1、概述
在嵌入式操作系统中,总是存在多个任务并发运行。这些任务间需要共享和竞争资源,也可能存在某种“协作”关系。在资源不可用时,或“协作”条件未达到时,任务需要等待。有时,因同一原因需要等待的任务存在多个。比如,如果将CPU也视为一种资源,在一般的单处理器中,总会存在一个或多个任务在等待CPU的空闲而被置入“就绪队列”中。
不仅是CPU的就绪队列,对于诸如信号量、邮箱队列等内核提供的服务,操作系统也需要为这些结构实现任务的阻塞队列。当任务申请延时时,需要将任务置于某种队列结构中,以备内核在系统时钟中断发生时或之后对这些任务进行处理。一种极端的实现机制是,不设置任务的队列结构,在事件发生或资源可用时,操作系统遍历每一个任务,检查是否阻塞,如果是,则将任务置为就绪态。这种实现机制,在任务数少,且硬件资源如RAM等不够用的情况下非常有效,但对于任务数较多,且调度算法相对而言复杂的情况下,显然效率太低。
这里,针对整个系统内核的各个对像,信号量、消息队列、就绪队列等,实现一种适合的队列结构。
首先,会简要的介绍在eos中任务的实际表示,然后会明确设计的需要,提出相应的设计要求,再介绍队列的实现。最后,就整个内核,简要说明内核中的各种队列是如何以此为基础实现的。
二、任务的表示
首先明确的是,eos并不支持多进程,而只支持多线程。整个内核作为一个大的进程体,而任务则对应于进程体内的多个线程。任务作为进程内的活动单元,表现为如下形式。
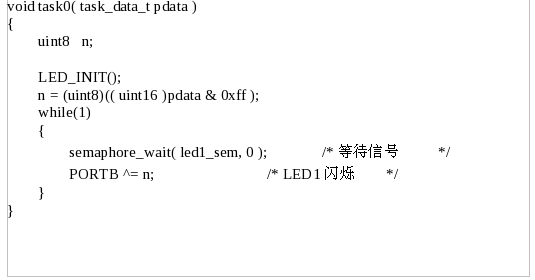
从上很明确可以看出,线程执行的代码体对应于函数,而进程执行的代码则是对应于程序,二者明显是不同的。正因为此,线程之间可以共享全局数据。
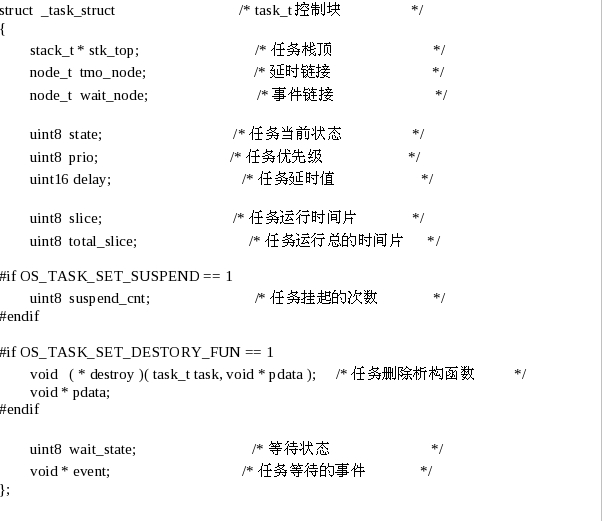
在嵌入式系统中,一般直接称线程为“任务”。任务只是逻辑上的一种抽像。cpu只知道简单的取指-译码-执行,没有多任务的概念。为了表征这一抽像,这里采用了以下数据类型表示:

在实际的系统中,一个任务除了包含它所执行代码(即前面的函数)外,还包含了一块内存区域。该块内存为上述结构体的实例。task_struct结构体存储了任务的运行状态。在os中,通过保存和恢复任务的状态至上述结构体中,来实现任务的停止和恢复运行。可以认为task_struct结构唯一对应一任务。任务通过执行任务代码的活动状态反映其存在。相关的概念请参考操作系统原理方面的书籍。
3、队列结构的设计
在eos中,同时存在多个任务,任务间相互竞争资源。然会资源的数量总是有限的,以CPU为例,cpu只有一个,而任务有多个。除了某一个任务外,其的任务必须等待。具体的表现为:资源被其它资源占用时,将需要等待的任务置入某个FIFO结构,或是LIFO结构中;资源可用时,再从队列中取task_struct结构,将资源分配给对应的任务。等待cpu的队列称为就绪队列,队列结构的设计以及如何向队列中插入与删除task_struct结构就决定了操作系统中说的调度器的调度策略。
当然,队列的实现是多样的。ucos中使用的是位图,占用空间小,操作快速。但其是以每个优先级只能有一个任务为前提的。eos中,设置了多个优先级,同优先级内允许多个任务存在,显然再使用位图是不合适的。因而,需要一种不同的实现。
首先考虑队列实现的要求。
1、eos中任务有多种优先级,而优先级最高的任务具有获取资源的最高优先权。因而,有必要维护多级队列,每个队列对应于某一优先级。同一优先级内的各任务间获取资源的方式按FIFO/或LIFO方式进行,以保证一定的公平性;
2、提供依据任务的优先级插入到相应的队列结构操作;
3、提供从队列中取出最高优先级任务的操作,因为优先级任务高的任务有优先权,这样当事件发生时,从队列中唤醒的首先是最高优先级的任务;
4、提供队列中任意任务的删除操作;一种情况是,当任务被删除时,如果其被阻塞在某个队列中,必须将其从队列中移除;
5、其它的一些操作:队列的判空,返回队列中任务的最高优先级等。
4、队列结构的实现 ?
? 下图是一多级队列的示意图,为方便起见,多级队列中只画出了一级队列。该单级队列被组织成双向链表的结构。同时为使得操作能按FIFO/LIFO方式,队列提供了.front, .rear指针分别指示队首、队末。

1)、结点结构
node_t对应的结构实现如下:
? node_t结构用于链接task_struct结构.前面的 task_struct结构中,维护了两个node_t结构:
?node_t tmo_node; /* 延时链接 */
?node_t wait_node; /* 事件链接 */
? 其中tmo_node用于将任务链入延时队列中,wait_node用于将任务置入资源等待队列,如就绪队列,信号量阻塞队列.提供两个结点是必要的,比如,任务在使能了超时等待信号量,那么任务除了挂起在信号量阻塞队列中外,还有必要置入延时队列,显然仅用一个结点是不够的.
既然是任务可能需要同时置入两组队列中,就有必要维护两组指针用于将task_struct链入队列,而考虑到这两种出队入队操作基本一致,因而对这两组指针进行封装成node_t,以提供统一的操作.
? node_t结构中包含有task_struct结构(即task_t).task_t结构保存了当前结点所在task_struct块的指针。考虑到队列中任务间的链接是借助于node_t结构的,即队列的操作的基本元素为node_t结构,而非task_struct结构.当从队列中取出一结点是,得到的是node_t结构,而我们要得到的是task_struct,这时可以从.task域中得到.
另一有用的域为.xlist,其保存了当前结点所在队列的指针。因为结点可能处于多级队列或普通的slist队列中(后面会说明),因而用联合体。.xlist主要方便于将任意结点从队列中删除,这在后面会说明。
对node_t结构提供了一初始化操作:
void task_node_init( task_t task );
同时完成了task_t结构中tmo_node,wait_node的初始化。
2)、单级队列结构
对应于上图所示的多级队列图,单级队列只是图中的一级队列。
对其中一级队列,其表示为:
struct _slist_t /* 双向队列 */
{
? struct _node_t * front; /* 队首指针 */
? struct _node_t * rear; /* 队尾指针 */
};
.front为队列出指针,指向队列的第一个结构,.rear为队列出指针,指向队列中最后一结点。
其基本的操作为:

可以看出,slist的操作并不是严格按照FIFO方式进行的,同时提供了LIFO方式,以及任意结点的删除操作。
注意 void slist_del_node( node_t * node )操作。其参数只有node,而没有队列指针,原因在于结点所在的队列可以通过node_t结构中的xslist域获得。当然,可以在slist_del_node中引入slist_t * list 参数,但这个参数由何而来?当删除一个任务时,如果任务此时挂在某个队列中,必然要将其移除,但挂在哪个队列,显然队列的信息必然要保存在task_struct中。更进一步,保存在node_t中,可达到同样的效果,并不多占用存储空间,而且操作更为方便,此时只需要关注node_t结构,而不需考虑task_struct结构。
5、mlist多级队列结构
mlist队列单级队列slist_t的组合,但增加了优先级的限定。

\
task_tbl域为slist_t的数组,数组0对应的队列优先级最高,意味着在竞争资源时有较高的优先权。prio_grp和prio_tbl域用于位图式的快速查找,使用的是ucos的位图查找法,也是查找最高优先级,但这里查找的是有任务的队列,而不是任务。对于其方法,这里也不作介绍,请参考源码或ucos源码分析的书籍。
基本操作为:
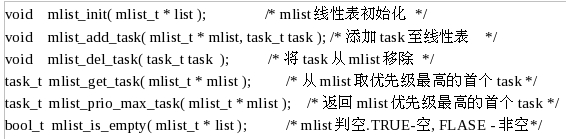
对mlist_t操作的对像是task,而不再是node_t,实际的链接结点仍为node_t。考虑mlist只用于阻塞队列,而任务链入任何阻塞队列只用到wait_node,所以在操作的输入输出上均使用task对像,应用起来更方便。
6、多样的内核队列
eos是如何应用前面提到的多级队列(mlist_t), 单级队列(slist_t )的?
延时队列的实现:
在任务需要暂停执行,等待指定的时间后再恢复时,会被置入延时队列中等待。在系统每个时钟中断发生后,对延时队列中的任务进行处理,当任务的延时期到后,将任务从队列移除。显然,我们只需要关心任务的延时值是否会达到,而不考虑优先级。所以,直接应用slist_t来表示即可。任务入队列从队末入,只要延时到,就从队列删除,slist_t对应的操作可以完成这类需要。
就绪队列的实现:
就绪队列里的任务在竞争cpu的运行。前面提到,eos的任务有多种优先级,优先级最高的任务有优先获得cpu 的机会。为达到此目的,使用mlsit_t来组织就绪的任务。
延时队列和就绪队列的定义如下:

阻塞队列的实现:
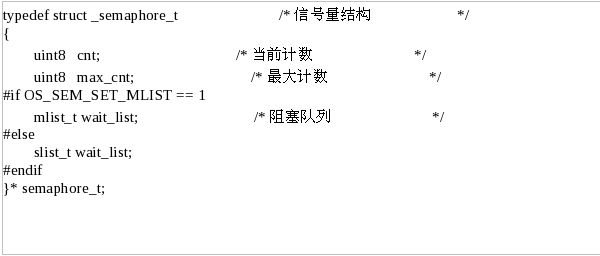
任务在等待获取资源时,需要进入相应的资源等待队列。当资源可用时,依据不同的策略,即可以按照FIFO的方式将资源分配给最先进入队列的任务,也可以按照优先级分配资源给优先级最高的任务,同一优先级间按FIFO方式进行。对于后者,队列结构要占有更多的存储空间。在一些情况下,进入同一队列的各任务的优先级总是相同的,因为就可选用单级队列,以减少存储空间,同时也提高了操作效率。在eos的信号量实现中,同时支持这两种方式。以下是信号量的结构,通过条件编译可选择阻塞队列的类型.
6、总结
上述的slist_t, mlist_t结构及其操作还是比较简单和易于理解的,在一般的《数据结构》教材中都会有所讲述。但是相对于教材中提到的结构,这里的实现相对而言要复杂些,但效率更高,操作也更加方便。特别是关于node_t结点,我最初的想法是直接在task_struct结构体中提供两组指针,用于分别进行链接,后经反复修改,同时参考了freertos等内核的源码,稍作了一些调整,从后面的关于任务调度和诸如信号量等待实现的效果来看,这种队列还是比较有效的。并且提供的操作,其执行是可确定,可预知的。
很显然,这类实现占用的存储空间较大。当优先级数增多时,多级队列占用的存储空间也会相应增大。这对于只有2K ram的单片机来说,显得有些臃肿。
7、源码与资料
涉及源码文件:
list.c / list.h ------------ 队列结构实现
core.h ----------------- task_struct结构定义




 /2
/2 





文章评论(0条评论)
登录后参与讨论