首页
论坛
电子技术基础
模拟技术
可编程器件
嵌入式系统与MCU
工程师职场
最新帖子
问答
版主申请
每月抽奖
商城免费换礼
社区有奖活动
博客
下载
评测
视频
文库
芯语
资源
2025泰克杭州测试论坛
2025中国低空经济产业创新发展大会
【直播】芯片设计工艺仿真全解析
西门子数字化工业软件资源中心
嵌入式设计资源库
智能楼宇/家电控制应用全解析
在线研讨会
EE直播间
小测验
白皮书
行业及技术活动
杂志免费订阅
免费在线工具
厂商资源中心
论坛
博文
电子工程专辑
电子技术设计
国际电子商情
资料
白皮书
研讨会
芯语
文库
登录|注册
登录
eeNick
明星博主
修改
文章:
17
阅读:
67656
评论:
45
赞:
453
好友
私信
个人主页
文章
17
原创
0
阅读
67656
评论
45
赞
453
原创
详解无刷直流电动机
2019-4-12 11:46
5554
33
11
分类:
机器人/ AI
电气设备通常具有至少一个用于使物体从其初始位置旋转或移位的电动机。市场上有各种类型的电机,包括感应电机,伺服电机,直流电机(有刷和无刷)等。根据应用要求,可以选择特定的电机。然而,目前的趋势是大多数新设计正朝着无刷直流电机发展,通常称为BLDC电机。
本文将集中讨论BLDC电机设计的以下几个方面:
BLDC电机的结构
BLDC电机的操作
扭矩和效率要求
与感应和有刷直流电机的比较
BLDC电机的选择标准
电机控制 - 速度,位置和扭矩,将在本文第二部分中介绍。
施工
无刷直流电动机在结构和工作原理方面与交流感应电动机和有刷直流电动机有许多相似之处。与所有其他电机一样,BLDC电机也有转子和定子。
定子
与感应交流电动机类似,BLDC电动机定子由叠层钢制成,堆叠起来以承载绕组。定子中的绕组可以布置成两种模式; 即星形图案(Y)或三角形图案(Δ)。两种模式之间的主要区别在于Y模式在低RPM下提供高扭矩,而Δ模式在低RPM下提供低扭矩。这是因为在Δ配置中,一半的电压施加在未被驱动的绕组上,因此增加了损耗,进而增加了效率和转矩。
定子中的钢制叠片可以开槽或无槽,如图2所示。无槽铁芯具有较低的电感,因此可以以非常高的速度运行。由于叠片堆中没有齿,因此对齿槽转矩的要求也会降低,因此也使它们成为低速的理想配合(当转子上的永磁体和定子上的齿相互对齐时,由于两者之间的相互作用,产生不希望的齿槽转矩并导致速度波动。无槽芯的主要缺点是成本较高,因为它需要更多的绕组来补偿更大的气隙。
正确选择用于定子结构的层压钢和绕组对于电动机性能至关重要。选择不当可能会在生产过程中导致多个问题,从而导致市场延迟和设计成本增加。
转子
典型BLDC电机的转子由永磁体制成。根据应用要求,转子中的极数可以变化。增加极数确实可以提供更好的扭矩,但代价是降低最大可能的速度。
影响最大扭矩的另一个转子参数是用于构造永磁体的材料; 材料的磁通密度越高,扭矩越高。
工作原理和运作
BLDC电机工作的基本原理与有刷直流电机相同; 即内轴位置反馈。在有刷直流电机的情况下,使用机械换向器和电刷实现反馈。使用BLDC电机,可以使用多个反馈传感器实现。最常用的传感器是霍尔传感器和光学编码器。
注意:霍尔传感器采用霍尔效应原理,当载流导体暴露在磁场中时,电荷载体会受到基于导体两侧产生的电压的作用力。
当转子开始移动时,该扭矩达到最大值,但随着两个磁场彼此对齐,它会减小。因此,为了保持扭矩或建立旋转,定子产生的磁场应保持切换。为了赶上定子产生的磁场,转子将继续旋转。由于定子和转子的磁场都以相同的频率旋转,因此它们属于同步电动机的范畴。
定子的这种切换以建立旋转被称为换向。对于三相绕组,换向有6个步骤; 即,6种独特的组合,其中电动机绕组将被激励。
用于实现BLDC电机的驱动
电路
和波形将在本文的第二部分中讨论。
扭矩和效率
对于电动机的研究,扭矩是一个非常重要的术语。根据定义,扭矩是力使物体绕其轴线旋转的趋势。
因此,为了增加扭矩,必须增加任何一个力 - 这需要更强的磁铁或更大的电流 - 或者必须增加距离 - 这将需要更大的磁铁。效率对于电机设计至关重要,因为它决定了功耗。更高效的电动机还需要更少的材料来产生所需的扭矩。
哪里,
已经理解了上面提供的方程,理解速度与扭矩曲线变得很重要。
以下是图5中所示图表的内容:
随着速度的增加,扭矩减小(考虑到输入功率是恒定的)。
当速度是“空载”速度的一半并且扭矩是失速扭矩的一半时,可以提供最大功率。
应用
单速 - 对于单速应用,感应电机更合适,但如果必须保持速度随负载的变化,则由于BLDC电机的平坦速度 - 转矩曲线,BLDC电机非常适合这样的应用。
可调速 - BLDC电机更适合此类应用,因为变速感应电机还需要额外的控制器,从而增加了系统成本。由于定期维护,有刷直流电机也将是一种更昂贵的解决方案。
位置控制 - 不需要精确控制,如电磁炉和低维护; BLDC电机也是这里的赢家。然而,对于这样的应用,BLDC电机使用光学编码器,并且需要复杂的控制器来监控扭矩,速度和位置。
低噪声应用 - 已知有刷直流电机会产生更多的EMI噪声,因此BLDC更适合,但BLDC电机的控制要求也会产生EMI和可听噪声。然而,这可以使用磁场定向控制(FOC)正弦BLDC电机控制来解决。
如果磁场方向反转,产生的电压也会反转。对于BLDC电机中使用的霍尔效应传感器,无论何时转子磁极(N或S)通过霍尔传感器附近,它们都会产生高或低电平信号,可用于确定轴的位置。
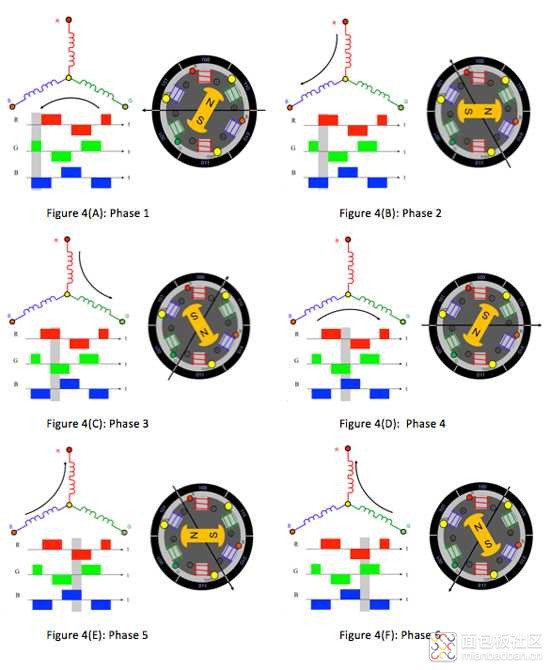
在换向系统中 - 基于使用反馈传感器识别的电机位置的换向系统 - 三个电绕组中的两个一次通电,如图4所示。
在图4(A)中,标记为“001”的绿色绕组被激励为NORTH极,标记为“010”的蓝色绕组被激励为南极。由于这种激励,转子的南极与绿色绕组对齐,而北极与标有“100”的RED绕组对齐。为了移动转子,“RED”和“BLUE”绕组沿图4(B)所示的方向通电。这使得RED绕组成为NORTH极,蓝色绕组成为南极。由于排斥(红色绕组 - 北 - 北对准)和吸引力(蓝色绕组 - 北 - 南对准)的发展,定子中的磁场的这种移动产生扭矩,其使转子沿顺时针方向移动。
当转子开始移动时,该扭矩达到最大值,但随着两个磁场彼此对齐,它会减小。因此,为了保持扭矩或建立旋转,定子产生的磁场应保持切换。为了赶上定子产生的磁场,转子将继续旋转。由于定子和转子的磁场都以相同的频率旋转,因此它们属于同步电动机的范畴。
定子的这种切换以建立旋转被称为换向。对于三相绕组,换向有6个步骤; 即,6种独特的组合,其中电动机绕组将被激励。
用于实现BLDC电机的驱动电路和波形将在本文的第二部分中讨论。
扭矩和效率
对于电动机的研究,扭矩是一个非常重要的术语。根据定义,扭矩是力使物体绕其轴线旋转的趋势。
因此,为了增加扭矩,必须增加任何一个力 - 这需要更强的磁铁或更大的电流 - 或者必须增加距离 - 这将需要更大的磁铁。效率对于电机设计至关重要,因为它决定了功耗。更高效的电动机还需要更少的材料来产生所需的扭矩。
哪里,
已经理解了上面提供的方程,理解速度与扭矩曲线变得很重要。
以下是图5中所示图表的内容:
随着速度的增加,扭矩减小(考虑到输入功率是恒定的)。
当速度是“空载”速度的一半并且扭矩是失速扭矩的一半时,可以提供最大功率。
应用
单速 - 对于单速应用,感应电机更合适,但如果必须保持速度随负载的变化,则由于BLDC电机的平坦速度 - 转矩曲线,BLDC电机非常适合这样的应用。
可调速 - BLDC电机更适合此类应用,因为变速感应电机还需要额外的控制器,从而增加了系统成本。由于定期维护,有刷直流电机也将是一种更昂贵的解决方案。
位置控制 - 不需要精确控制,如电磁炉和低维护; BLDC电机也是这里的赢家。然而,对于这样的应用,BLDC电机使用光学编码器,并且需要复杂的控制器来监控扭矩,速度和位置。
低噪声应用 - 已知有刷直流电机会产生更多的EMI噪声,因此BLDC更适合,但BLDC电机的控制要求也会产生EMI和可听噪声。然而,这可以使用磁场定向控制(FOC)正弦BLDC电机控制来解决。
在了解了本文第一部分中BLDC电机的结构和基本工作原理后,了解可用于电机可靠运行和保护的电机控制选项变得非常重要。 根据所服务的功能,电机控制可分为以下几类:
速度控制
扭矩控制
电机保护
这些控制功能的实现需要监视一个或多个电动机参数,然后采取相应的动作来实现所需的功能。在深入了解这些控制功能实现的细节之前,了解构建电机旋转或建立换向所需的逻辑和硬件的实现非常重要。
换位实施
如本文前面部分所述,基于电机的位置(使用反馈传感器识别),三个电气绕组中的两个一次通电。为了能够激励绕组,外部
电路
需要能够满足电动机的电流要求。具有三相绕组连接的典型控制电路如图1所示.V1,V3,V5和V2,V4,V6使三相电压源逆变器连接在
电源
两端。V1和V4形成一个桥。V1为高压侧,与高压直流电源相连,而V4为低压侧,与地相连。
通过调节功率器件的高侧和低侧(通过信号V1H,V3H,V5H和V2L,V4L,V6L),可以控制流过定子绕组的电流。例如,如果电流必须流入RED绕组并从蓝色绕组流出,则在保持其他信号的同时接通V1和V6将使电流沿所需方向流动,如图2(A)所示。接下来,通过接通V5和V6并关闭所有其他信号,可以切换电流从绿色绕组流出并从蓝色绕组流出,如图2(B)所示。
按照相同的步骤,可以生成BLDC电机的6步驱动顺序。表1提供了基于霍尔传感器输出的电源电路的切换顺序。
但是,如果必须反转旋转,则序列也需要反转。 图3显示了激励波形,包括相电流,相电压,霍尔传感器和扇区值。图的上半部分显示了三相绕组激励电流和电压,其中黑线是相电流,而绿线,红线和蓝线是相电压。由于相电流是梯形的,我们称之为6步BLDC控制梯形控制。
霍尔传感器和激励具有固定的关系。通常,有两种类型的霍尔传感器。对于第一种类型,对于每个HALL阶段,它们的波形具有60度的时间推移。对于第二种类型,波形延时为120度。
通过对换向的基本了解,现在让我们切换到控制功能的实现,这对任何电机设计都至关重要。
速度控制
遵循给定顺序的换向序列有助于确保电动机的正确旋转。那么,电动机速度取决于所施加电压的幅度。通过使用脉冲宽度调制(PWM)来调整所施加信号的幅度。图4显示了各种功率器件的开关信号。
从上图可以注意到,使用PWM驱动较高侧晶体管。通过控制PWM信号的占空比,可以控制施加电压的幅度,这反过来将控制电动机的速度。为了能够平稳地达到所需的速度,PI控制回路的实现如图5所示。
将所需速度和实际速度之间的差值输入PI控制器,PI控制器然后根据由实际速度和所需速度之间的差值获得的误差信号调制PWM的占空比。
扭矩控制
在各种应用中,扭矩控制很重要,在给定的时间点,电机需要提供特定的扭矩,而不管电机运行的负载和速度如何变化。可以通过调节磁通量来控制扭矩,但是磁通计算需要复杂的逻辑。然而,磁通量取决于流过绕组的电流。因此,通过控制电流,可以控制电动机的转矩。
图6显示了扭矩控制实现逻辑。通过保持流过绕组的电流,可以控制扭矩。可以实现类似于用于控制速度的PI回路,以随着负载的变化平滑扭矩响应曲线。
电机保护
在电机控制设计中,必须具有保护逻辑以确保系统的安全运行。例如,当电动机卡住时,通过绕组的电流可以累积到非常高的水平,这可以燃烧驱动电动机的动力装置。
峰值电流 -这是允许流过绕组以确保安全运行的最大瞬时电流。这种情况发生在短路的情况下。只要电流超过峰值电流限制,就会应用硬件保护来消除PWM输出。
最大工作电流 -这是电机停转或过载时的最大输出电流。该电流可由应用固件控制。该逻辑的实现类似于转矩控制。
欠压 - 当系统使用电池运行时,如果电池电压低于特定限制,则切断电源变得非常重要。由于电压降是一个缓慢的过程,因此可以通过固件进行控制。
霍尔传感器故障 - 在基于传感器的BLDC电机中,电机的旋转完全基于从霍尔传感器获得的反馈。因此,在霍尔传感器发生故障的情况下,换向序列将断开,这可能导致BLDC电动机卡住并且电流升高到特定极限以上。通过检查霍尔传感器信号是否改变其逻辑电平,可以在固件中检测霍尔传感器故障。如果它卡在特定的水平上,则可以将其检测为故障,并且可以断开电动机驱动器,使其在惯性下运行或通过施加制动器来停止。要采取的行动取决于设计的要求。
市场上有控制器可以进行BLDC电机控制。随着片上系统(SOC)控制器的出现,用于实现BLDC电机控制的完整控制逻辑可以在单个器件中实现。这不仅有助于降低成本,而且这种集成提供了灵活性,使设计人员能够根据特定应用的要求管理系统的控制。
图7显示了使用赛普拉斯旗舰控制器可编程片上系统(PSoC) - CY8C24533的电机控制系统的设计。在这种使用霍尔传感器输入的设计中,通过产生PWM信号来控制换向序列。该器件具有内置ADC,放大器(PGA)和比较器(CMP),用于测量电压和电流,以实现速度和转矩控制。PI控制环路在固件中实现,以在CPU上执行。对于过电流保护,比较器(CMP)用于在过电流情况下消除PWM输出。器件内部可用的CMP模块提供内部可编程阈值电压,用于适应各种电流范围内的电机。 CY8C24533
。在这种使用霍尔传感器输入的设计中,通过产生PWM信号来控制换向序列。该器件具有内置ADC,放大器(PGA)和比较器(CMP),用于测量电压和电流,以实现速度和转矩控制。PI控制环路在固件中实现,以在CPU上执行。对于过电流保护,比较器(CMP)用于在过电流情况下消除PWM输出。器件内部可用的CMP模块提供内部可编程阈值电压,用于适应各种电流范围内的电机。该器件还提供对
通信
模块的访问,通信模块可用于实现UART,SPI和I2C等通信协议,以将调试/控制数据传输到主机控制器。
本文提供了用于速度和转矩控制的BLDC电机控制系统的基本实现。它还讨论了保护逻辑的重要性以及如何在给定系统中实现保护逻辑。
写原创有奖励!2025面包板原创奖励正在进行中
最新发表
推荐阅读
明星博主
原创博文
年度排行
博文排行
博文评论
FPGA/CPLD
MCU/ 嵌入式
模拟
电源/新能源
测试测量
通信
智能手机
处理器与DSP
PCB
汽车电子
消费电子
智能硬件
物联网
软件与OS
采购与分销
供应链管理
工程师职场
EDA/ IP/ 设计与制造
无人机
机器人/ AI
医疗电子
工业电子
管理
写博文
点赞(
33
)
收藏
分享到:
上一篇:
PCB设计规范核心说白了就两点:“怎么摆”和“怎么连”!
下一篇:
MOS管为什么可以防止电源反接?
PARTNER CONTENT
换一换>
更多>
文章评论
(
4
条评论)
登录
后参与讨论
您需要登录后才可以评论
登录
|
立即注册
发布
qiuxuezhe1
2019-8-19 16:14
好资源,很好
回复
curton
2019-5-8 12:23
好资源 学习了
回复
wjx943_536273043
2019-4-25 21:25
喜欢看技术贴
回复
我的果果超可爱
2019-4-16 23:33
我就喜欢看技术贴,汤师爷
回复
查看更多评论
相关推荐阅读
eeNick
2024-01-25 16:56
如何看芯片手册
经常有人问我如何查看芯片手册?我一般会回答,查看关键参数就可以了。其实我知道,这就跟没说一样,对于提问者来说,这没什么用。不过我也没瞎说,只不过这个问题没法一句话回答。这个问题今天就来聊一聊。先看如何...
eeNick
2019-06-14 17:00
【干货】31个EMC标准电路分享!!!
1、AC24V接口EMC设计标准电路2、AC110V-220VEMC设计标准电路3、AC380V接口EMC设计标准电路4、AV接口EMC设计标准电路5、CAN接口EMC设计标准电路6、DC12V接口E...
eeNick
2019-04-29 10:01
详解安规电容:X电容和Y电容的作用以及应用
一、安规电容 安规电容之所以称之为安规,它是指用于这样的场合:即电容器失效后,不会导致电击,也不危及人身安全。安规电容包含X电容和Y电容两种,它普通电容不一样的是,普通电容即使在外部电源断开之后,它...
eeNick
2019-04-29 09:56
如何正确使用隔离放大器
什么是隔离放大器 首先,我们来定义一下什么是隔离放大器。隔离放大器是一种使用高电磁抗扰隔离层将输出和输入电路隔离开的特殊功能放大器。这种干扰也称为EMI,是由外部源造成的,如果忽略,可导致信号链的性...
eeNick
2019-04-29 09:51
MOS管为什么可以防止电源反接?
电源反接,会给电路造成损坏,不过,电源反接是不可避免的。所以,我们就需要给电路中加入保护电路,达到即使接反电源,也不会损坏的目的。 一般可以使用...
eeNick
明星博主
修改
文章:
17
阅读:
67656
评论:
45
赞:
453
好友
私信
个人主页
文章
17
原创
0
阅读
67656
评论
45
赞
453
最新评论
更多
感谢分享,干货万岁
eeNick
评论博文
2025-6-26
柔性电流探头原理和测量中需要注意的问题 ...
是 AI写得吗?要不是的话,这必须得奖励一波E币
eeNick
评论博文
2025-6-26
电源基础原理与工程应用详解
感谢关注
丙丁先生 ...
评论博文
2025-6-26
将CDK项目迁移到Keil中
最新
博文
OptiSystem应用:半导体激光器调制 ...
FRED应用:毛细管电泳系统
FRED应用:手机背光显示
资料下载
本周热帖
太好了!数字示波器的使用方法.pdf ...
经典!图文并茂讲解电快速瞬变脉冲群 ...
超级干货!制作PCB电路板的简明教程( ...
Toshiba东芝电机控制驱动器选型手册-2 ...
厉害!一文整明白交流感应电机的工作 ...
免费报名开启智能 “芯” 未来:2025 ...
什么是共模抑制比?
高频高效的关键:MDD快恢复整流器在开 ...
【富芮坤FR3068x-C】+经典蓝牙音乐A2D ...
《7天造一台无人机》启蒙宝典 ...
最新资讯
芯语最新
感知・驱动・生态全维度赋能——ADI重 ...
一季度全球晶圆代工2.0:台积电独占35 ...
有关于下拉电阻还有很多不懂?这篇文 ...
高效功率器件评估:深度解析功率半导 ...
国台办回应华为中芯等被纳入“出口禁 ...
OLT下部分组播业务黑屏的故障案例 ...
吃尽CS红利?我从小镇做题家,逆袭成 ...
2025智能驾驶行业:智驾地图市场研究 ...
2025年自动驾驶汽车:技术演进及未来 ...
HDC2025|非遗传承×开放合作:华为音 ...
EE直播间
更多
Keysight World Tech Day 线上直播-AI 驱动的超高速传输测试分论坛
直播时间: 06月26日 13:30
全面搞懂介电常数那些事儿
直播时间: 07月03日 10:00
在线研讨会
更多
利用先进精密仪器仪表解决方案,优化研发并加快产品上市
AI 巨型芯片,性能越强,测试越难,如何破局?
Mercury基于展频技术的医疗时钟EMI抑制方案
ST 在大功率热管理系统中的电机控制系统方案(AI 数据中心/暖通空调/电池储能系统/变频制冷)
热门
推荐
自动驾驶的未来在何处?
TI 汽车ADAS全域方案解密
深度剖析:测试电源与光伏储能背后的半导体奥秘
工程师速看!测介电常数,赢取豪华大礼!
我要评论
4
33
分享到微信
分享到微博
分享到QQ
点击右上角,分享到朋友圈
我知道啦
请使用浏览器分享功能
我知道啦
关闭
站长推荐
/4
2025第1期拆解活动:赢示波器、运动相机、热像仪等!
示波器、影石运动全景相机、大疆无人机、高清红外热成像仪;树莓派5等等
【下载】电源设计工程师指南(共542页)
本书共542页,深受设计工程师欢迎,作为硅基与第三代半导体的实用工具书,本手册将成为专业技术人员实现优化功率和小信号开关、电源转换和管理的必备指南。
【2025面包板社区内容狂欢节】发帖/回帖赢25万E币!
活动时间:即日起——2025年全年(发完20万E币为止!)
社区内容发布、审核与管理!
严厉打击刷流量发广告等行为
首页
论坛
电子技术基础
模拟技术
可编程器件
嵌入式系统与MCU
工程师职场
最新帖子
问答
版主申请
每月抽奖
商城免费换礼
社区有奖活动
博客
下载
评测
视频
文库
芯语
资源
2025泰克杭州测试论坛
2025中国低空经济产业创新发展大会
【直播】芯片设计工艺仿真全解析
西门子数字化工业软件资源中心
嵌入式设计资源库
智能楼宇/家电控制应用全解析
在线研讨会
EE直播间
小测验
白皮书
行业及技术活动
杂志免费订阅
免费在线工具
厂商资源中心
帖子
博文
返回顶部
×
















 /4
/4 



qiuxuezhe1 2019-8-19 16:14
curton 2019-5-8 12:23
wjx943_536273043 2019-4-25 21:25
我的果果超可爱 2019-4-16 23:33