
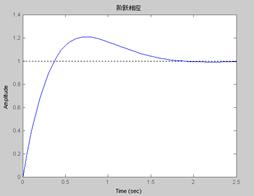
在锁相环中,环路滤波器的阶数和噪声带宽直接决定了环路滤波器对信号的动态响应,减小噪声带宽Bn能减小随机相差,但会增加稳态相差:增大噪声带宽Bn能减小稳态相差,却使随机相差恶化。所以要想选择合适的滤波器参数,就必须选择合理的噪声带宽。在文中,重点是对GPS跟踪系统的两个环路的噪声带宽进行分析。锁相环的阻尼系数不但控制环路滤波器到达稳定状态的时间,同时也控制环路滤波器过冲值的大小。建立时间越小,过冲越大,阻尼系数的选择通常是过冲和建立时间折中的结果。图1是阻尼系数取不同数值时,锁相环的阶跃相应和Bode图,观察阶跃响应图中,当阻尼系数越小时,到达稳定的需要的时间越长,在Bode图中,如果阻尼系数越大,则环路的通带增益显得越为平坦,但是增益的幅度下降的越慢,使得环路对噪声的滤波效果越不理想。本文设计中阻尼系数取![]() =0.707,这是通常认为的最佳值。
=0.707,这是通常认为的最佳值。
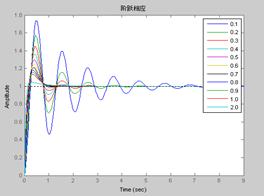
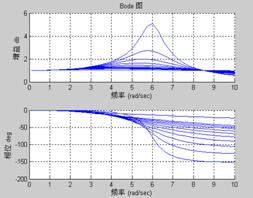
图1 阻尼系数不同时锁相环的阶跃相应和Bode图
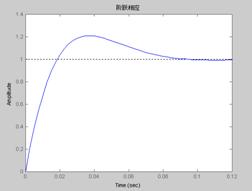
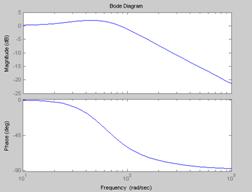
噪声带宽控制着进入环路的噪声量,噪声带宽越窄,越少频率成分的噪声允许进入环路,环路的滤波效果越好,环路对信号的跟踪越精确。相反,如果噪声带宽过小,则由高动态应力导致的载波频率和相位变化中的有用高频信号成分有可能会当做噪声一起被滤除。本文设计中,因为码环跟踪的是时间周期较长的信号,所以它的带宽比载波环要窄。在经过不断的实验后,载波环噪声带宽取60Hz,码环噪声带宽取3Hz。图2是噪声带宽取60Hz和3Hz时锁相环的阶跃相应图和Bode图。
(a)噪声带宽Bn=60Hz
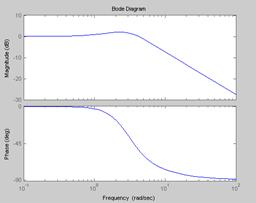
(b) 噪声带宽Bn=3Hz
图2 噪声带宽不同时锁相环阶跃响应和Bode图
环路的固有频率(此处的公式推导要参考另一篇博文)
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
可以得到载波环和伪码环系数C1和C2的值。
跟踪环路的频率牵引范围相当于快捕带,要保证初始频差落于快捕带内。快捕带公式为
![]() (4)
(4)
本文设计中,积分时间ts取1ms,积分时间越长,相关积分输出的信号就越强,但对载波误差的容忍度就越差,同时在较长的积分时间越长时发生数据比特跳变的可能性也越大,如果在积分时间内发生比特跳变,就会消减积分的结果。积分时间ts最短不能小于一个C/A码的周期1ms,所以在本文设计中ts取1ms。环路中增益越大,牵引速度就越快,稳态跟踪的精度也就越高。本文设计中,伪码环增益为k0k1=1,载波环增益为k0k1=0.25,根据以上设置的参数和一系列推导公式,求解得跟踪环路中载波环和伪码环的主要参数,表1给出了载波环和伪码环的主要参数。
表1 跟踪环路主要参数设置
|
|
|
|
|
|
|
|
|
|
载波环 |
60 |
0.707 |
0.25 |
113.14 |
160 |
639.9 |
51.2 |
|
伪码环 |
3 |
0.707 |
1 |
5.66 |
8 |
7.999 |
0.032 |
根据表中给出的结果可知,跟踪环路频率牵引的理想范围是160Hz,在实际的设计过程中,考虑到晶振、噪声和环路设计误差等一系列因素,频率牵引范围要要小于160Hz,但相对于精捕后给出-100Hz~100Hz的频差,完全符合设计的要求。
锁相环作为跟踪环路进行跟踪测量时,必然存在着误差。锁相环的相位测量误差源包括相位抖动和动态应力误差,而造成相位抖动的误差源又主要分为热噪声均方差![]() 、机械颤动所引起的振荡频率抖动均方差
、机械颤动所引起的振荡频率抖动均方差![]() 以及艾兰均方差
以及艾兰均方差![]() 三种。总的相位抖动均方差可以估算为
三种。总的相位抖动均方差可以估算为
![]() (5)
(5)
机械颤动所引起的振荡频率抖动均方差![]() 一般取经验值2°。对锁相环跟踪门限的一种保守估计方法是,三倍的相位检测误差均方差必须低于鉴相牵入范围(本文采用的是二象限反正切函数鉴相器,牵引范围是-90°~90°)的四分之一,即
一般取经验值2°。对锁相环跟踪门限的一种保守估计方法是,三倍的相位检测误差均方差必须低于鉴相牵入范围(本文采用的是二象限反正切函数鉴相器,牵引范围是-90°~90°)的四分之一,即
![]() (6)
(6)
其中![]() 表示的是动态应力误差,本文设计中主要讨论热噪声均方差,估算公式为
表示的是动态应力误差,本文设计中主要讨论热噪声均方差,估算公式为
 (7)
(7)
热噪声与环路的阶数无关,而且通过减小噪声带宽Bn可以降低热噪声均方差,但同时会影响到环路的动态性能。Tcoh是相干积分时间,本文设计中,相干积分时间是0.001s。C/N0表示信号的载噪比,如果载噪比越低,那么热噪声均方差越大,这就意味着环路存在着一个C/N0门限值,当信号的C/N0小于这个门限值时,环路就会丧失稳定跟踪该信号的能力,所以一般也称载噪比为锁相环跟踪灵敏度门限值。根据式(6),![]() 的值不得大于15°,求得本文设计中跟踪环路的灵敏度门限值是28.99dB/Hz。
的值不得大于15°,求得本文设计中跟踪环路的灵敏度门限值是28.99dB/Hz。


 /2
/2 





文章评论(0条评论)
登录后参与讨论