
离线式反激转换器 (off-line flyback converter) 的反馈控制经常困扰着电源工程师,因为牵涉到连续导通模式 (continuous conduction mode, CCM) 与非连续导通模式(discontinuous conduction mode, DCM)的小信号模型、TL431与光耦合器(opto-coupler)的特殊反馈补偿模式,使得反馈参数的设计,还流于试误(cut and try)模式。本设计指南提供完整的理论设计,从功率级的转换函数到设计TL431与光耦补偿器,使得系统获得良好的相位裕度(phase margin),达到瞬时稳定度的要求。本文将利用Mathcad 软件做理论计算,同时以Simplis 模拟做比较验证。此法可应用于立锜科技 RT773x 系列离线式反激控制IC的电路设计中。
绝大部份反激转换器都采用次级稳压的峰值电流控制(peak current mode control)来完成调节输出电压的反馈方式,图一为其简图。次级输出电压经过光耦与TL431电路,在初级侧形成电压VCOMP,这个电压与初级峰值电流比较,决定开关晶体管Q的占空比,完成负反馈稳压的作用。其中,RS 为初级电流检测电阻,CTR 为光耦的电流传递比(current transfer ratio),GFB为小信号增益 (在RT773x IC内部设计为1/3),Se为消除次谐波振荡(sub-harmonic oscillation) 所外加的斜率补偿(slop compensation)。
为方便后续的推导与说明,电路做了基本的假设如下:
1.开关器件Q与次级二极管D为理想组件
2.变压器视为理想器件
3.TL431的开回路增益为无限大 (常规的开路增益约50 ~ 60dB)
4.光耦的电流传递比为一常数
其中,光耦的电流传递比是一个极非线性的数值,随着工作点(通过光耦二极管的电流)的变动,电流传递比也会随着变化。但为了方便说明与推导起见,姑且将其视为定值。在常规的应用中,流过光耦二极管的电流很低,可能低于1mA,导致电流传递比可能小于20%。
其他名詞與符號定義如下:
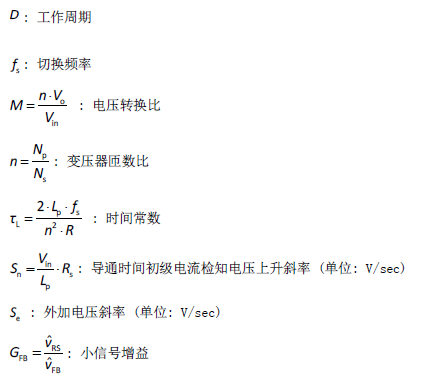
图一、利用TL431与光耦反馈的反激转换器
在许多不同的参考文献中可以找到不同的反激转换器小信号模型[1-3],这些模型都是基于状态平均(state averaging)法推导的,可能是因为简化或假设条件不同而有些许差异。本文乃采用 Christophe Basso 的小信号模型作反馈补偿设计[1]。从实用的角度而言,所有小信号模型都将得到近似的结果。
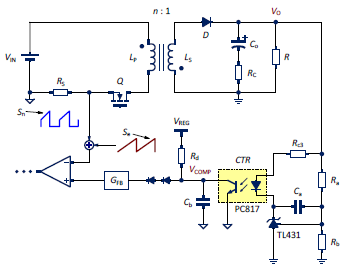
连续导通模式(CCM)的转移函数(transfer function)

这是一个一个极点(pole)、两个零点(zero)的系统,如图二所示。极点的位置与电路参数以及负载轻重有关,而第一个零点为输出电容与其等效串联电阻(ESR)所构成,为一固定不动的零点。另一个零点在s-平面的右半边,称为右半平面零点(RHP zero),这个右半平面零点的位置与输入电压、负载电流的高低有关。在一个设计良好的系统里,交越频率 (cross-over frequency) 必须设计得远低于右半平面零点频率,才能有足够的相位裕量(phase margin)。所以在补偿电路设计时,这个高频的零点将忽略不计。
图二、CCM 1P2Z 的转移函数图
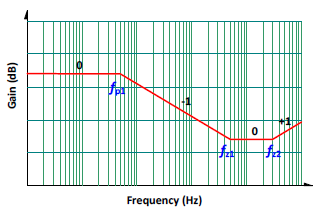
非连续导通模式 (DCM)的转移函数

将(2)式的转移函数绘制在波德图(Bode Plot)上,如图三。在DCM 模式下,功率电路小信号模型呈现两极点与两零点,不过其中有一个极点ωp2频率极高(远高于目标的交越频率),在设计反馈时不需考虑。所以等效上,不论CCM 或是DCM,其功率级的转移函数,均可视为一极点、两零点(1P2Z)的形式,这非常有利于反馈组态电路的选定。从(1)与(2) 转移函数来看,这些极点与零点,有些是固定不变的,如输出电容等效串联电阻ESR造成的零点。大部份的极零点与直流增益都与工作点(operating point)有关,所谓工作点即指某一个输入电压与某个负载电流工作条件。接下来,就用数值来说明这些极零点的变化。
图三、DCM 2P2Z 的转移函数图
工作点与极零点变化
举一个常规的应用例子来说明:一个反激转换器,输入电压范围为90V 到360V,负载范为为0到3A,输出电压为12V。并有着下列的电路参数 : LP = 1.1mH, NP : NS = n = 7.7, CO = 1360μF, RESR = 30 mΩ, RS = 0.56Ω, fS = 65kHz, Se = 3.46 x 104 V/sec, GFB = 0.3333。(其中 Se 与GFB 必须由控制IC提供)根据反激转换器的工作原理[4],在常规的设计里,高输入电压与轻载状态总是让转换器倾向于非连续导通模式;反之,低输入电压与重载的条件下,转换器会走向连续导通模式。其间存在着一条所谓 CCM与DCM 的边界曲线,如图四所示,在曲线上方为CCM 工作模式,曲线下方为DCM 工作模示。(3)式就是代表这条曲线的方程式。
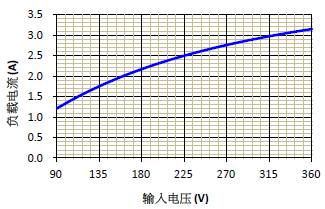
图四、CCM 与DCM 边界曲线

不同工作点的零极点变化
表一为范例中的直流增益以及零极点位置的计算结果。图五为输入电压与负载电流变化的波德示意图。可以看出,当低输入电压与高负载时,增益曲线较低;反之,高输入电压与轻载时,增益曲线较高。这个事实关系到如何选择工作点作为反馈设计的基准,很显然,低输入电压与重载条件做为反馈设计点是比较恰当的。也就是说在这样的条件下,如果拥有足够的相位裕量,通常也能延伸到其他工作点有着更好的相对稳定裕量。
表一、不同工作点的直流增益与零极点位置
|
VIN (V) |
90 |
180 |
270 |
360 |
90 |
90 |
90 |
360 |
360 |
360 |
|
IO (A) |
3.0 |
3.0 |
3.0 |
3.0 |
3.0 |
2.0 |
1.0 |
3.0 |
2.0 |
1.0 |
|
Mode |
CCM |
CCM |
CCM |
DCM |
CCM |
CCM |
DCM |
DCM |
DCM |
DCM |
|
G0 (dB) |
13.1 |
16.5 |
17.0 |
17.1 |
13.1 |
15.6 |
17.0 |
17.1 |
18.8 |
21.8 |
|
fP1 (Hz) |
59.0 |
53.0 |
57.0 |
58.5 |
59.0 |
44.0 |
19.5 |
58.5 |
39.0 |
19.5 |
|
fP2 (Hz) |
NA |
NA |
NA |
21.7k |
NA |
NA |
25k |
21.7k |
32.6k |
65k |
|
fZ1 (Hz) |
3.9k |
3.9k |
3.9k |
3.9k |
3.9k |
3.9k |
3.9k |
3.9k |
3.9k |
3.9k |
|
fZ2 (Hz) |
16.5k |
44.2k |
75k |
106k |
16.5k |
24.7k |
49.5k |
106k |
160k |
319k |
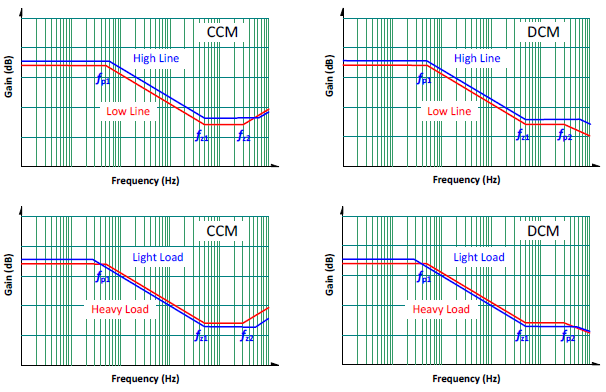
图五、改变工作点的增益曲线变化
从前面的分析得知,不同的操作点有着不同的零极点位置以及不同的低频直流增益,所以存在着许多设计补偿电路的方法。基本上一个Type II 的补偿器 (一个零频率的极点,随着一个低频零点以及一个极点) 最适合做此类的补偿。如果用一个低频零点来补偿功律电路的低频极点,同时利用高频极点来补偿ESR零点,这样将容易获得较好的相位裕量。利用补偿器的中频段增益来设定适当的交越频率,系统将有相当好的稳定度。
一种简单实用的方法便是先设定好一个“目标回路增益”(target loop gain)为:
![]()
这样的回路增益在波德图上就是一条 -20dB/dec 斜率的直线,如图六,在低频直流部分有着极高(相当于补偿器的开路增益)的增益,所以整个电路的直流稳态电压调整率理论值可为零。同时,其交越频率fC为
![]()
因为斜率近似 -20dB/dec,所以在交越频率有着近90° 的相位裕量。对一个离线的反激转换器而言,交越频率设计在低压输入满载时工作点为800Hz到3kHz为最恰当 (以65kHz 开关频率而言)。
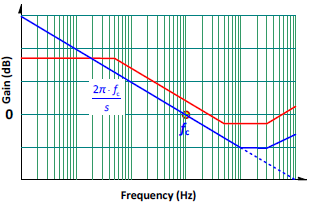
图六、功率电路转移函数曲线(红色)与目标回路增益(蓝色)
设计步骤
有了以上的了解与认知后,很自然的一般补偿器设计的方法就可以应用了,现将这些步骤整理如下:
1.选择低压输入与满载做为补偿电路设计基准的功率电路。如前所述,采用这个工作点设计的补偿器可以延伸涵盖到其他工作点,并且有更好的相位裕量。
2.设定交越频率 fC,其回路增益波德图为 -20dB/dec 斜率。越高的交越频率,虽然代表着更快的瞬时响应,但是别忘了反激转换器固有的右半平面零点问题,这个零点无法用传统的极点补偿,所以交越频率必须远低于这个零点位置。实务上,离线反激转换器的交越频率多半设计在3kHz以下。
3.定义一个两极点、一零点的补偿电路,并设定补偿电路的零点为功率电路的低频极点;设定补偿电路的高频极点为功率电路的ESR零点。利用一组Type II 的补偿电路,恰可以结合功率电路的转移函数,成为目标回路增益。
4.根据功率电路在fC 的增益,算出补偿器的中频增益。
5.同时,相位裕量可以先预估。
6.补偿电路的转换函数可以确定了:
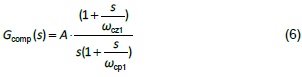
也就是说 (6) 式的 A、ωcp1 與 ωcz1 都可以计算出来了。
补偿电路的实现
1.选用最广泛使用的TL431与光耦合器架构,如图七。实现Type II 补偿器的电路结构有许多种,不在此讨论,仅提供最常用结合TL431与光耦的常规Type II电路计算与说明。
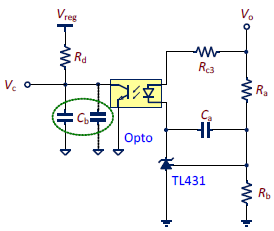
图七、实现反馈补偿的电路结构
2.图七补偿电路的小信号转换函数如下 [5]
![]()
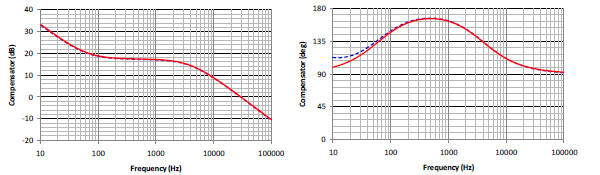
图八为相应的补偿器波德图。
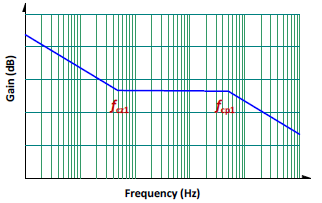
图八、Type II 补偿器波德图
3.从(7)式看,共有Ra、Rb、Rc3、Rd、Ca、Cb 及 CTR 等七个参数待定。而已知的只有前面算出的三个关系式。
![]()
![]()
![]()
换句话说,有四个参数必须从其他条件获得。
4.首先为电阻Rd,大部份新型的控制IC都已设定好,设计者可以从IC供货商数据中获得。
5.其次,TL431 的参考电压也可从供货商数据中得取,常规约为2.5V。为让TL431正常运作,通过Rb 的电流(Ivd) 至少须125μA,一般加上余裕,可以设定成250μA。所以 Ra 与Rb 就可以很容易的计算出来。
![]()
![]()
6.此外,光耦的电流传递比(CTR)可以从供货商数据里估计。事实上如前所述,CTR 为一非线性值,随通过光耦二极管电流大小而变。一般通过光耦二极管电流约为几百μA,CTR 约在0.1 到0.5之间,确实的数值必须透过精密量测而得。此例将假设CTR 为0.5。
7.如此一来,七个参数已经决定了四个,其余的三个参数可藉由(8)、(9)及(10)三个关系式算出唯一解。
8.算出RC3 的数值后必须要检讨一下。从TL431 运行原理,其阴极电压必须高于2.5V,同时流过阴极的电流必须大于1mA 才可以获得正确的稳压。通常会在光耦二极管上并联一个1kΩ 左右的电阻以提供足够的阴极电流。特别注意,这个并联电阻并不会改变系统小信号特性。所以可以得到下列关系式:
![]()
![]()
其中VF 为光耦二极管的顺向压降,常规约略为1.0V。RC3的最大值就可以估计出来了。
![]()
代入前面的例子,同时假定最大阴极电流为1.5mA,则RC3必须小于5.6kΩ。太高的RC3会降低补偿电路的中频增益。如果计算出来的RC3大于上限值就表示必须降低设定交越频率,或采用其他的补偿计算方法。
9.光耦合器在先天上存在一个并联于光耦三极管的等效电容,必须用电路量测的方法测得,常规约在2nF到5nF之间。补偿器计算出来的Cb值必须减去这个杂散电容,才是要外加的电容值。如果算出来的Cb值比杂散电容小,那就不需要外加电容了,不过因为不能完全补偿ESR零点(极点靠近低频),所以相位裕量会变差一些。
設計工具與模擬驗證
为了让上述计算可以快速进行,特别制作两个Mathcad计算程序“Flyback CCM Type II Compensation” 与 “Flyback Loop Gain Analysis”,方便反馈的计算与分析。同时可藉由Simplis仿真来比较本文模型计算的误差。图九为Simplis仿真电路图,图十到图十二为本文提供的设计方法用Mathcad 分析计算与Simplis 模拟结果比较。图十为功率电路转移函数波德图,图十一为补偿器电路转移函数波德图,图十二为回路增益波德图。(a)为幅值,(b)为相位。图中红色实曲线为Mathcad依据小信号模型计算结果,蓝色虚曲线为用Simplis直接仿真的结果。可以看出从低频段到交越频率,小信号模型有很好的准确度。高频部份由于小信号模型的误差,有比较大的误差,不过因为回路增益已远小于1,对于实际瞬时响应影响不大。图十三为用Simplis仿真在输入电压为90V情况下阶梯负载变化(负载自1A瞬变到3A)的输出电压瞬时响应图,可以看出只有很小的过冲(overshoot)以及很快的回复时间(settling time)。
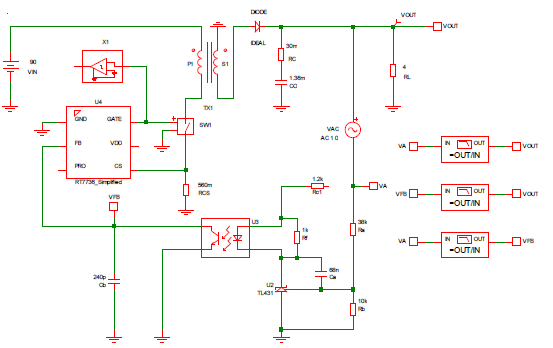
图九、Simplis 仿真电路图
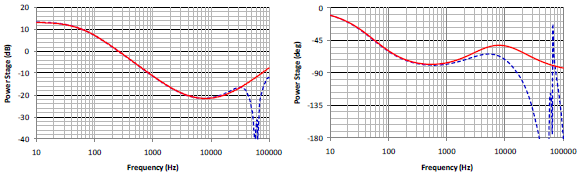
图十、功率电路转移函数波德图 (a) 幅值, (b) 相位
图十一、补偿器电路转移函数波德图 (a) 幅值, (b) 相位
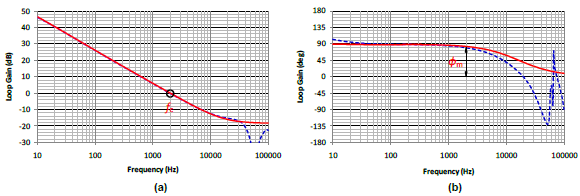
图十二、回路增益波德图 (a) 幅值, (b) 相位
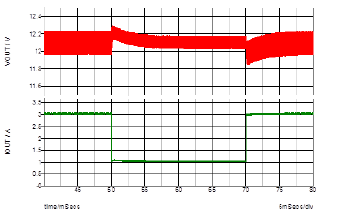
图十三、负载瞬变瞬态响应图
[1] Christophe P. Basso, “Switch-Mode Power Supplies Spice Simulations
and Practical Designs”, McGraw_Hill, 2008.
[2] W. Kleebchampee and C. Bunlaksananusorn,
“Modeling and Control Design of a Current-Mode Controlled Flyback Converter
with Optocoupler Feedback”, IEEE PEDS 2005.
[3] Yuri Panov and Milan M. Jovanovic´, “Small-Signal Analysis and Control Design of Isolated Power Supplies with Optocoupler
Feedback”, IEEE TRANSACTIONS ON POWER ELECTRONICS, JULY 2005.
[4] 王信雄, “定频返驰式转换器设计指南”, RTAD1202TC, 立锜科技设计指南, 2012.
[5] John Schönberger, ”Design of a TL431-Based Controller for a Flyback Converter”, Plexim GmbH.
来源:立锜科技




 /4
/4 






文章评论(0条评论)
登录后参与讨论