
三、系统调试
1、调试方法和过程
采用先分别调试单元模块,调通后再进行整机调试的方法,提高调试效率。
(1)显示模块和键盘的调试
将显示模块、键盘、AVR组成的最小系统,编写一简单的程序进行调试,通过按键来改变显示数,观察液晶显示的变化是否正确。
(2)电机模块的调试
(3)红外光电传感器的调试
(4)角度传感器的调试:将传感器正向垂直安装,标签的指示箭头垂直指向地心时,为输出电中点,电压值为2.5V。在外部压环紧固前,转动传感器,微调起始角的位置,然后再将压环上紧。传感器按逆时针方向转动,输出电压增大。
四、实际测试
1、测试设备
秒表,2m卷尺
2、测试数据及结果分析
表1 不加配重时运动时间的测量
|
次数 |
第一次 |
第二次 |
第三次 | |||||||
|
显示 |
实测 |
误差 |
显示 |
实测 |
误差 |
显示 |
实测 |
误差 | ||
|
A点到中心点C 的行驶时间/S |
15 |
15.2 |
1.3% |
10 |
10.4 |
3.8% |
8 |
8.3 |
3.6% | |
|
A点到中心点C并处于 |
25 |
27.2 |
8.1% |
20 |
20.8 |
3.8% |
15 |
15.6 |
3.8% | |
|
在C点保持平衡状态时间/S |
5 |
4.9 |
2.0% |
5 |
4.8 |
4.2% |
5 |
4.9 |
2.0% | |
|
从C点平衡状态 |
14 |
14.3 |
2.1% |
9 |
9.6 |
6.3% |
7 |
7.9 |
1.3% | |
|
车头距末端B 的距离/mm |
27 |
32 |
37 | |||||||
|
在B点停止的时间/S |
5 |
5.3 |
5.7% |
5 |
4.9 |
2.0% |
5 |
5.4 |
7.4% | |
|
从末端点B退回 |
30 |
31.3 |
4.1% |
24 |
25.1 |
4.4% |
17 |
18.4 |
7.6% | |
误差主要来自两方面:一是由于测量者的反应时间引起的误差:二是由于实时控制的存在,调整过程中可能遇到电机的调整,这种调整可能会引起初始计时时间的波动。
五、结束语
设计综合运用了光、机、电技术,设计中较有特色的部分是:硬件上采用倾角传感器结合独特的算法实现了较精确的平衡控制,可以准确地控制小车的运行。从最终的结果看,本系统有较强的适应能力,能够完整地实现基本要求。
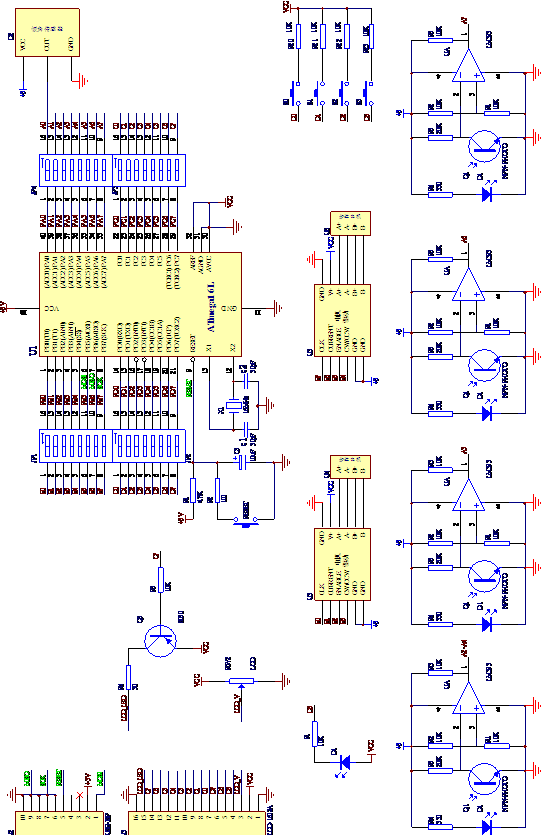
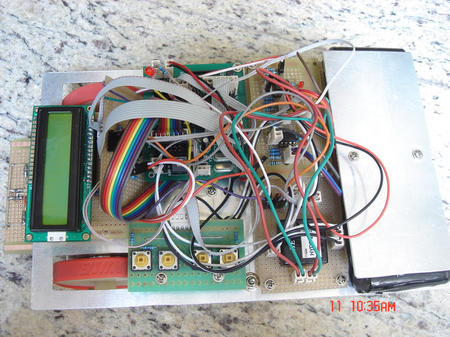
附录 电路原理图、实物图片:



 /2
/2 





文章评论(0条评论)
登录后参与讨论