
二、系统的具体设计与实现
1、系统的总体设计方案
系统由单片机作为小车的控制核心,控制循线检测模块,电机驱动模块,显示及声光指示模块,超声波探测模块,方向控制模块,测距模块等几部分组成,结构如图3所示。
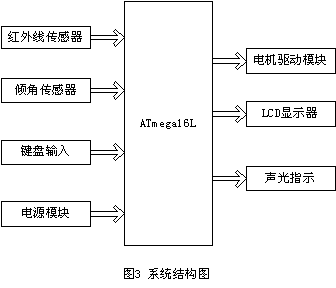
经过上述的分析和论证,决定了系统各模块采用的最终方案如下:控制模块采用Atmega16L的8位单片机;循线检测模块采用由反射式光电传感器RPR220构成的未调制的红外光检测电路;采用超小型PCB6009高性能细分驱动器来驱动两相混合式步进电机42BYGH102;显示模块采用LCM1602;电源模块采用DC/DC模块HYD5-24S5实现。采用倾角传感器WQ36-10实现角度的检测。
2、系统的硬件设计
(1)寻迹设计
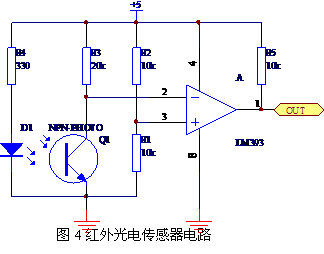
红外光电传感器检测电路如图4所示,光线照射到路面并反射,由于黑线和白纸的反射系数不同,可根据接收到的反射光强弱判断是否达到黑线。该设计使用反射式光电传感器RPR220,光电传感器的发射孔和接收孔位于同一侧。
|
电传感器发射管发射的红外线探测到白色物体时,接收管导通。电压比较器LM393的Ⅴin-拉低,输出为高电平。当检测到黑线时,接收管截止,Ⅴin-为高,比较器输出为低电平。
为保证小车沿黑线行驶,在车体的前后两端各加三个检测器并按品字形排列。在小车行驶的过程中,中间的探测器一直在进行检测,若向左方向偏离黑线,则右侧的探头就会检测到黑线,把信号传给单片机,单片机控制车头向右转。
 |
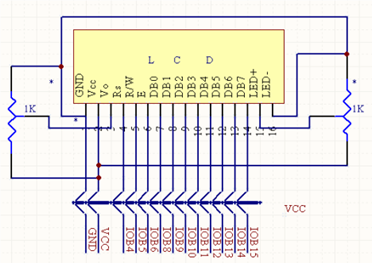
(2)显示和键盘电路的设计和实现
显示已用的时间和倾角的角度。其原理图如图5所示。
 |
|
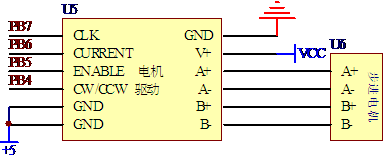
(3)电机驱动模块
 |
|
3、系统的软件设计
总的工程程序包括始化程序、主程序、步进电机控制程序等部分。
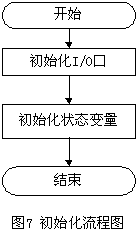
(1)初始化程序流程
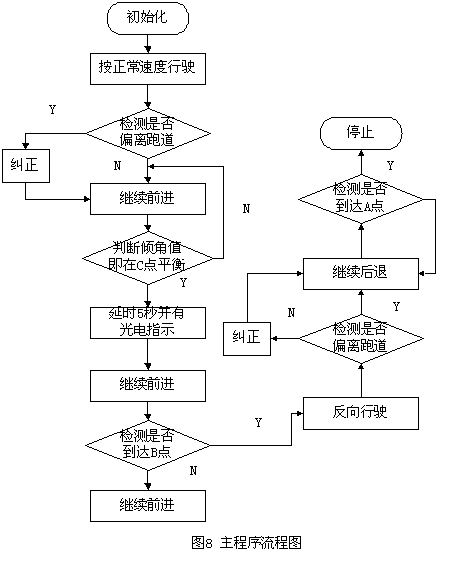
(2)主程序流程



 /4
/4 









文章评论(0条评论)
登录后参与讨论