整个运动状态信号数据采集的软件采用模块化结构,以便于维护和扩充,该软件主要包括初始化、动态校零、采样、模数转换、SPI通信存储管理、LED闪烁报警等常规模块,还包括运动状态信号数据预处理的专用滤波软件模块。如汽车的高压点火产生的干扰滤波及漂移滤波等。软件中还包含了由加速度信号转换到速度信号和位置信号的一系列算法。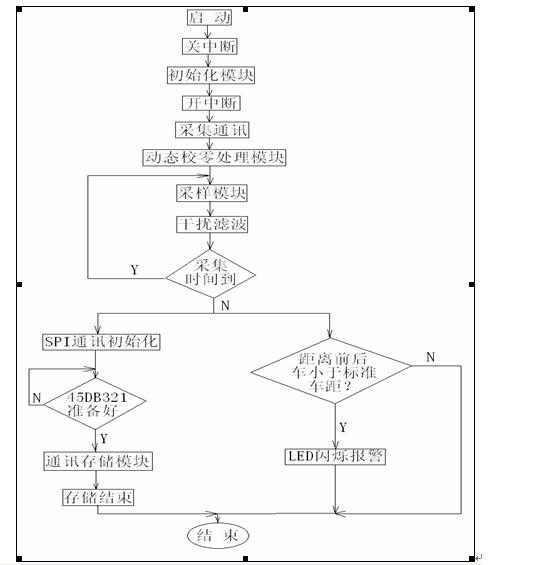
五、 结束语
应用DSP实现的运动信号数据采集器可以方便地采集并记录每一时刻的运行记录。克服了引线的麻烦,通过硬件和软件所采用的有关技术显著地改善了所采集运动信号的品质,该智能运动状态检测数据采集器运行稳定,能耗低,相信具有良好的应用前景。
用户5445 2009-5-7 10:03
用户773046 2009-1-17 08:49
用户1365794 2008-12-28 14:15
用户1302564 2008-12-27 09:33
用户1377241 2008-12-24 09:42
用户1365794 2008-12-23 21:25
用户1365794 2008-12-23 21:25
用户1601743 2008-12-23 15:44
用户1365794 2008-12-22 11:19
用户1400805 2008-12-22 09:45