
我的一个同学做了一台智能车获了奖,这让我也坐不住了,也想搞一台。因为做智能车很考验水平,很检验能力,涉及模块调试,软硬件调试。初步打算智能车的功能如下:
l 具备自主导航移动,寻迹移动以及遥控移动三种模式
l 能够实时回传小车所在位置的温湿度。
l 用超声波测距避障实现自主移动,用红外对管或CCD摄像头实现寻迹移动,用无线模块NRF24L01通信实现遥控移动。同时温湿度数据的回传也用无线数传模块。因为NRF24L01具备一点对多点通信。
l 暂不考虑回传视频图像,因为图像传输模块的价格有些。。。。
l 控制单元打算先用51单片机STC12C5A60S2,因为上面的资源很多。之后再换成MSP430 。最后试试能不能跑操作系统。
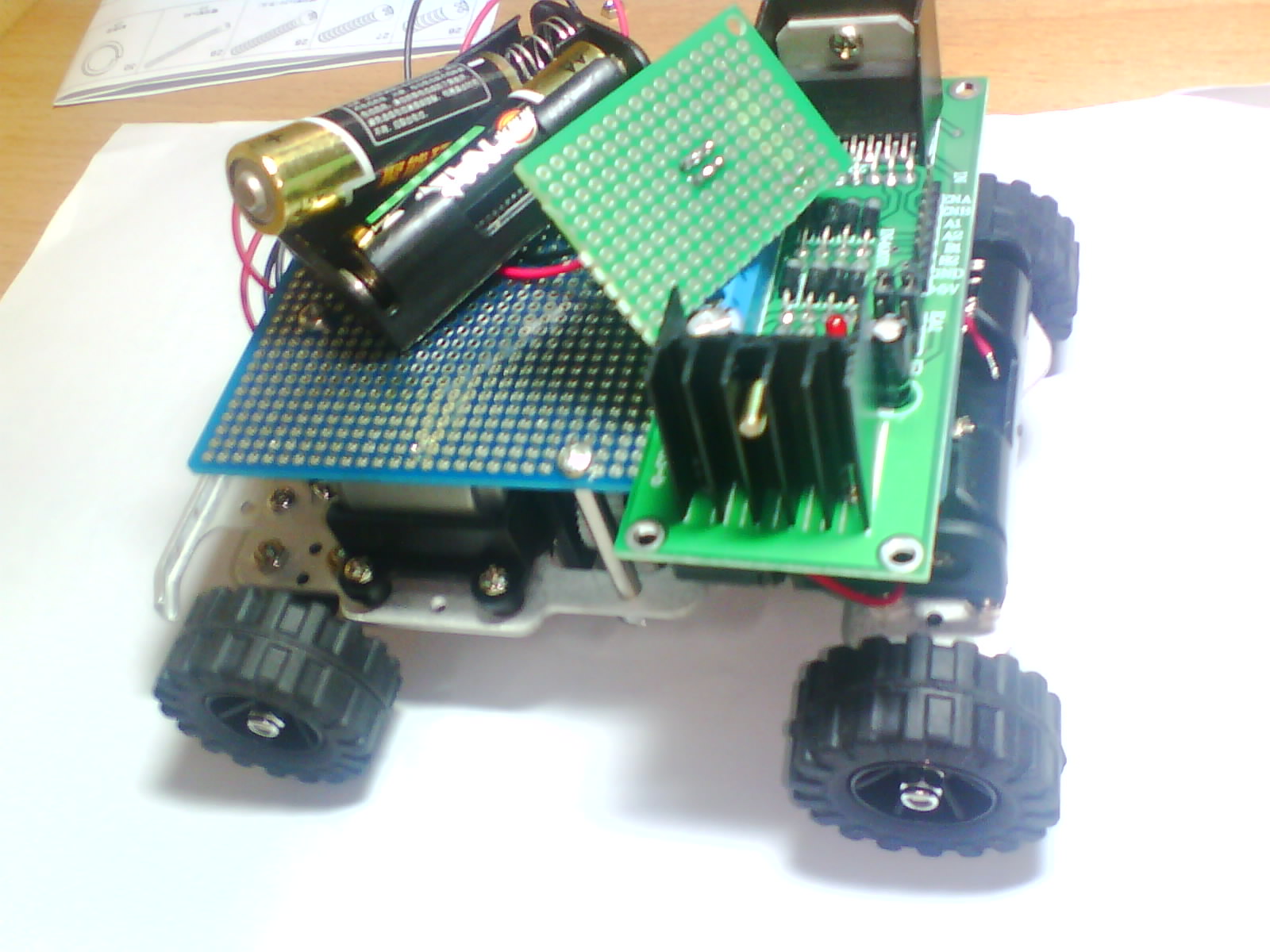
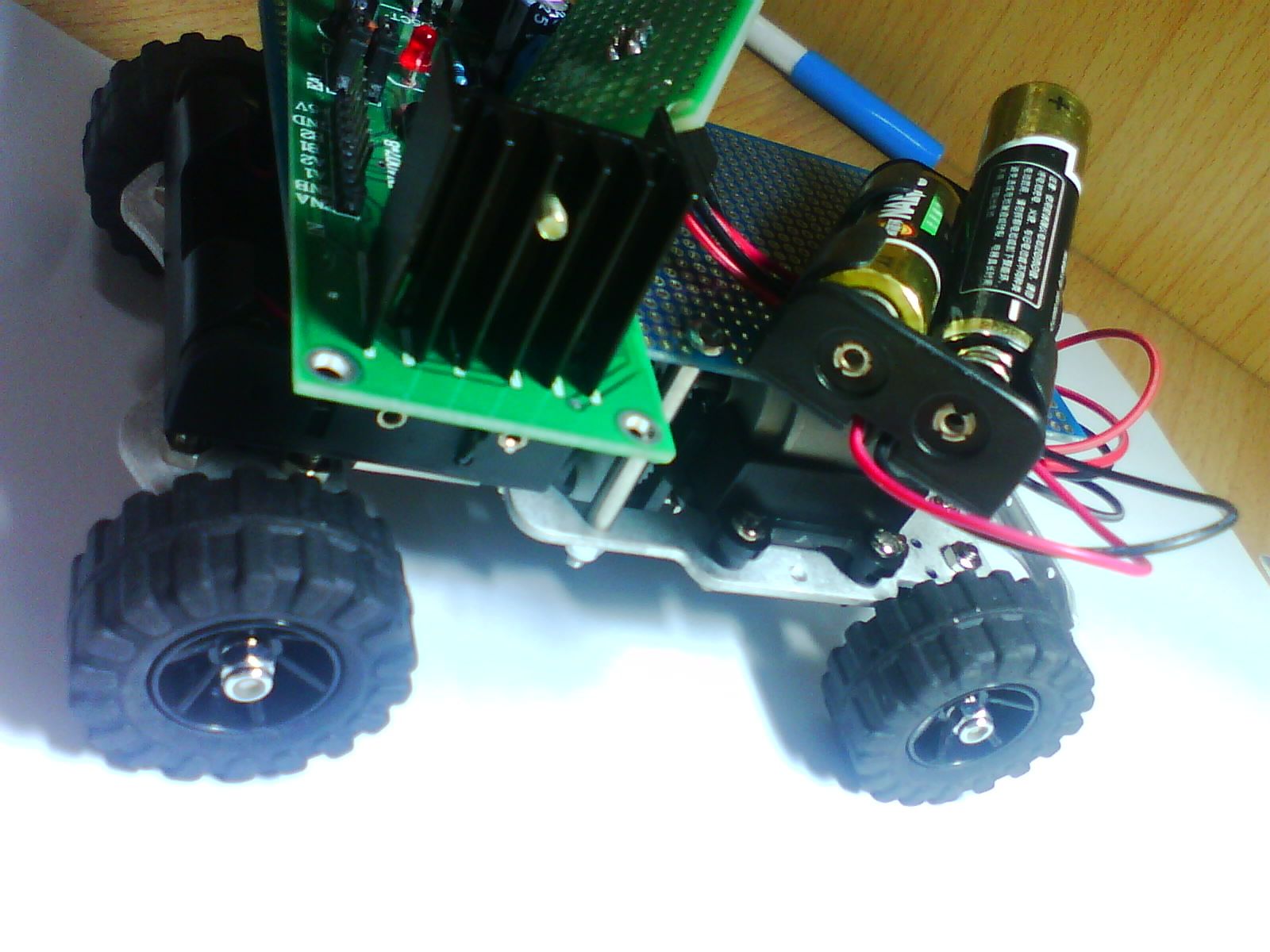
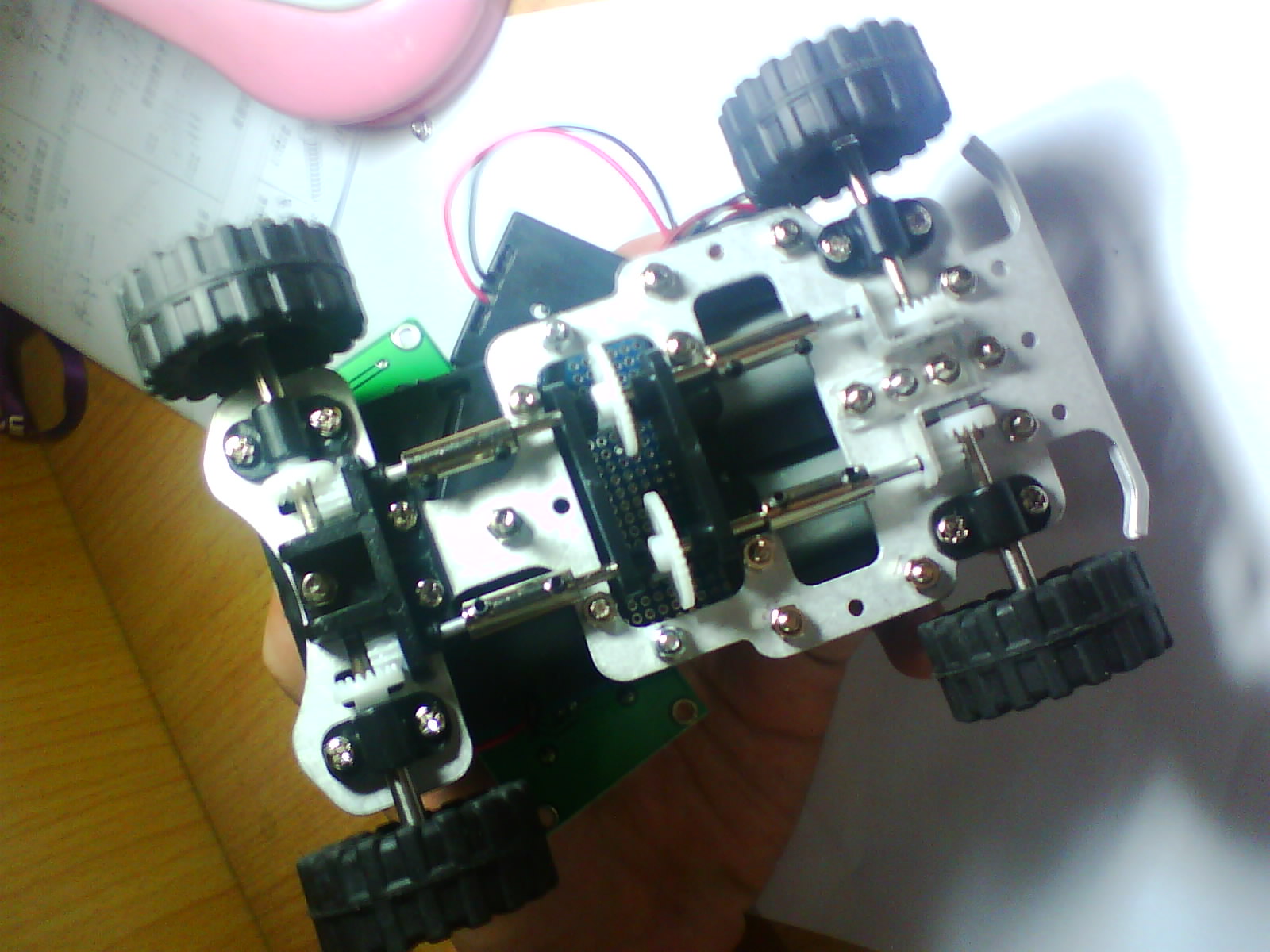
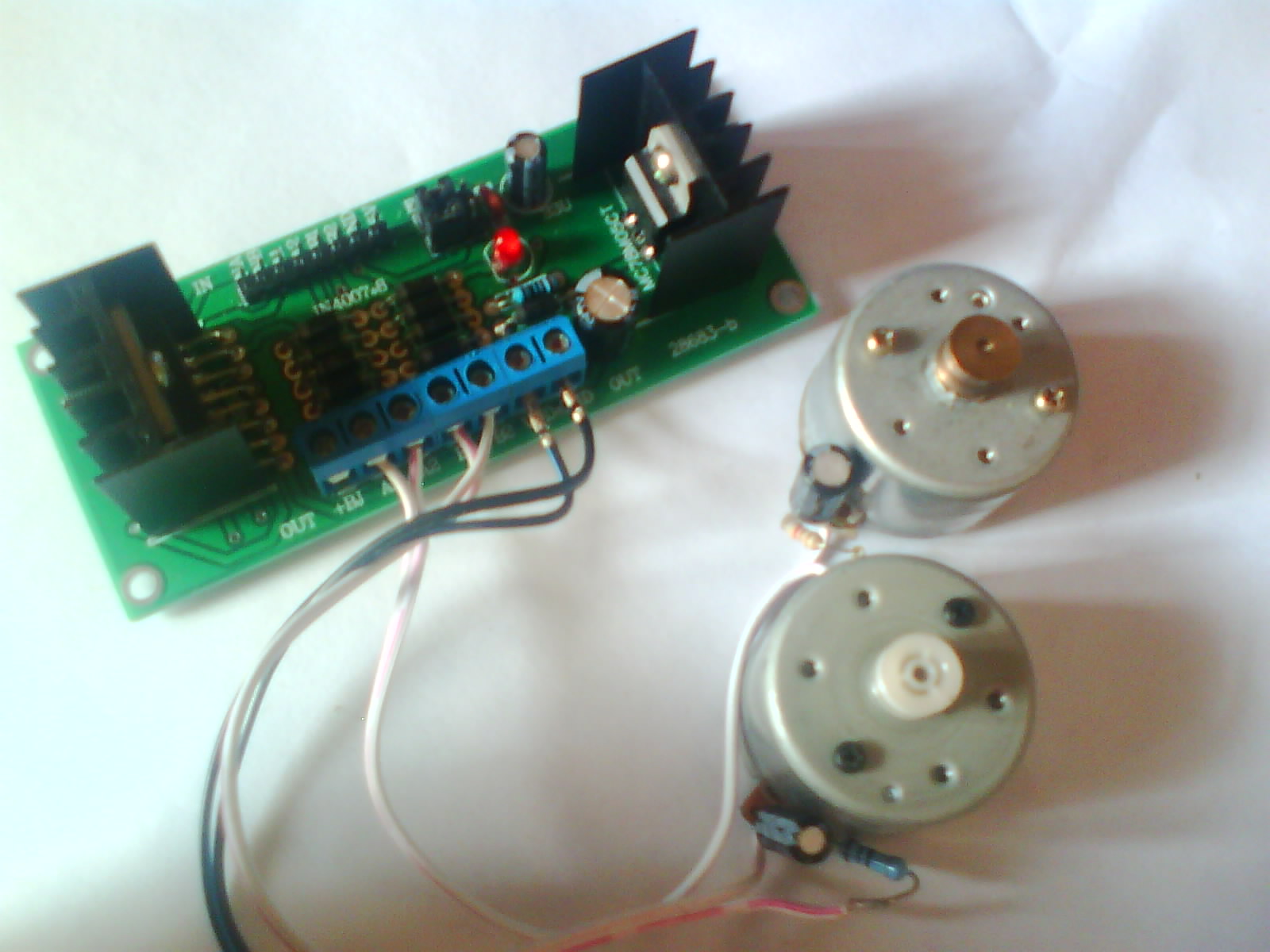
在网上买了一个智能车底盘,四驱的,是散件,我花了几个小时组装起来。还有一个L298驱动模块,能驱动两路直流电机。虽然两件东西花了不少大洋,但还是咬牙忍了。然后初步进行了L298的控制实验,很顺利,觉得298挺好用。省去了自己搭建H桥的麻烦。其实我以前搭建过H桥,用来驱动两路二相四线步进电机的,它也能驱动四路直流电机,可很笨重,放在智能车上很占地方,总之不大合适。预计会在暑假完成制作调试。下面是小车和马达驱动模块的图片。


 /5
/5 






文章评论(0条评论)
登录后参与讨论