
波特图可用于测量增益和频率随频率对数分度的变化。这些测量数据提供了大量有关系统性能的信息,包括稳定性和响应时间。振铃和其它可能性显示在性能曲线中。
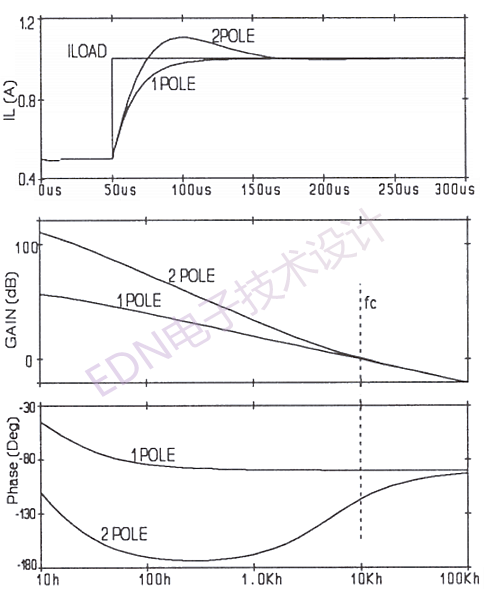
图1:波特图与系统瞬态响应直接相关。
波特图大多可以使用基本的代数来创建。为了做到这一点,我们可通过拉普拉斯变换实现内置的转换,从而简化数学运算。来自Microsemi的降压调节器传递函数如图1所示。
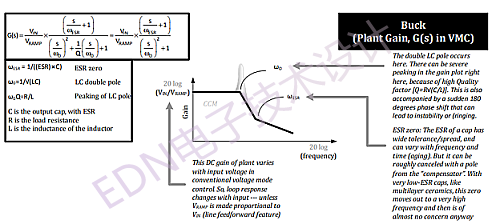
图2:来自Microsemi的降压调节器传递函数。
ωo项是电路元器件的转折频率,本文稍后将会介绍。通过查看等式中的相应项并理解一些简单的规则可以估算波德图:
• 分母中的一次方项
o 从转折频率处开始,增益下降20dB/dec;
o 从一个转折频率到下一个转折频率,每十倍频程,相位翻转45°。
• 分母中的“s”平方项
o 从转折频率处开始,增益下降40dB/dec;
o 从一个转折频率到下一个转折频率,每十倍频程,相位翻转90°。
平方项是“双极点”,总相位滞后180°。
一次项是“单极点”,具有0°总相位滞后。
分子中的项在线形图中增加而不是减少了。增益和相位的例外是右半平面零点,由于“s”是负值,因而增益增加、相位减小。
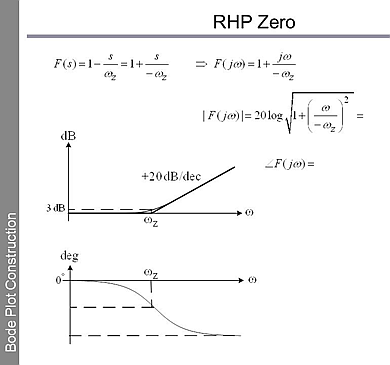
图3:RHP零方程和线形图形。
基本的L(电感)和C(电容)元件如图4所示。
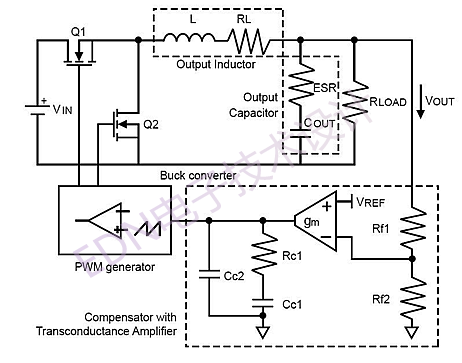
图4:基本降压稳压器电源和控制元器件。
从这些图产生了补偿网络。补偿网络的目的是在增益超过0dB(增益为1)的那一点具有足够的相位裕度。对于大多数脉冲宽度调制转换器,这远低于只有开关频率一半的奈奎斯特速率。相位裕度其实就是180°相移之间的度数差。大多数情况下,45°的相位裕度被认为是稳定的。30°的相位裕度也有可能,但它的稳定可能是有条件的。
典型的补偿网络分为类型1、类型2和类型3,如图5所示。
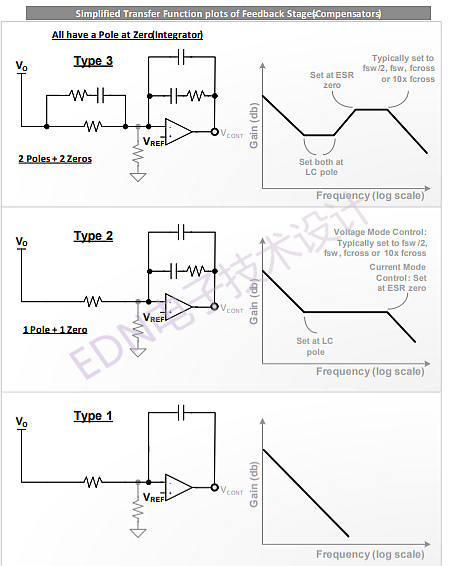
图5:三种常见的补偿网络类型。
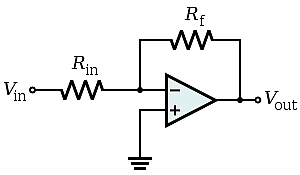
图6:基本的运算放大器补偿。
有时运算放大器的计算会令人困惑,特别是对初学者而言。诀窍是将负运算放大器输入视为固定的直流电压,将其当做交流接地。然后,用阻抗代替电阻,使Rf变为Zf,Rin变为Zin。我们知道交流电流从Vin流向Vout,方程式变为:
交流电流 = Vin/Zin = -Vout/Zf
求增益的值,得到Vout/Vin = -Zf/Zin。只需根据补偿类型(上面的类型1、2或3)替换Z值中的阻抗。这有助于了解阻抗:
• 电感 = sL = jωL
• 电容 = 1/sC = 1/jωC
• 电阻就是R
通过在功率级波特图上绘制补偿波特图并添加两个图,可以相当容易地实现稳定性。修改的Excel文件示例如图7所示。
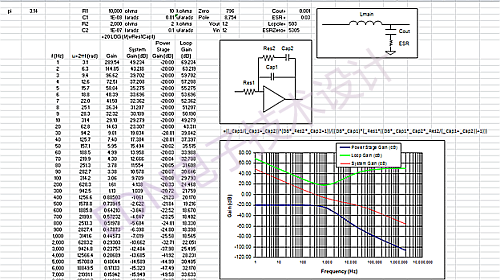
图7:修改的Excel文件示例。
该增益组合是系统的开环增益,用来确定稳定性和瞬态响应。
我喜欢绘制各个分支阻抗图,以查看电阻和电容之间的AC“转折”或“短路”的位置。可以通过更改元件值来查看频率的改变。更为重要的是,改变这些值可以改变波特图。这有助于了解系统的运行情况。
这里的目标是在交叉频率附近让斜率为-1(-20dB/dec),在这个频率点上曲线越过0dB。一旦增益图看起来不错了,就可以添加补偿网络和主功率级相位图,然后将它们加进来形成组合图。检查交叉频率的相位裕度,以确保稳定运行,这样就大功告成了!
(原文刊登于ASPENCORE旗下网站Planet Analog,参考链接:Bode Plots and Compensation Networks。)
《电子技术设计》2018年9月刊版权所有,禁止转载。


 /2
/2 





文章评论(0条评论)
登录后参与讨论