
去年,大概这个时间段,我开始在EDN写博客,其实在这以前我也在其他论坛和博客网写些东西,后来我想还是找个技术博客大站来长期保留我的文章,同时也可以分享些东西给其他同仁,于是选择了EDN,哈哈,我的选择应该是正确的,EDN可能是目前国内最大的电子技术博客网了。
一口气居然写了75篇博客文章,我总认为我的效率不高,而且不断被单位和家庭的事务耽搁着,总是感觉捞不到“时间”,但累计下来,一看,还真搞了不少内容。所以光看书本知识,然后推导公式,不实践,瘾不会这大。这一年我以Labview软件积木,Arduino电子积木和LEGO机械积木为主做了一些原型项目实践,一直被强烈的兴趣驱使着,每次开始做实践时并不知道是否成功,经过些小努力,看看成果,还蛮欣慰的。
我想纪念开博一周年,还是做个小实践为好,因为用一些工具去做些桌面环境下的互动作品,以满足自己好奇心,是我写博客做记录的目的。
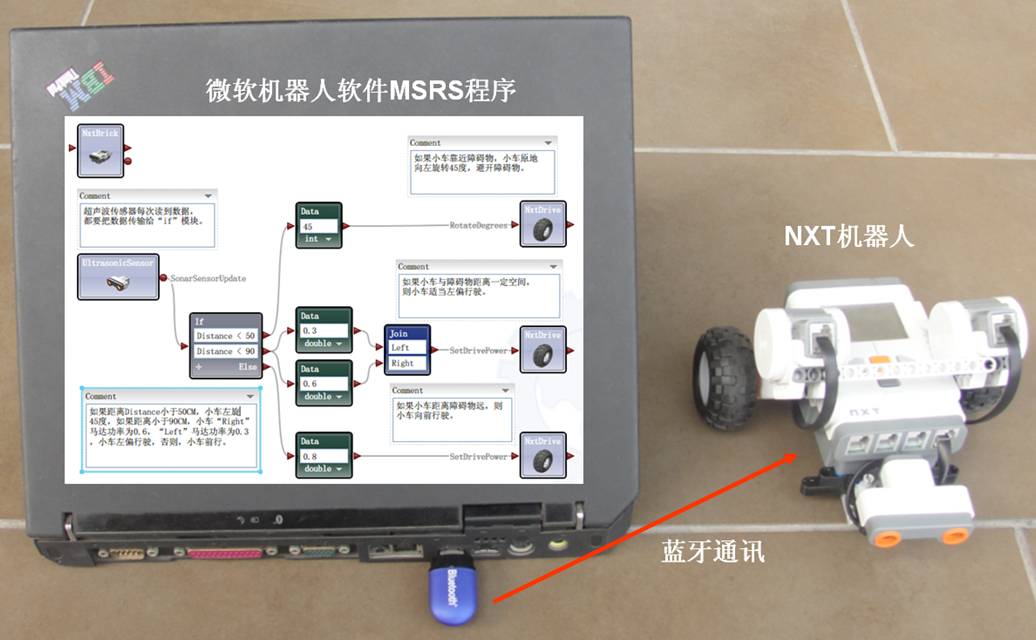
这次互动作品的实践是用微软机器人软件MSRS为NXT蔽障小车编程,蔽障小车到处探索,其上安装的超声波传感器如果探测到障碍物,小车会自动躲开。如果距离小于50CM,小车原地左旋45度,如果距离小于90CM,小车左偏行驶,否则,小车前行。
MSRS软件的编程特点可见博客文章:http://blog.ednchina.com/zhang0309/2124906/message.aspx
程序如下图:
在软件界面右侧的Properties参数栏里,进行小车驱动轮的“NxtDrive”模块的参数设置:两个马达所连接车轮之间的间距,单位为米,DistanceBetweenWheels 轮距:0.145m=14.5cm。左右车轮的直径,单位为米,WheelDiameter 车轮直径:0.055m=5.5cm。DistanceBetweenWheels 和 WheelDiameter 的设置有助于用户通过设定距离参数的方式来精确控制小车的前进距离。
由于NXT电机的安装朝向,你输入“正”的功率值,小车却向反向行驶,MSRS软件考虑到了这个问题,所以在“NxtDrive”模块,只要把用“红圈”标注的“ReversePolarity ”电极反相的“勾”打上即可,默认时是没有这个“勾”的,根据这次实验用小车的电机安装朝向,打“勾”就对了。
下载的我提供程序,可以帮助你搞明白MSRS软件如何编程这次实验任务。
又写了一篇文章,视频里展示了实验成果,感受到了微软公司的高科技,也感受到美国各个科技公司产品互联互通的力量。
我想,在学术期刊上发表几篇论文,到底有多少人看,不知道,我知道的是在EDN博客网写博客,一年的观看人次是:



 /5
/5 







用户428538 2013-3-3 22:00
wangxinfeng6666_749290079 2011-8-31 22:06