
软件滤波器可提高信号测量的稳定性和精度
作者:Bob Dvorak
在高噪音或干扰大条件下,小型或嵌入信号测量有足够精度和(或)稳定性的稳定信号。本文介绍一个简单的软件滤波器,借助该软件滤波器,成本低廉的嵌入式控制系统能够大幅提高精密测量的稳定性。
最初开发下面算法是为了检测毫安培信号中的微安培变化,后来被用到多种不同的应用上。简单系统中的传统测量方法包括多样本平均或连续积分。
但存在的问题是:数据点的分散性可能太大,导致不能得到一个可重复的答案;某种类型的干扰(特别是大多数开关电源的干扰)将使综合后的结果(integrated answer)出现误差。
换句话说,真正的统计分析可能耗尽嵌入式处理器的资源。
该算法假定执行大量序列测量(比如近似连续的模数转换器(ADC)可能发出序列检测)的能力能平均分配以得到最终结果。少量的交叉处理(在等待下一个ADC结果的时候)和后处理可提供一个对大多数单个结果有利的结果。
存储阵列被分配用来为后续处理保存每一个结果。样本数量则根据不同需求和资源而有所不同。在获得最后样本之后,计算样本的算术平均值,并将每个样本(阵列元件)与平均值进行比较。对一个方向(>或者<)上的结果以及偏差进行累计(其平均值等于另一个方向的平均值),根据下列公式计算平均值:
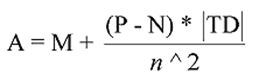
其中,A是修正过的结果,M是算术平均值,P是大于M的样本号,N是小于M的样本号,TD是由平均值得出的总偏差(仅绝对值和一个方向上的偏差),而n是样本号。
例如,设想一个简单系统取10个样本,得到的结果是10、10、10、10、10、20、10、10、10和10。不考虑明显误差的结果可能会被删除这个事实,继续这个过程,得到的平均数是11。正样本数为1,负样本数为9(因此P?CN =-8)。从平均数得来的任一方向的总偏差是9。偏差系数是-72,该系数被n的平方(100)除,得到修正指数-0.72。
这个算法适应于随机散射,也适用于寄生干扰。请注意,正弦误差将导致P-N=0,或者是平均数无偏差。对于许多数学家来说,一个有趣的家庭作业是用不同值的n来计算各种类型干扰的排斥比(rejection ratio)。



 /3
/3 







文章评论(0条评论)
登录后参与讨论