
抖动是指数字信号中不期望的相位调制,同时也是衡量高速数字信号质量的最重要的指标。现在各种通信标准都对通信设备的抖动的指标有严格的要求,各种总线的一致性测试中也会对随机抖动、确定性抖动、时间间隔误差、总体抖动等有要求。
示波器是很强大的工具,目前很多windows平台的示波器都提供了一些抖动分析的软件,可以提供直方图、时间图、抖动频谱、RJ/DJ分解、浴盆曲线等一系列漂亮的测试报告。但是事实上,很多用户在使用示波器进行精确抖动测量时却不能得到很好的结果。比如明明要求被测时钟的抖动小于0.5ps RMS,实际测出来却是5ps RMS,数量级的错误使得很多用户开始怀疑测量结果和测量方法的可信程度。
这些错误结果的出现除了部分是由于对抖动概念理解不够从而设置错误外,还有很大一部分原因是不了解所使用的示波器的抖动测量能力,也就是您在使用的这台示波器究竟能测量到多小的抖动,以及和那些因素有关。
衡量示波器实际能测量到的最小的抖动的指标是抖动测量本底(Jitter measurement floor)。如果被测件的实际抖动小于示波器的抖动测量本底,这些抖动是不可能被测量到的。抖动测量本底这个指标和示波器的采样时钟抖动、底噪声以及被测信号都有关系,其表现为示波器对测量结果增加的随机抖动的大小。由于不同示波器厂商用不同的方法定义抖动测量本底,这就要求购买或使用示波器的工程师深入理解不同指标定义的含义。
通常用来衡量示波器抖动测量能力的指标有2个:固有抖动(Intrinsic Jitter)和抖动测量本底(Jitter Measurement Floor)。这2个指标间有关系但又不完全一样,下面就来解释一下。
1、固有抖动
示波器的固有抖动,有时又叫采样时钟抖动,是指由于示波器内部采样时钟误差所造成的抖动。由于现在高带宽示波器的采样时钟频率都非常高,可高达80G/s或者更高,因此要保证每一个实际的采样点都落在其应该在的理想位置是个非常有挑战性的工作。示波器里通常使用专门的芯片或时基系统来保证送给其ADC芯片的采样时钟间精确的时间关系。
以Agilent其90000X示波器为例,其固有抖动是150fs。这里,固有抖动意味着如果不考虑其它因素情况下理论上示波器能够测量到的最小的抖动值。有些厂商把这项指标称为示波器的抖动测量本底,但事实上理论上的固有抖动指标本身并不能准确地告诉工程师这台示波器会给抖动测量带来多大误差。
2、抖动测量本底
事实上示波器都是有底噪声的(这是指幅度上的噪声),同时被测信号的斜率(指被测信号边沿单位时间内电压变化的速度)又不是无穷大的。因此示波器本身的垂直方向的幅度噪声叠加在被测信号上,会引起信号边沿过阈值时刻的时间水平风向的时间变化。也就是说,示波器的底噪声会转换为抖动测量的不确定性。示波器底噪声越大,这个影响越大;同时信号斜率越缓,噪声转换为抖动的比例系数越大。 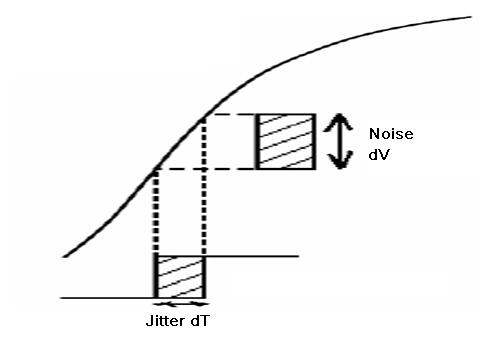
在很多实际的抖动测量里,示波器底噪声和信号斜率对测量结果的影响占主要因素。很多用户在用示波器进行抖动测量时发现增加信号的驱动能力抖动结果会有改善的原因。事实上信号里的抖动可能还是那么大,但是增加驱动能力后信号斜率变陡,示波器底噪声对抖动测量的影响变小从而使测试结果看起来更好。
示波器的抖动测量本底才是真正衡量实际情况下示波器给抖动测量带来的误差的指标,这个指标综合考虑了示波器的采样时钟抖动以及被测信号斜率和示波器底噪声的影响。
以Agilent 的90000X示波器为例,其抖动测量本底指标如下: 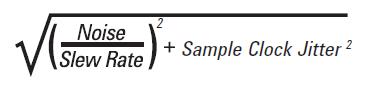
这里,抖动测量本底指标考虑了3个因素:示波器采样时钟抖动、示波器在当前量程下的底噪声和被测信号斜率。
有时示波器厂商只给出了示波器的固有抖动指标(比如200fs),这只是给出了示波器在最理想情况下(信号斜率非常陡)的采样时钟抖动,并不能真实衡量示波器真实的抖动测量能力。相反的,抖动测量本底指标考虑了多方面的影响,从而能够更真实衡量示波器的抖动测量能力。


 /2
/2 






文章评论(0条评论)
登录后参与讨论