对嵌入式工程师来说,“串口”是一个再熟悉不过的模块,熟悉到像喝水一样自然。与此同时,有关串口的很多细节,却被渐渐地模糊和忽略,例如: 我们经常挂在嘴边的serial、UART、RS232等概念,究竟是怎么回事?它们之间有何联系?有何区别? 串口的波特率(baud rate)是怎么定义和计算的?比特率(bit rate)又是怎么回事?二者的关系又是怎样? 为什么波特率有误差?通信过程中所容许的误差范围是多少? 本文将对上述问题,进行简单的总结和归纳,以便指导有关的开发工作。 2. 概念解释 2.1 串行通信(Serial communication) 在通信和计算机科学中,Serial communicaTIon是一个通用概念,泛指所有的串行的通信协议,如RS232、USB、I2C、SPI、1-Wire、Ethernet等。这里的串行(serial),是相对并行通信(parallel communicaTIon)来说的,如下图: 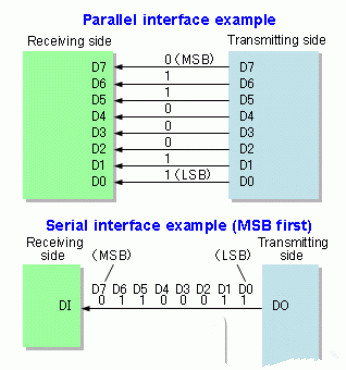
图片1 并行通信和串行通信 上面图片1是非常容易理解的,这里不再过多解释,有关串行通信的优缺点,可参考“Serial communicaTIon[1]”中的解释。 2.2 同步串行通信(Synchronous serial communicaTIon)和异步串行通信(Asynchronous serial communication) 理解串行通信的概念之后,大家可能会有疑问:接收方接收到一长串的、表示0/1电平跳变的信号之后,怎么还原出有效的信息呢?有两种方法: 1)发送端在发送串行数据的同时,提供一个时钟信号,并按照一定的约定(例如在时钟信号的上升沿的时候,将数据发送出去)发送数据,接收端根据发送端提供的时钟信号,以及大家的约定,接收数据。这就是常说的同步串行通信(Synchronous serial communication),I2C、SPI等有时钟信号的协议,都属于这种通信方式。 2)发送端在数据发送之前和之后,通过特定形式的信号(例如START信号和STOP信号),告诉接收端,可以开始(或者停止)接收数据了。与此同时,收发两方会约定一个数据发送的速度(就是大名鼎鼎的波特率),发送端在发送START信号之后,就按照固定的节奏发送串行数据,与此同时,接收端在收到START信号之后,也按照固定的节奏接收串行数据。这就是常说的异步串行通信(Asynchronous serial communication),我们本节的主角----串口通信,就是这种通信方式。 注1:严格意义上,START/STOP形式的异步串行通信,称作“asynchronous start-stop communication”,但由于这种形式在异步串行通信里面使用太广泛了,二者也就混为一谈、不加区分了。 注2:根据同步方式的不同,串口也包括异步串口和同步串口两种。本文所指的串口,都是只异步串口。 2.3 串口(Serial port)和RS-232 在计算机的世界里,“串口”是使用串行的方式进行数据传输的一种接口,它是相对于计算机的并行接口来说的。虽然串行通信可以通过多种技术实现(如USB、Ethernet等),但由于历史原因,我们所说的串口,特指符合RS-232规范的接口,下图就是我们比较常见的一种: 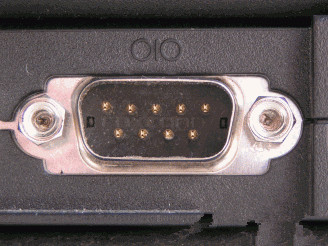
图片2 male DE-9 connector 串口是用于实现串行通信的物理接口的一种统称,但只有名称还远远不够,通信的双方需要一些约定和规范,才能正确的进行数据传输,例如需要哪些信号线、信号的电平如何、接口的形状如何、数据的编码格式、数据传输的速率、等等。 在串口通信中,这些内容主要由两部分定义: 1)RS-232(有时候也称作RS-232-C,C是版本)规范,定义“硬件相关”的特性,包括: 电气信号特性,如信号电平(-3V~-15V表示逻辑1,+3~+15V表示逻辑0)等; 接口特性,如连接器(connectors)的定义(9-pin的 DE-9 Male/Female,25-pin的DB-25 Male/Female等)、管脚信号的定义、等等; 电缆(cable)的特性,如电缆的长度(RS-232没有显式的限制电缆的长度,但限制了电容,效果一样)等; 等等。 2)串口硬件,定义“软件相关”的特性,包括: 数据的编码格式(character encoding),就是上面提到的“asynchronous start-stop”格式,也即我们所熟知的的“起始位、数据位、校验位、停止位“; 数据传输的bit rates,也即我们熟悉的波特率(baud rate)。 注3:说来奇怪,RS-232规范规定了串口通信有关的方方面面的特性,唯独没有规定数据传输相关的编码格式和bit rates。可能是硬件的差异太大,以至于该规范无法完全覆盖。 注4:虽然RS-232规范没有规定bit rates,但它做了一个要求----不能超过20Kbps,虽然从现在来看,这就是瞎扯,呵呵。 注5:RS-232定义了各种形态的串口接口,如DE-9、DB-25等等,但这大多和上古时代的通信有关场景以有关,随着数字通信的普及,以及USB等协议的蚕食,这些庞然大物已经越来越少见了。反而在嵌入式场景中,一些简化的形态,如4线(VCC/RX/TX/GND)串口等,反而使用的比较多。 2.4 UART(Universal Asynchronous Receiver/Transmitter) 我们在上一节(2.3)提到,由于硬件的差异太大,RS-232并没有规定串口通信的编码格式和bit rates。因此,这一块的实现,完全由具体的硬件(或者对应的软件负责)。 在早期的产品中,大多使用软件的方式,以一定的速率(bit rates),产生出符合编码格式的bit流。但后来为了提升性能,很多产品(如IBM的PC)使用了专门的硬件模块,完成这个事情,这就是我们经常挂在嘴边的UART。 至此,串口通信有关的术语已经悉数登场,简单总结一下吧: 串行通信(serial communication),泛指使用bit流的形式进行数据通信的方法。 同步串行通信(Synchronous serial communication)和异步串行通信(Asynchronous serial communication),串行通信的不同实现方法,主要区别在于同步的方式。 串口(serial port),特指使用“异步串行通信”的方法进行数据通信的接口,主要是从硬件的角度描述的。 RS-232,定义两个串口之间通信行为的一个规范,偏向于电平、连接器、电缆等硬件特性。 UART(Universal Asynchronous Receiver/Transmitter),一个硬件模块,根据串口硬件所规定编码格式、bit rate,产生处通信所需的bit流。 2.5 TTL电平转换以及USB转串口 最后,再念叨一下TTL电平转换有关的概念。当前,串口应用最广泛的场景,就是嵌入式产品和PC之间的一些数据交互,如debug输出、firmware更新等。但这里有一个比较麻烦的事情: PC串口符合RS-232规范,其电平是“-3V~-15V/+3~+15V”。而大多数的嵌入式产品,都是使用TTL电平(如0v/3.3v)。因此,这两种电平无法直接连接。怎么办呢?增加一个电平转换电路就是了,于是嵌入式产品和PC之间的连接就变成了如下的形式: PC(串口)<---------->电平转换电路<---------->嵌入式产品(串口) 还有更麻烦的事情,随着技术的进步,串口这样的大杀器,渐渐地被PC抛弃了,怎么办呢?USB转串口应运而生了,连接方式变成了: PC(USB接口)<---------->USB转串口<---------->嵌入式产品(串口) 3. 波特率(baud rate)和比特率(bit rate) 理解了串口中这些既熟悉又陌生的术语之后,我们再来看看波特率(baud rate)。 说实话,在数据通信中,比特率(bit rate)比较容易理解,就是一定时间内,能够传输多少个bit。例如bps,就是bit per second的缩写。那什么事波特率呢? 在通信中,波特率也称作符号速率(symbol rate),指的的是“数据变化”的速率。说着很拗口,我们举个例子: 在计算机系里,小杨和小李是一对好基友,不过小杨是学霸、小李是学渣。所以,期末考试到了,小杨决定“鼎力相助”。怎么办呢? 二人约定,考试时,小杨携带黑色和白色两支笔,根据两支笔出现的情况,表示A、B、C、D四种答案,即: 白色的笔没有出现 黑色的笔没有出现 A 白色的笔没有出现 黑色的笔出现 B 白色的笔出现 黑色的笔没有出现 C 白色的笔出现 黑色的笔出现 D 同时约定,在考试开始1小时之后,小杨从第1道选择题开始,以每分钟更换一次的速度,更换答案。小李按照这个速度,以及大家的约定,通过观察两支笔出现的情况,获得答案。 确实是个好方法,不过仔细想想,这其实是一个典型的异步通信过程。通信的过程中,答案更新的速度(每分钟1次),就是我们所说的baud rate(或者symbol rate),即1 bd per minute(可以把bd看着baud的单位)。 与此同时,每次更新,传递了多少信息呢?表面上看是A、B、C、D,本质上是由白和黑所代表的两个bit,00、01、10或者11。因此,每次更新传递2个bit的信息,所以bit rate就是2 bits per minute。 上面的例子中,通信的波特率和比特率是不同的,分别为1和2(per minute),而有些通信系统,例如我们所熟知的串口通信,它们却是一样的,例如我们说115200的波特率,实际上的比特率也是115200。因为一次只传输1个bit(0或者1)。 4. 帧格式和波特率误差 我们知道,串口通信的数据格式包括start bit、data bits、parity bit和stop bits,其中: start bit固定为1bit; data bits可以为5、6、7、8或者9bits,不过常用的都是8bits; parity bit是非必须的,一般为0bit; stop bit可以是1bit和2bits两种,一般都是1bit。 图示如下: 串口通信技术简单总结和归纳 图片2 串口帧格式 因此,从本质上讲,波特率定义了帧格式中每一个bit的信号的持续时间,即1 / bard rate。而一帧数据传输完成,需要的时间为(1 / bard rate) * 10(以8N1的帧格式为例)。 这种异步通信的方法,有一个坏消息,也有一个好消息: 坏消息是,受系统时钟精度、分频系数等影响,波特率可能不精确,存在误差。而在一帧数据的传输过程中,误差会累积。 好消息是,如果误差累积的不多,受start/stop信号的矫正作用,下一帧数据中,可将累积误差清零。 关于误差,我们再稍微详细分析一下。 根据我们的常识,信号是在中间点采样,因此,在一帧数据中,如果误差累积超过(1 / bard rate / 2)的时间,则数据会采样错误。假设理想的baud rate是BDi,实际的baud rate是BDr,则: 每一个bit的误差时间是:1 / BDi – 1 / BDr。 10个bit的误差时间是:10 * (1 / BDi – 1 / BDr)。 因此,安全的误差范围是:abs(10 * (1 / BDi – 1 / BDr)) < 1 / BDi / 2。 以115200的波特率为例,带入上面的公式: abs(10 * (1 / 115200– 1 / BDr)) < 1 / 115200 / 2 -1 / 115200 / 2 < 10 * (1 / 115200– 1 / BDr) < 1 / 115200 / 2 (20 / 21) * 115200 < BDr < (20 / 19) * 115200 因此,115200波特率所容许的误差范围是20 / 21 ~ 20 / 19,即+/- 5%。其它波特率也可以带入公式去计算。另外,如果双方都有误差的话怎么办?嘿嘿,你懂的,除2吧。
关闭
站长推荐
 /2
/2 












文章评论(0条评论)
登录后参与讨论