原创
虹科RTaW-Pegase:实时网络架构的仿真设计与自动配置工具
2022-7-11 15:12
1607
15
15
分类:
汽车电子
文集:
RTaW
随着汽车科技化、智能化、网络化的不断发展,汽车内部最新的应用和功能正在不断提高对带宽、降低延迟、同步、高可用性、QoS和降低成本的要求。当前和传统的汽车网络协议不足以满足这些即将到来的需求。
在这种情况下,车载以太网的技术运用越来越广,当然传统车载网络技术CAN/CAN FD也不可能被取代掉。至少就目前看来,经过数十年的发展,今天的汽车行业CAN在车载网络领域占据着绝对的优势,CAN已经形成了完善的标准体系,这意味着CAN有着高度的兼容性、完善的开发工具链体系、更大的供应商选择余地和更低的采购成本(这对于整车开发是极其重要的),所以现阶段还是不可能完全替代掉CAN总线。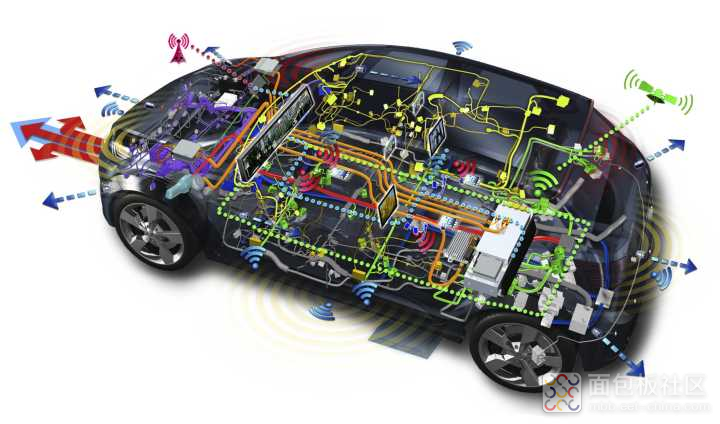
图1:日益复杂的车载网络架构
除此之外,加之汽车目前车载网络系统可能还会有LIN总线、FlexRay、MOST等其他类型的总线。车载以太网的加入就会使得车载网路系统变得越来越复杂,那么在这种不可逆转的大趋势大背景下,我们该如何保证通信延迟以及多数据并发的时候依然能够保证车载网络架构满足功能要求呢?如何才能设计出一种安全的、最优的车载异构网络系统呢?
基于上述车载网络日趋复杂的背景下,车载网络工程师/架构师急需一款专业并且功能强大的工具对初步的架构设计结果进行客观分析,并且能够提供可视化的分析结果,从中获取优化车辆网络架构优化的思路。为此,虹科的供应商RTaW(INRIA下属公司)为汽车、航空等领域提供了实时网络的仿真和配置工具RTaW-Pegase。
图2:RTaW-Pegase应用场景
RTaW-Pegase支持TSN(时间敏感型网络)、CAN/CAN FD/CAN XL、LIN以及用于车外通信的无线网络等。除了精确的实时仿真分析外,RTaW-Pegase还可以计算通信延迟和缓冲区利用率的上限,还包括现先进的自动配置算法来确保硬件和软件组件的正确性和优化方式。
RTaW-Pegase主要特征:RTaW-Pegase应用功能介绍: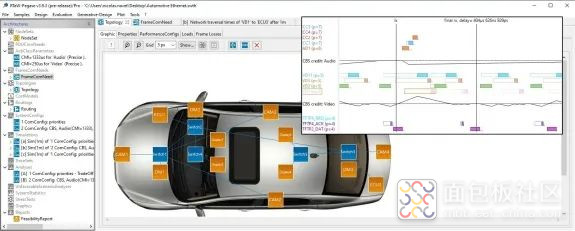
图3:快速建立仿真模型
CAN/CAN FD:支持导入标准数据库、设置网关路由模式及其参数,分析时间延迟;车载以太网:可根据需要选择不同流量整形(AVB、TSN等)技术,分析不同技术对系统时间延迟的影响。
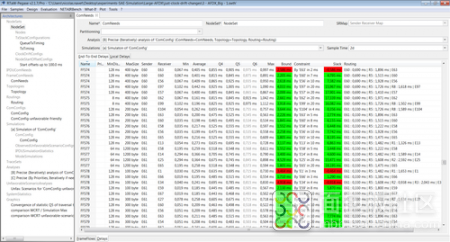
图4:甘特图
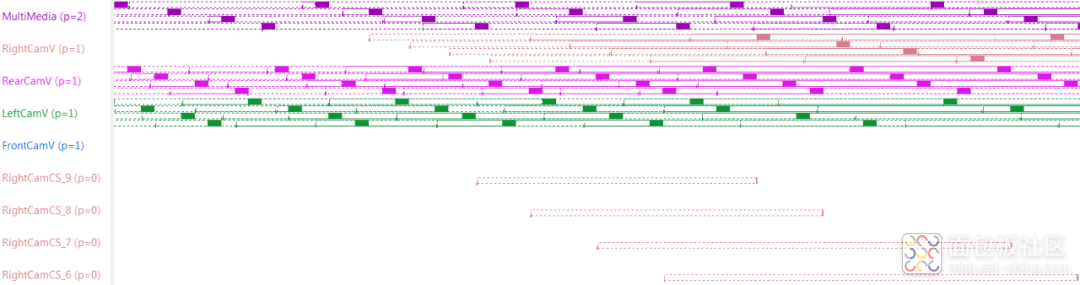
图5:列表形式
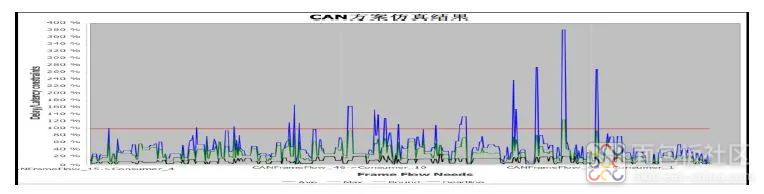
图6:折线图形式
RTaW-Pegase与PREEVision的区别:PREEvision是一个基于模型的设计开发工具,用于进行电子电气系统的可视化开发和评估。而RTaW-Pegase在早期进行设计E/E体系架构设计的时候,可以在数据流传输时提供备选的拓扑结构以及相关假设(如TSN的拓扑应力测试、TSN拓扑结构的优化、CAN的额定负载等),能够有效的降低成本并提高可扩展性;
同时在基于模型的E/E体系结构开发的阶段,PREEVision可能就需要手动进行网络配置或者优化网络配置,而在RTaW-Pegase软件里面提供了所有协议的自动化配置算法,能够实现ZeroConfig,确保满足时效性和可靠性的限制;
在验证车载网络架构的合规性的阶段,RTaW-Pegase支持在网络架构中看到实时数据流,而PREEvision中定义的架构数据是基于平台的,可能就需要用到工具中的一个层级“Variant Management(变型管理)“来提取出来。
 图7:RTaW-Pegase在整个开发中设计选择及验证流程
图7:RTaW-Pegase在整个开发中设计选择及验证流程
作者: 虹科汽车智能互联, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-3988242.html
版权声明:本文为博主原创,未经本人允许,禁止转载!




 /3
/3 






文章评论(0条评论)
登录后参与讨论