这几天在做误差放大器的稳定性和性能分析,看了一些文档,大概说一下:
在这里cmg兄前几年前就开了一个帖子,把控制电源的稳定性试图分析清楚,可以我看着回帖的人有点多,而且计算和仿真是脱节的,因此我觉得有点乱。
http://www.dianyuan.com/bbs/d/17/4745.html
以前是看过TI的Tim Green(以前是BB的,后来TI兼并了BB)的运放稳定性,其实这都是同一个问题,即控制环路稳定性,我试图把推导和仿真结合在一起,在一个文档里面分析,通过最直接的模型分析法,得出结论。
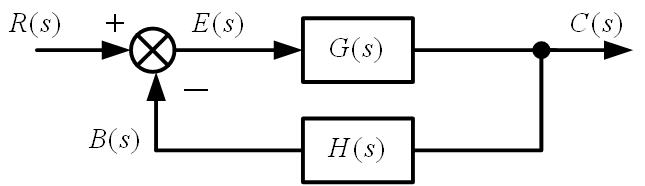
总的来说,运放电路和电源环路都脱不开控制系统基本模型:

对于开关电源来说,链路相对来说比较复杂一些,按照cmg的划分:
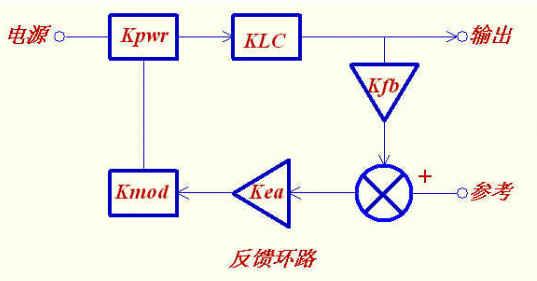
来考虑稳定性,我们一般把稳定性判据都
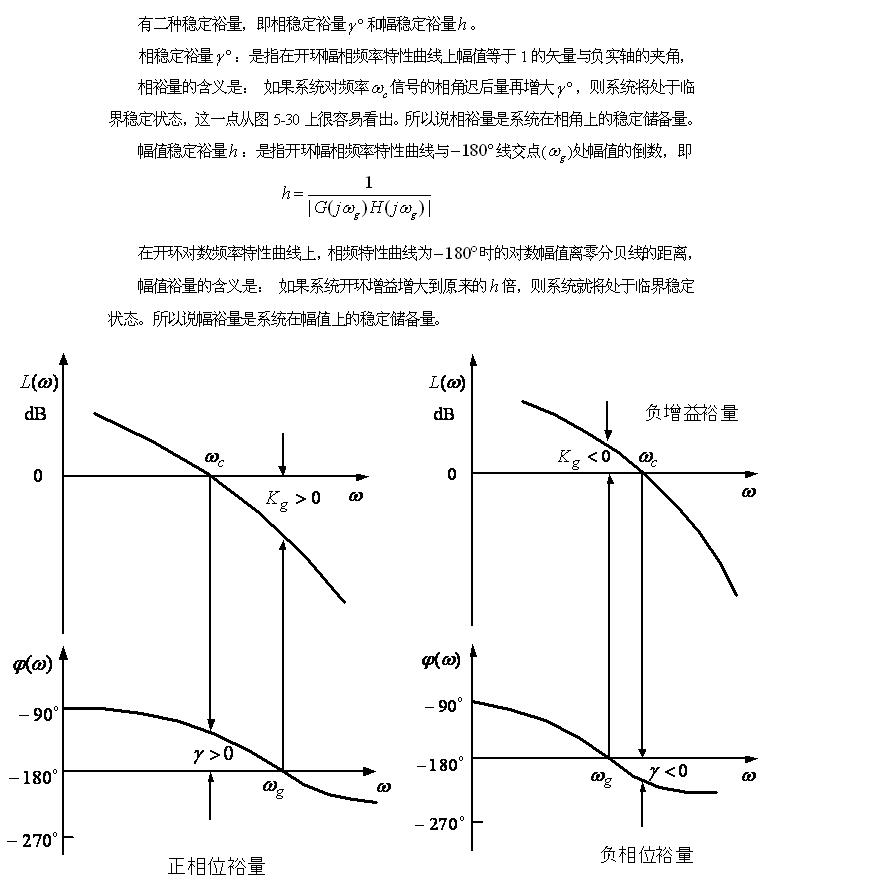
在增益为1时(0dB)整个环路的相移小于360度,环路就是稳定的.这其实是有出处的,我们把它简化单独提出来。
我们首先要定义这是线性系统:
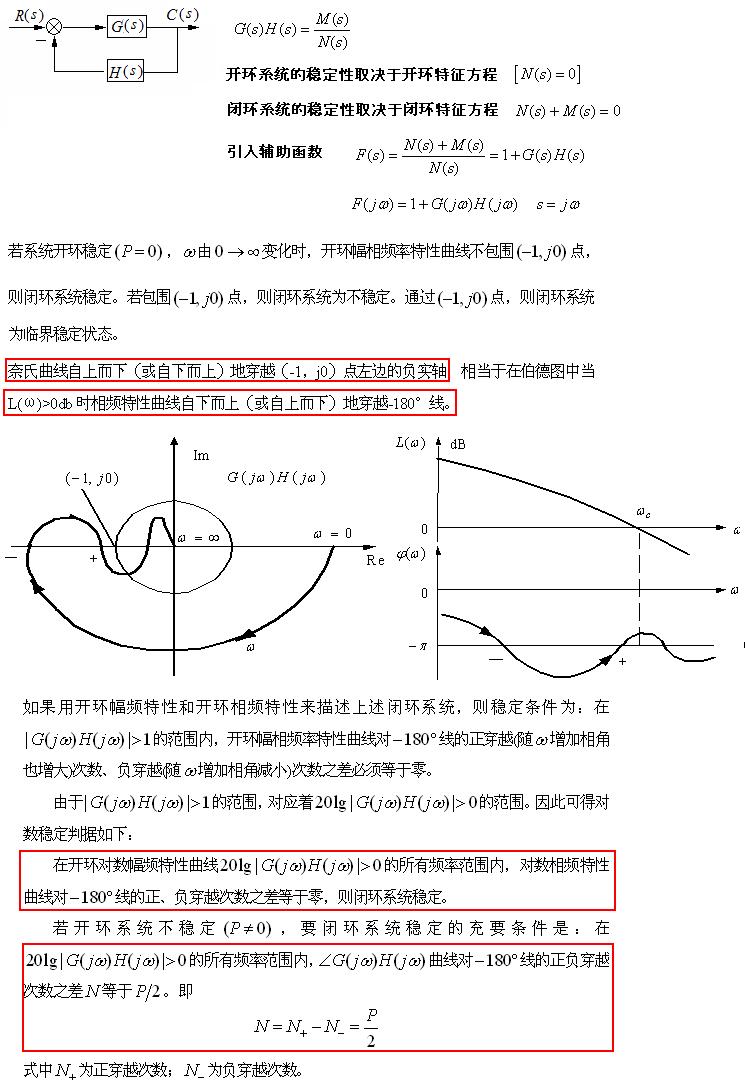
闭环系统稳定的充分必要条件是:所有的闭环极点位于s平面的左半平面或者说特征方程的根都必须具有负实部。可以使用求特征方程和根轨迹的方法求解,这个比较麻烦。
在频域判据中,乃奎斯特判据就是我们最重要的使用手段。
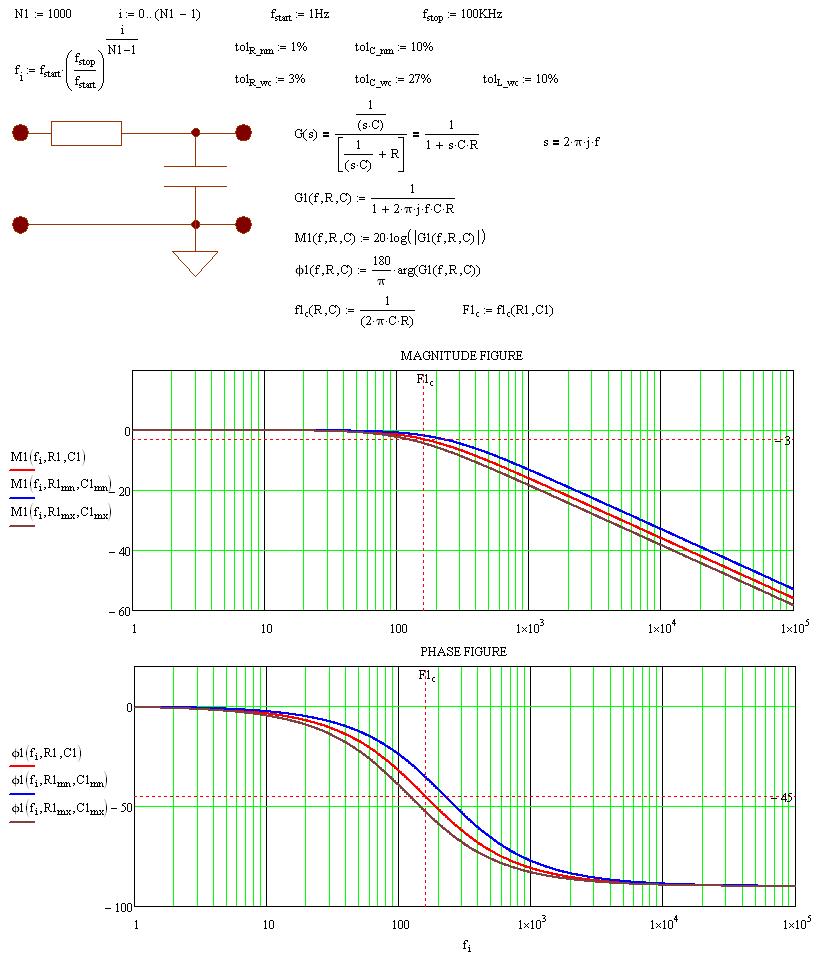
这些都比较理论一些,下面介绍一下在Mathcad里面如果去做Bode图:
一阶极点图:
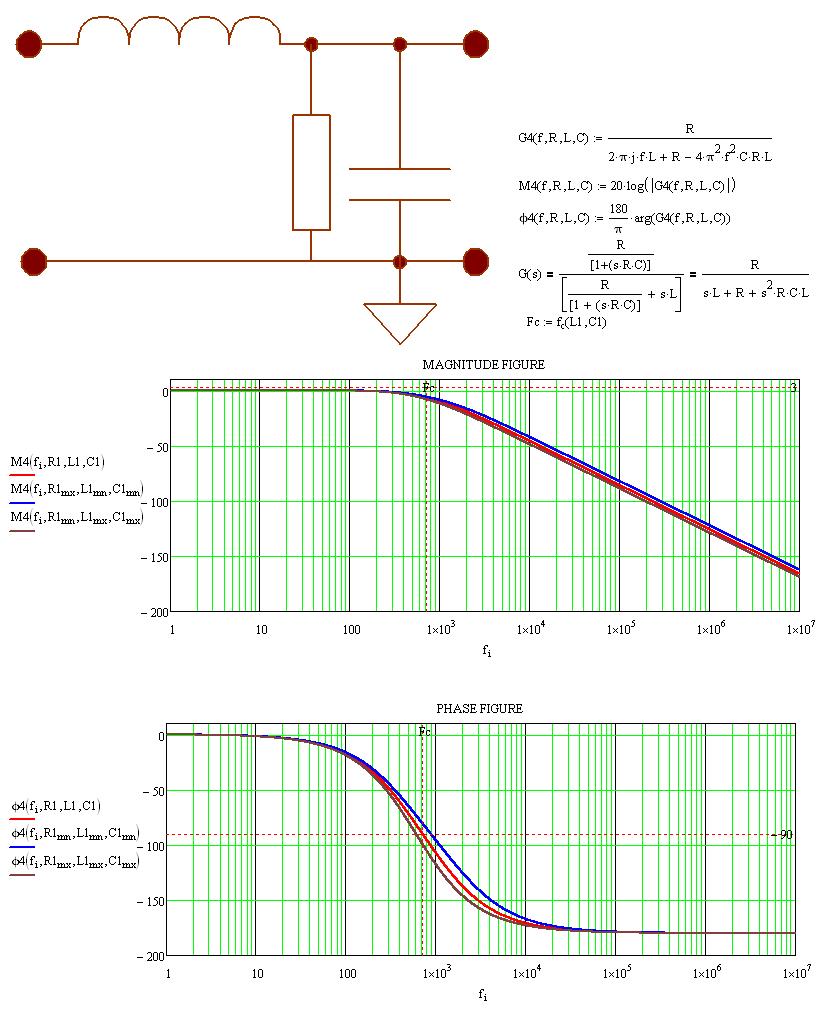
二阶极点图:
一阶零点:
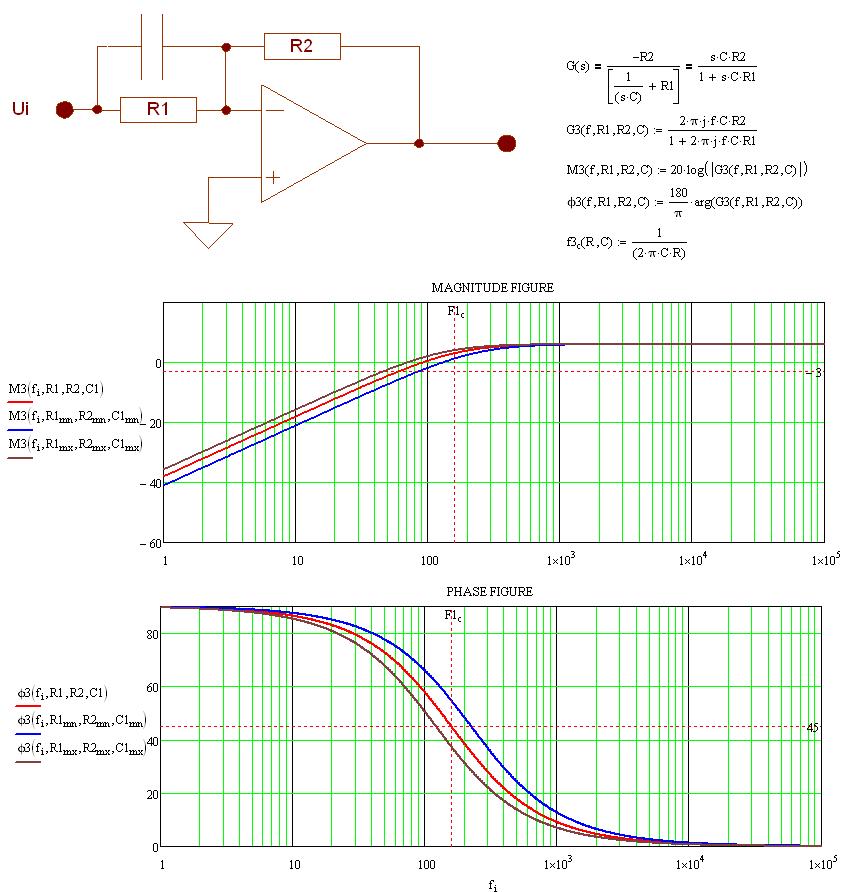



 /2
/2 





文章评论(0条评论)
登录后参与讨论