准备
在移植之前,我们首先要获取到FreeRTOS的官方的源码包。这里我们提供两个下载链接:
一个是官网:http://www.freertos.org/
另外一个是代码托管网站:https://sourceforge.net/projects/freertos/files/FreeRTOS/
这里我们演示如何在代码托管网站里面下载。打开网站链接之后,我们选择FreeRTOS的最新版本V9.0.0(2016年),尽管现在FreeRTOS的版本已经更新到V10.0.1了,但是我们还是选择V9.0.0,因为内核很稳定,并且网上资料很多,因为V10.0.0版本之后是亚马逊收购了FreeRTOS之后才出来的版本,主要添加了一些云端组件,我们本书所讲的FreeRTOS是实时内核,采用V9.0.0版本足以。
简单介绍FreeRTOS
FreeRTOS包含Demo例程和内核源码(比较重要,我们就需要提取该目录下的大部分文件)。
Source文件夹里面包含的是FreeRTOS内核的源代码,我们移植FreeRTOS的时候就需要这部分源代码;
Demo 文件夹里面包含了FreeRTOS官方为各个单片机移植好的工程代码,FreeRTOS为了推广自己,会给各种半导体厂商的评估板写好完整的工程程序,这些程序就放在Demo这个目录下,这部分Demo非常有参考价值。
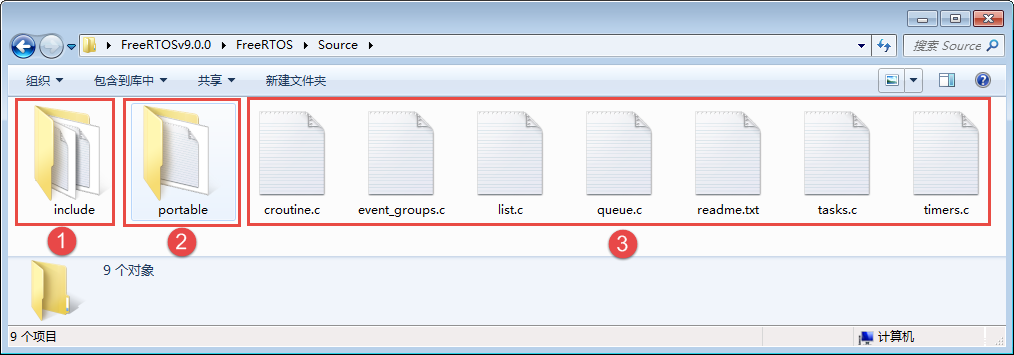
Source文件夹
这里我们再重点分析下FreeRTOS/ Source文件夹下的文件,①和③包含的是FreeRTOS的通用的头文件和C文件,这两部分的文件试用于各种编译器和处理器,是通用的。需要移植的头文件和C文件放在②portblle这个文件夹。
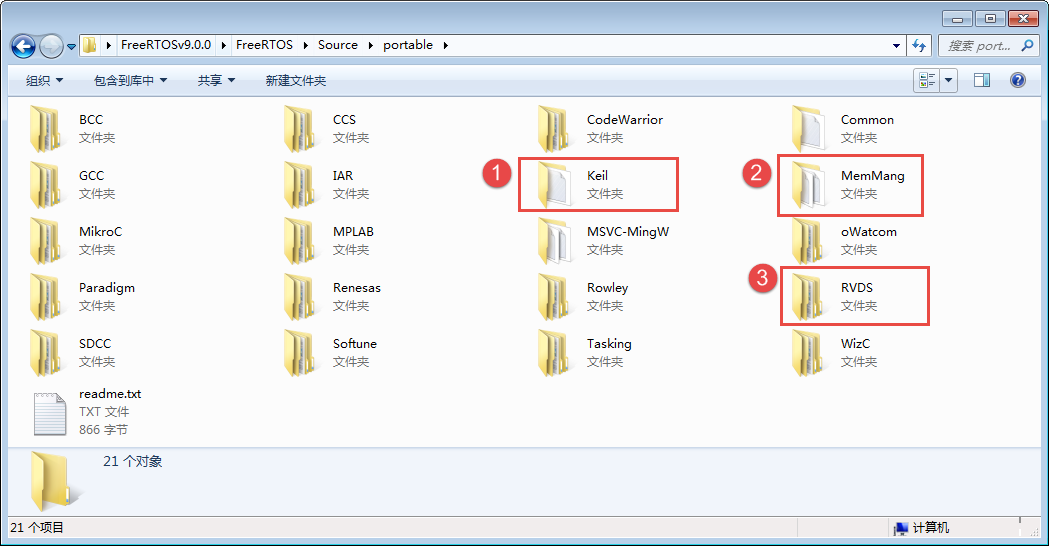
portblle文件夹,是与编译器相关的文件夹,在不同的编译器中使用不同的支持文件。①中的KEIL就是我们就是我们使用的编译器,其实KEIL里面的内容跟RVDS里面的内容一样,所以我们只需要③RVDS文件夹里面的内容即可,里面包含了各种处理器相关的文件夹,从文件夹的名字我们就非常熟悉了,我们学习的STM32有M0、M3、M4等各种系列,FreeRTOS是一个软件,单片机是一个硬件,FreeRTOS要想运行在一个单片机上面,它们就必须关联在一起。MemMang文件夹下存放的是跟内存管理相关的源文件。
移植过程提取源码
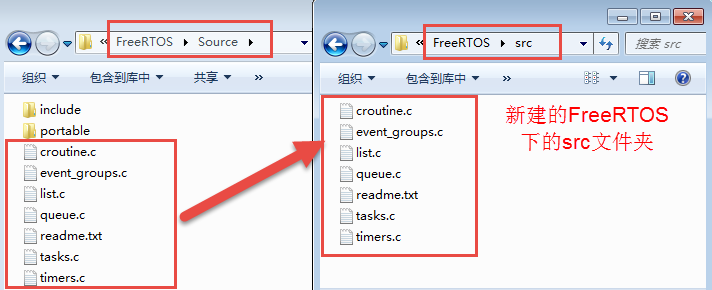
- 首先在我们的STM32裸机工程模板根目录下新建一个文件夹,命名为“FreeRTOS”,并且在FreeRTOS文件夹下新建两个空文件夹,分别命名为“src”与“port”,src文件夹用于保存FreeRTOS中的核心源文件,也就是我们常说的‘.c文件’,port文件夹用于保存内存管理以及处理器架构相关代码,这些代码FreeRTOS官方已经提供给我们的,直接使用即可,在前面已经说了,FreeRTOS是软件,我们的开发版是硬件,软硬件必须有桥梁来连接,这些与处理器架构相关的代码,可以称之为RTOS硬件接口层,它们位于FreeRTOS/Source/Portable文件夹下。
- 打开FreeRTOS V9.0.0源码,在“FreeRTOSv9.0.0\FreeRTOS\Source”目录下找到所有的‘.c文件’,将它们拷贝到我们新建的src文件夹中,
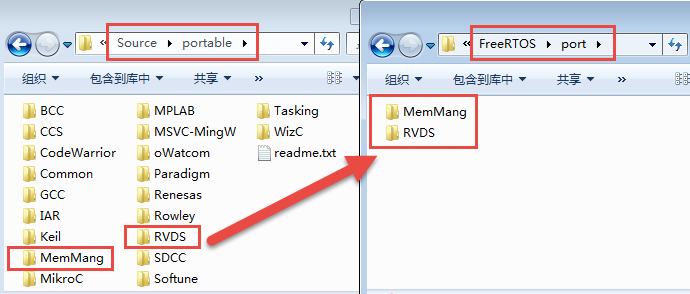
- 打开FreeRTOS V9.0.0源码,在“FreeRTOSv9.0.0\FreeRTOS\Source\portable”目录下找到“MemMang”文件夹与“RVDS”文件夹,将它们拷贝到我们新建的port文件夹中
- 打开FreeRTOS V9.0.0源码,在“FreeRTOSv9.0.0\ FreeRTOS\Source”目录下找到“include”文件夹,它是我们需要用到FreeRTOS的一些头文件,将它直接拷贝到我们新建的FreeRTOS文件夹中,完成这一步之后就可以看到我们新建的FreeRTOS文件夹已经有3个文件夹,这3个文件夹就包含FreeRTOS的核心文件,至此,FreeRTOS的源码就提取完成。

添加到工程
添加FreeRTOSConfig.h文件
FreeRTOSConfig.h文件是FreeRTOS的工程配置文件,因为FreeRTOS是可以裁剪的实时操作内核,应用于不同的处理器平台,用户可以通过修改这个FreeRTOS内核的配置头文件来裁剪FreeRTOS的功能,所以我们把它拷贝一份放在user这个文件夹下面。
打开FreeRTOSv9.0.0源码,在“FreeRTOSv9.0.0\FreeRTOS\Demo”文件夹下面找到“CORTEX_STM32F103_Keil”这个文件夹,双击打开,在其根目录下找到这个“FreeRTOSConfig.h”文件,然后拷贝到我们工程的user文件夹下即可,等下我们需要对这个文件进行修改。
创建工程分组
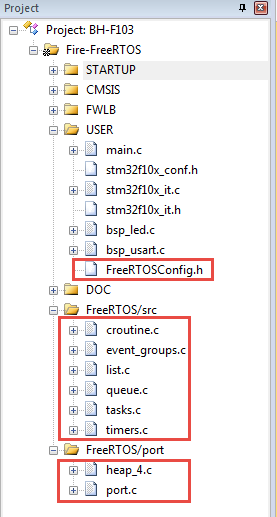
接下来我们在mdk里面新建FreeRTOS/src和FreeRTOS/port两个组文件夹,其中FreeRTOS/src用于存放src文件夹的内容,FreeRTOS/port用于存放port\MemMang文件夹 与port\RVDS\ARM_CM3文件夹的内容。
然后我们将工程文件中FreeRTOS的内容添加到工程中去,按照已经新建的分组添加我们的FreeRTOS工程源码。
在FreeRTOS/port分组中添加MemMang文件夹中的文件只需选择其中一个即可,我们选择“heap_4.c”,这是FreeRTOS的一个内存管理源码文件。
添加完成后:
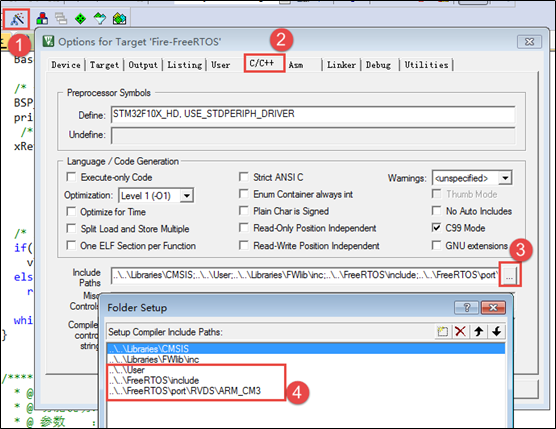
** 添加头文件路径**
FreeRTOS的源码已经添加到开发环境的组文件夹下面,编译的时候需要为这些源文件指定头文件的路径,不然编译会报错。FreeRTOS的源码里面只有FreeRTOS\include和FreeRTOS\port\RVDS\ARM_CM3这两个文件夹下面有头文件,只需要将这两个头文件的路径在开发环境里面指定即可。同时我们还将FreeRTOSConfig.h这个头文件拷贝到了工程根目录下的user文件夹下,所以user的路径也要加到开发环境里面。
修改FreeRTOSConfig.h
FreeRTOSConfig.h是直接从demo文件夹下面拷贝过来的,该头文件对裁剪整个FreeRTOS所需的功能的宏均做了定义,有些宏定义被使能,有些宏定义被失能,一开始我们只需要配置最简单的功能即可。要想随心所欲的配置FreeRTOS的功能,我们必须对这些宏定义的功能有所掌握,下面我们先简单的介绍下这些宏定义的含义,然后再对这些宏定义进行修改。
修改stm32f10x_it.c
SysTick中断服务函数是一个非常重要的函数,FreeRTOS所有跟时间相关的事情都在里面处理,SysTick就是FreeRTOS的一个心跳时钟,驱动着FreeRTOS的运行,就像人的心跳一样,假如没有心跳,我们就相当于“死了”,同样的,FreeRTOS没有了心跳,那么它就会卡死在某个地方,不能进行任务调度,不能运行任何的东西,因此我们需要实现一个FreeRTOS的心跳时钟,FreeRTOS帮我们实现了SysTick的启动的配置:在port.c文件中已经实现vPortSetupTimerInterrupt()函数,并且FreeRTOS通用的SysTick中断服务函数也实现了:在port.c文件中已经实现xPortSysTickHandler()函数,所以移植的时候只需要我们在stm32f10x_it.c文件中实现我们对应(STM32)平台上的SysTick_Handler()函数即可。FreeRTOS为开发者考虑得特别多,PendSV_Handler()与SVC_Handler()这两个很重要的函数都帮我们实现了,在在port.c文件中已经实现xPortPendSVHandler()与vPortSVCHandler()函数,防止我们自己实现不了,那么在stm32f10x_it.c中就需要我们注释掉PendSV_Handler()与SVC_Handler()这两个函数了。
//void SVC_Handler(void)//{//}//void PendSV_Handler(void)//{//}extern void xPortSysTickHandler(void);//systick中断服务函数void SysTick_Handler(void){ #if (INCLUDE_xTaskGetSchedulerState == 1 )if (xTaskGetSchedulerState() != taskSCHEDULER_NOT_STARTED){#endif /* INCLUDE_xTaskGetSchedulerState */ xPortSysTickHandler();#if (INCLUDE_xTaskGetSchedulerState == 1 )}#endif /* INCLUDE_xTaskGetSchedulerState */}复制代码 创建任务
这里,我们创建一个单任务,任务使用的栈和任务控制块是在创建任务的时候FreeRTOS动态分配的。
任务必须是一个死循环,否则任务将通过LR返回,如果LR指向了非法的内存就会产生HardFault_Handler,而FreeRTOS指向一个死循环,那么任务返回之后就在死循环中执行,这样子的任务是不安全的,所以避免这种情况,任务一般都是死循环并且无返回值的。
并且每个任务循环主体中应该有阻塞任务的函数,否则就会饿死比它优先级更低的任务!!!
/* FreeRTOS头文件 */#include "FreeRTOS.h"#include "task.h"/* 开发板硬件bsp头文件 */#include "bsp_led.h"static void AppTaskCreate(void);/* AppTask任务 *//* 创建任务句柄 */static TaskHandle_t AppTask_Handle = NULL;int main(void){ BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS *//* 开发板硬件初始化 */BSP_Init();/* 创建AppTaskCreate任务 */xReturn = xTaskCreate((TaskFunction_t )AppTask, /* 任务入口函数 */(const char* )"AppTask",/* 任务名字 */(uint16_t )512, /* 任务栈大小 */(void* )NULL,/* 任务入口函数参数 */(UBaseType_t )1, /* 任务的优先级 */(TaskHandle_t* )&AppTask_Handle);/* 任务控制块指针 */ /* 启动任务调度 */ if(pdPASS == xReturn)vTaskStartScheduler(); /* 启动任务,开启调度 */elsereturn -1; while(1); /* 正常不会执行到这里 */ }static void AppTask(void* parameter){ while (1){LED1_ON;vTaskDelay(500); /* 延时500个tick */LED1_OFF; vTaskDelay(500); /* 延时500个tick */ }}复制代码 转载于:
https://www.cnblogs.com/iot-dev/p/11681067.html版权归原作者所有。



 /5
/5 






文章评论(0条评论)
登录后参与讨论