Intel зҘһз»Ҹи®Ўз®—жЈ’NCS2з®Җд»Ӣ
иӢұзү№е°”NCS 2з”ұжңҖж–°дёҖд»Јзҡ„иӢұзү№е°”VPUпјҲи§Ҷи§үеӨ„зҗҶеҚ•е…ғпјүж”ҜжҢҒвҖ“иӢұзү№е°”Movidius Myriad X VPUгҖӮиҝҷжҳҜ第дёҖдёӘе…·жңүзҘһз»Ҹи®Ўз®—еј•ж“Һзҡ„VPUпјҢеҸҜжҸҗдҫӣйўқеӨ–зҡ„жҖ§иғҪгҖӮиҜёеҰӮCaffeпјҢTensor FlowжҲ–MXNetд№Ӣзұ»зҡ„ж·ұеәҰеӯҰд№ зҘһз»ҸзҪ‘з»ңеҸҜд»ҘдёҺNCS2дёҠзҡ„OpenVINOе·Ҙе…·еҢ…йӣҶжҲҗгҖӮиҝҷдәӣжңәеҷЁеӯҰд№ жЎҶжһ¶й’ҲеҜ№е…Ёж–°зҡ„ж·ұеәҰзҘһз»ҸзҪ‘з»ңпјҲDNNпјүжҺЁзҗҶеј•ж“ҺиҝӣиЎҢдәҶдјҳеҢ–пјҢиҜҘеј•ж“ҺжҸҗдҫӣзҡ„жҖ§иғҪжҳҜеүҚдёҖд»Јзҡ„е…«еҖҚгҖӮеҖҹеҠ©з”өи„‘е’ҢIntel NCS2пјҢејҖеҸ‘дәәе‘ҳеҸҜд»ҘеҗҜеҠЁе…¶AIе’Ңи®Ўз®—жңәи§Ҷи§үеә”з”Ёзҡ„ејҖеҸ‘пјҢ并еңЁеҮ еҲҶйҗҳеҶ…жү§иЎҢгҖӮиӢұзү№е°”NCS2еңЁж Үжә–USB 3.0дёҠиҝҗиЎҢпјҢдёҚйңҖиҰҒе…¶д»–зЎ¬дҪ“пјҢд»ҺиҖҢдҪҝз”ЁжҲ·иғҪеӨҹж— зјқиҪ¬жҚўз”ұз”өи„‘и®ӯз»ғеҘҪзҡ„жЁЎеһӢпјҢ然еҗҺе°Ҷе…¶йғЁзҪІеҲ°еҗ„з§Қиҫ№зјҳи®ҫеӨҮиҖҢдёҚйңҖиҝһзҪ‘жҲ–иҝһдә‘гҖӮ
ж— и®әжҳҜејҖеҸ‘жҷәиғҪзӣёжңәпјҢе…·жңүжүӢеҠҝиҜҶеҲ«еҠҹиғҪзҡ„ж— дәәжңәпјҢе·ҘдёҡжңәеҷЁдәәпјҢиҝҳжҳҜдёӢдёҖд»ЈжҷәиғҪ家еұ…и®ҫеӨҮпјҢиӢұзү№е°”зҘһз»Ҹи®Ўз®—жЈ’2йғҪиғҪдёәејҖеҸ‘дәәе‘ҳжҸҗдҫӣжӣҙеҝ«еЎ¬еһӢжүҖйңҖзҡ„еҠҹиғҪгҖӮ
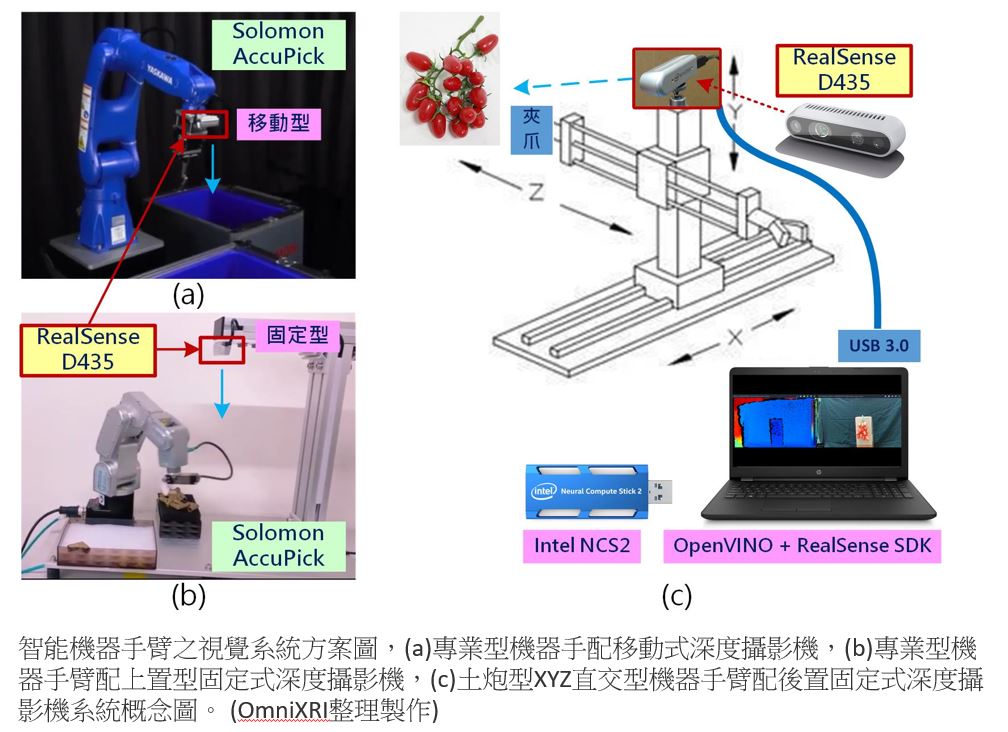
жҷәиғҪжңәеҷЁжүӢиҮӮд№Ӣи§Ҷи§үзі»з»ҹж–№жЎҲ
жҺҘдёӢжқҘд»Ӣз»Қиҝҷжңүи¶Јзҡ„жҷәиғҪжңәеҷЁжүӢиҮӮд№Ӣи§Ҷи§үзі»з»ҹж–№жЎҲпјҢжң¬ж–№жЎҲжҳҜз”ұи®ёе“ІиұӘ Jack ејҖеҸ‘зҡ„гҖӮJack жҳҜеё®еҝҷIntel дёҺSertek жҺЁе№ҝIntel OpenVINO дёҺIntel NCS2 зҡ„专家гҖӮеҰӮжһңеӨ§еӨ§йҖҡзҡ„еҘҪжңӢеҸӢ们пјҢеҜ№AI зҡ„еә”з”ЁдёҺејҖеҸ‘жңүе…ҙи¶ЈеҸҜд»ҘеҲ°Jack зҡ„зҪ‘з«ҷhttp://omnixri.blogspot.com/ еңЁиҝҷиЈЎеҸҜд»ҘжҢ–еҲ°еҫҲеӨҡе®қе–”гҖӮ
ж–№жЎҲзӣ®ж Ү
жң¬ж–№жЎҲеёҢжңӣйҖҸиҝҮзү©д»¶(е°Ҹи•ғиҢ„)ж ҮиЁ»гҖҒи®ӯз»ғгҖҒжҺЁи®ә(дҫҰжөӢ)еҸҠж·ұеәҰиө„и®Ҝж•ҙеҗҲзҡ„жЎҶжһ¶еҸҠе·ҘдҪңжөҒзЁӢжқҘи®©иҜ»иҖ…дәҶи§ЈAI еә”з”ЁејҖеҸ‘зҡ„жөҒзЁӢпјҢи§ЈеҶіиҮӘеҠЁи®Ўз®—е°Ҹи•ғиҢ„(ж°ҙжһң)з©әй—ҙдҪҚзҪ®(XYZ)пјҢеҲ©з”Ёж·ұеәҰж„ҹжөӢеҷЁIntel RealSense D435(д»ҘдёӢз®Җз§°D435)еҸҠзҘһз»Ҹиҝҗз®—жЈ’дәҢд»ЈIntel Neural Compute Stick 2(д»ҘдёӢз®Җз§°NCS2)еҠ дёҠејҖжәҗи§Ҷи§үжҺЁи®әеҸҠзҘһз»ҸзҪ‘и·ҜдјҳеҢ–е·Ҙе…·еҢ…Intel OpenVINO (иҮӘеёҰз®ҖеҢ–зүҲOpenCV 3.4.1)жқҘиҜҙжҳҺдёҺе®һдҪңдёҖдёӢгҖҢжҷәиғҪжңәеҷЁжүӢиҮӮзҡ„и§Ҷи§үзі»з»ҹгҖҚгҖӮ
жң¬ж–№жЎҲдё»иҰҒжҳҜеҲ©з”ЁD435ж’·еҸ–еҲ°зҡ„еҪ©иүІеҪұеғҸз»“еҗҲж·ұеәҰеӯҰд№ зҡ„зү©д»¶е®ҡдҪҚз®—жі•YOLOv3жүҫеҲ°ж°ҙжһңдҪҚзҪ®(X,Y)пјҢеҪ“CPUз®—еҠӣдёҚи¶іж—¶иҝҳеҸҜдҪҝз”ЁIntel GPUжҲ–VPU(NCS2)еҠ йҖҹи®Ўз®—пјҢжңҖеҗҺеҶҚеҠ дёҠD435ж’·еҸ–еҲ°зҡ„ж·ұеәҰеҪұеғҸжүҖеҜ№еә”дҪҚзҪ®зҡ„ж·ұеәҰ(Z)иө„и®ҜпјҢжңӘжқҘе°ұеҸҜд»Ҙи®©жңәеҷЁжүӢиҮӮжӯЈзЎ®ең°дјёеҲ°жӯЈзЎ®з©әй—ҙдҪҚзҪ®(XYZ)еӨ№еҸ–еҸҠж‘ҳеҸ–(еүӘеҲҮ)ж°ҙжһңдәҶгҖӮ
YOLOv3и®ӯз»ғе°Ҹи•ғиҢ„еҪұеғҸ
жң¬ж–№жЎҲдё»иҰҒжҳҜд»Ҙе°Ҹи•ғиҢ„еҒҡдёәжңәжў°жүӢиҮӮи§Ҷи§үзі»з»ҹзҡ„жЁЎжӢҹжҺЎж”¶еҜ№иұЎпјҢдҪҶжҳҜдёҖиҲ¬еёёи§ҒејҖж”ҫиө„ж–ҷйӣҶ(еҰӮImageNet, MS COCO)йғҪжІЎжңүеҗҲйҖӮзҡ„пјҢжүҖд»ҘеҸӘеҘҪиҮӘе·ұ收йӣҶгҖҒж ҮиЁ»иө„ж–ҷйӣҶгҖӮз”ұдәҺж’°еҶҷжң¬ж–Үж—¶йқһз”ҹдә§еӯЈиҠӮеҠ дёҠжІЎжңүеҗҲдҪңзҡ„дјҷдјҙеҸҜд»ҘжҸҗдҫӣе®һйҷ…еҶңеңәеҸ–еғҸпјҢдәҺжҳҜеҸӘеҘҪдёҠзҪ‘д№°дәҶдёҖдёІеЎ‘иғ¶иЈҪзҡ„е°Ҹи•ғиҢ„пјҢеӨ–и§ӮзңӢиө·жқҘйқһеёёйҖјзңҹпјҢдҪңдёәжң¬ж¬Ўе®һйӘҢзҡ„еҜ№иұЎгҖӮ
жң¬ж¬Ўе®һйӘҢеҸ–еғҸеҸҠжөӢиҜ•зҡ„зҺҜеўғеҰӮеӣҫ1жүҖзӨәгҖӮ笔з”өдёҠйў„е…ҲиЈ…еҘҪRealSense
SDKеҸҠOpenVINO SDKпјҢ并жҸ’е…ҘзҘһз»Ҹиҝҗз®—жЈ’(Intel NCS 2)дҪңдёәеҠ йҖҹи®Ўз®—з”ЁгҖӮRealSense D435жҸ’е…Ҙ笔з”өзҡ„USB 3.0еҹ (дёҚж”ҜжҸҙUSB
2.0)пјҢе°Ҹи•ғиҢ„и·қзҰ»D435зәҰ30е…¬еҲҶпјҢеҲҶеҲ«еҜ№е°Ҹи•ғиҢ„жӯЈйқўе’ҢиғҢйқўеҸ–еғҸдҪңдёәж ·жң¬гҖӮдёәдәҶеҝ«йҖҹеҸ–еҫ—еӨ§йҮҸж ·жң¬пјҢд»Өж‘„еҪұжңәжҜҸйҡ”10дёӘеҪұж ј(0.33з§’)жӢҚдёҖеј з…§пјҢжӢҚж‘„жңҹй—ҙд»ҘжүӢ移еҠЁе°Ҹи•ғиҢ„дҪҚзҪ®еҸҠи§’еәҰпјҢд»ҘиҺ·еҫ—жӣҙеӨҡж ·жҖ§зҡ„ж ·жң¬гҖӮ
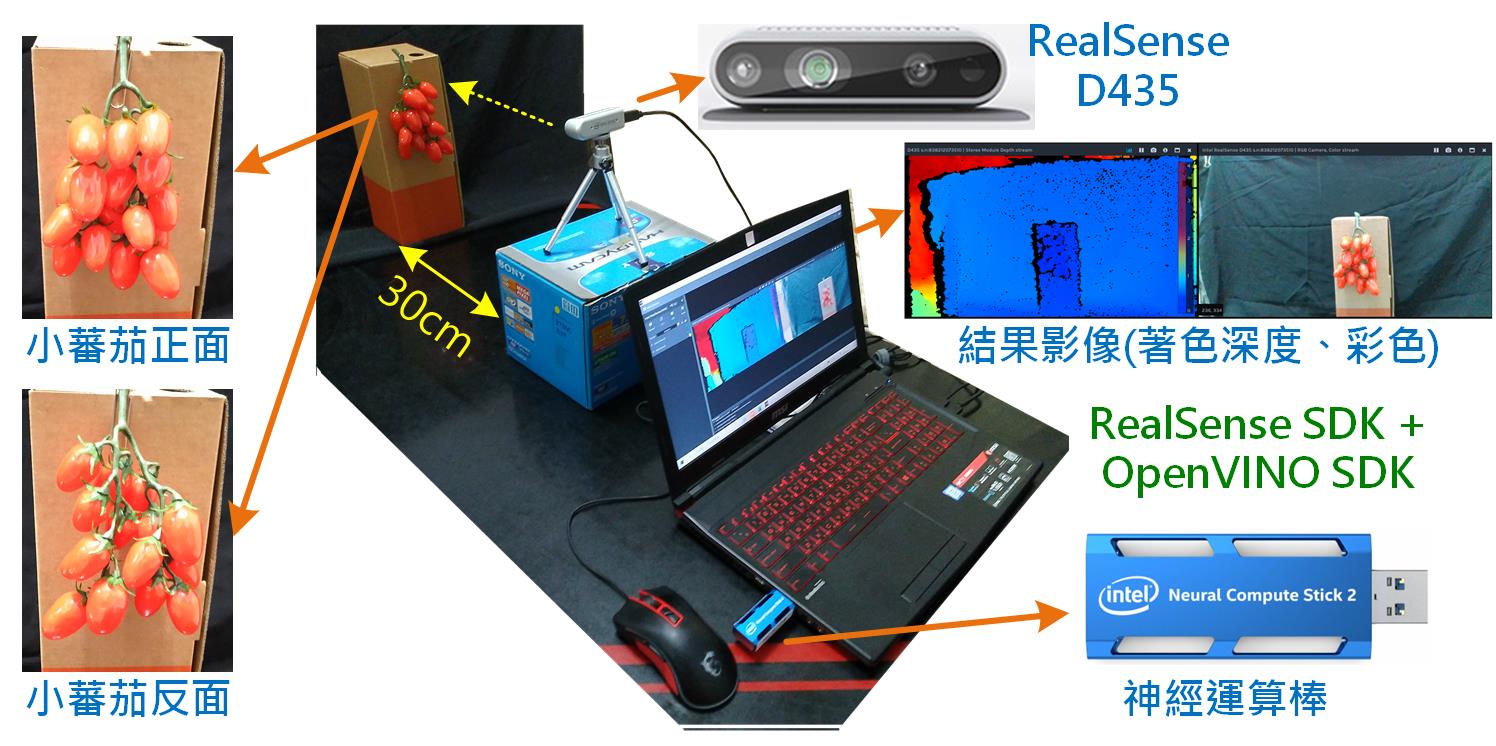
еӣҫ1
еҸ–еғҸеҸҠжөӢиҜ•е·ҘдҪңзҺҜеўғзӨәж„Ҹеӣҫ(OmniXRIж•ҙзҗҶиЈҪдҪң)
дёәдәҶиҠӮзңҒеҗҺз»ӯж ҮиЁ»еҸҠи®ӯз»ғж—¶й—ҙпјҢжүҖд»ҘеҸӘеҸ–еҫ—жӯЈйқў92еј пјҢиғҢйқў79еј пјҢеҗҲи®Ў171еј ж ·жң¬еҪұеғҸгҖӮеҪ“然иҝҷж ·зҡ„ж•°йҮҸеҜ№ж·ұеәҰеӯҰд№ зҡ„и®ӯз»ғжҳҜйқһеёёдёҚеӨҹзҡ„пјҢиҝҷиЈЎеҸӘжҳҜдёәдәҶиҜҙжҳҺе·ҘдҪңжөҒзЁӢпјҢжүҖд»ҘжҡӮж—¶еҝҪз•ҘеҗҺз»ӯи®ӯз»ғеҸҠдҫҰжөӢжӯЈзЎ®жҖ§зҡ„й«ҳдҪҺгҖӮз”ұдәҺеҰӮдҪ•ж ҮиЁ»гҖҒи®ӯз»ғиө„ж–ҷйӣҶзҡ„е·ҘдҪңжӯҘйӘӨйўҮеӨҡпјҢжүҖд»ҘиҜ·зӣҙжҺҘеҸӮиҖғгҖҗAI_ColumnгҖ‘еҰӮдҪ•д»ҘYOLOv3и®ӯз»ғиҮӘе·ұзҡ„иө„ж–ҷйӣҶв”Җд»Ҙе°Ҹи•ғиҢ„дёәдҫӢ[10]гҖӮ
з»ҸеҲқжӯҘжөӢиҜ•еҗҺпјҢжӯЈзЎ®зҺҮе®һеңЁжңүзӮ№зіҹзі•пјҢеҸҜиғҪжҳҜе°Ҹи•ғиҢ„(еҫ…дҫҰжөӢзү©д»¶)йҮҚеҸ зҡ„еӨӘдёҘйҮҚдё”и®ӯз»ғеҸҠйӘҢиҜҒйӣҶзҡ„ж•°йҮҸеӨӘе°‘пјҢеҗҢж—¶еҸҲжІЎжңүеҲ©з”Ёиө„ж–ҷжү©еўһжүӢж®өж”№е–„гҖӮеӣ жӯӨеҸӘиғҪе…Ҳз”Ёи®ӯз»ғйӣҶжқҘе……еҪ“жөӢиҜ•йӣҶпјҢеҪ“然иҝҷеҸӘжҳҜдёәдәҶж–№дҫҝи§ЈйҮҠеҗҺйқўзҡ„е·ҘдҪңжөҒзЁӢпјҢдёҖиҲ¬жӯЈеёёжғ…еҶөдёӢжҳҜз»қдёҚе…Ғи®ёжӢҝи®ӯз»ғйӣҶжҲ–йӘҢиҜҒйӣҶжқҘжөӢиҜ•зҡ„пјҢеӣ дёәиҝҷж ·еҫҲе®№жҳ“иҗҪе…ҘиҝҮжӢҹеҗҲеҢәй—ҙйҖ жҲҗжӯЈзЎ®зҺҮдјҡејӮеёёйЈҷй«ҳзҡ„й—®йўҳгҖӮ
иӢҘе…ҲжҺ’йҷӨдёҠиҝ°иҝҮжӢҹеҗҲй—®йўҳпјҢжөӢиҜ•йӣҶиў«жЎҶеҲ°зҡ„е°Ҹи•ғиҢ„ж•°йҮҸжҳҺжҳҫжҜ”е®һйҷ…е°‘еҫҲеӨҡпјҢдё”еҫҲе®№жҳ“еҮәзҺ°иҝҮеӨ§жҲ–иҝҮе°Ҹзҡ„жЎҶпјҢжүҖд»Ҙе°ұеңЁзЁӢејҸдёӯеҠ е…Ҙй•ҝе®Ҫе°әеҜёеҸҠжҜ”дҫӢжқҘйҷҗеҲ¶дёҚжӯЈеёёзҡ„зү©д»¶иў«дҫҰжөӢеҲ°гҖӮз»ҸиҝҮйҷҗеҲ¶еҗҺиў«жЎҶеҲ°зҡ„е°Ҹи•ғиҢ„дҪҚзҪ®еҸҠе°әеҜёеӨ§иҮҙйғҪиҝҳз®—жӯЈзЎ®пјҢеҸҜжҳҜзҪ®дҝЎеәҰй«ҳдҪҺе·®еҫҲеӨҡпјҢжңүдәӣз”ҡиҮідҪҺеҲ°0.1(10%)д»ҘдёӢпјҢжүҖд»ҘеҸӘеҘҪе°ҶзҪ®дҝЎеәҰзҡ„й—Ёж§ӣеҖји®ҫдҪҺдёҖдәӣпјҢжүҚдёҚиҮҙдәҺжүҫдёҚеҲ°д»»дҪ•зү©д»¶пјҢдҪҶзјәзӮ№е°ұжҳҜиҜҜеҲӨзҡ„жңәзҺҮе°ұеўһй«ҳдәҶгҖӮ
иҮідәҺжӯЈйқўеҸҠеҸҚйқўдҪ•иҖ…дҫҰжөӢиҫғдёәжӯЈзЎ®пјҢжӯЈйқўдјҡиҫЁиҜҶзҺҮз•Ҙй«ҳдәҺеҸҚйқўпјҢзҢңжғіеҸҜиғҪжҳҜз»ҝиүІзҡ„и’ӮеӨҙжІЎжңүеҫҲзЎ®е®һиў«и®ӯз»ғеҲ°еҗ§пјҹеҸҰеӨ–иҷҪ然ж ҮиЁ»ж—¶е·Ій’ҲеҜ№йҒ®и”Ҫе°ҸдәҺ1/2зҡ„е°Ҹи•ғиҢ„йғҪжңүеҠ д»Ҙж ҮиЁ»пјҢдҪҶе®һйҷ…дёҠиҫЁиҜҶеҮәжқҘзҡ„з»“жһңд»Қд»ҘеҪўзҠ¶иҫғе®Ңж•ҙзҡ„иў«дҫҰжөӢеҲ°зҡ„жңәзҺҮиҫғй«ҳгҖӮеҰӮеӣҫ2еҚіжҳҜе°Ҹи•ғиҢ„еңЁжӯЈйқўеҸҠеҸҚйқўд»ҘOpenVINOв„ўжү§иЎҢYOLOv3зҡ„дҫҰжөӢз»“жһңгҖӮиҖҢеӣҫ3еҸҠеӣҫ4еҲҶеҲ«жҳҜеЎ¬е§ӢеҪұеғҸеҸҠзү©д»¶дҫҰжөӢз»“жһңеҪұеғҸеҠЁз”»GIFжЎЈзӨәж„ҸжЎЈпјҢе®Ңж•ҙ171еј зүҲеҠЁз”»GIFжЎЈиҜ·еҸӮиҖғ[11]гҖӮ
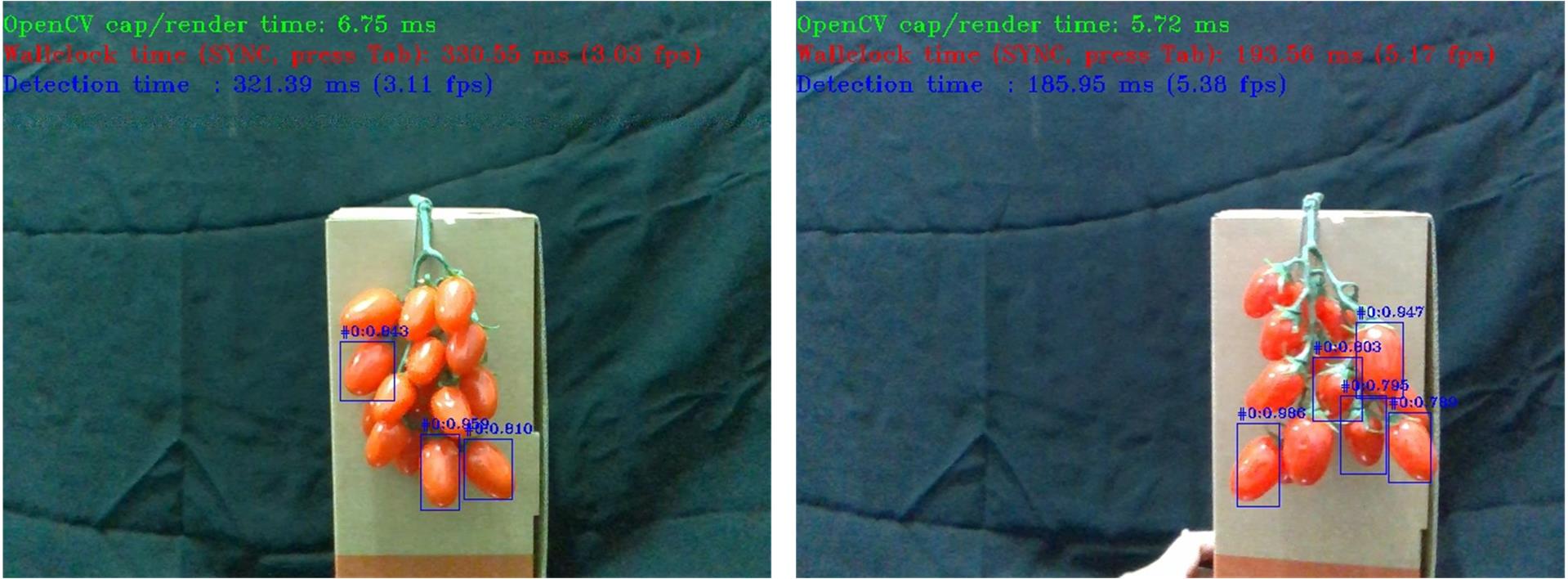
еӣҫ2
е°Ҹи•ғиҢ„дҫҰжөӢз»“жһңеҪұеғҸпјҢе·ҰпјҡжӯЈйқўпјҢеҸіпјҡеҸҚйқўгҖӮ(OmniXRIж•ҙзҗҶиЈҪдҪң)

еӣҫ3
е°Ҹи•ғиҢ„еЎ¬е§ӢеҪұеғҸжЎЈ(OmniXRIж•ҙзҗҶиЈҪдҪң)

еӣҫ4
е°Ҹи•ғиҢ„дҫҰжөӢз»“жһңеҪұеғҸжЎЈ(OmniXRIж•ҙзҗҶиЈҪдҪң)
зү©д»¶дҫҰжөӢеҠ ж·ұеәҰеҪұеғҸж•ҙеҗҲжөӢиҜ•
з»ҸиҝҮеүҚйқўзҡ„еҠӘеҠӣеҗҺз»ҲдәҺеҸҜд»ҘиҝӣеҲ°жңҖеҗҺзҡ„ж•ҙеҗҲйҳ¶ж®өдәҶпјҢйҖҸиҝҮOpenVINOв„ўжү§иЎҢYOLOv3зү©д»¶дҫҰжөӢеҠҹиғҪ并жӯЈзЎ®жүҫеҮәж•°дёӘе°Ҹи•ғиҢ„дҪҚзҪ®еҗҺпјҢжҺҘдёӢжқҘе°ұиҰҒејҖе§ӢеҲӨе®ҡйӮЈдёӘе°Ҹи•ғиҢ„дјҳе…ҲжҺЎж”¶гҖӮдёҖиҲ¬еҶңж°‘дјҡд»ҺжңҖйқ иҝ‘иҮӘе·ұжҲ–жңҖеӨ–еұӮзҡ„ејҖе§ӢжҺЎж”¶пјҢжҚўдёҖдёӘиҜҙжі•е°ұжҳҜи·қзҰ»жңҖиҝ‘зҡ„пјҢжӯӨж—¶RealSense D435зҡ„ж·ұеәҰеҪұеғҸеҠҹиғҪе°ұжҙҫдёҠз”ЁеңәдәҶгҖӮдёҚиҝҮдәӢжғ…жңүиҝҷд№Ҳз®ҖеҚ•еҗ—пјҹ
гҖҢжқҺз»„й•ҝзңүеӨҙдёҖзҡұпјҢеҸ‘и§үжЎҲжғ…并дёҚеҚ•зәҜгҖҚпјҢд»Һеӣҫ5дёӯеҸҜзңӢеҮәжңүеҮ дёӘй—®йўҳпјҡ
- ж·ұеәҰж‘„еҪұжңәзҡ„и§ҶйҮҺз•ҘеӨ§дәҺеҪ©иүІж‘„еҪұжңәдёҖдәӣпјҢеҜјиҮҙе°Ҹи•ғиҢ„еңЁдәҢз»„еҪұеғҸдёӯзҡ„дҪҚзҪ®еҸҠе°әеҜёд№ҹз•ҘжңүдёҚеҗҢгҖӮ
- ж·ұеәҰеҪұеғҸ并дёҚжҳҜеҫҲе®Ңж•ҙпјҢжңүдәӣз ҙзўҺпјҢе°Өе…¶еңЁзү©д»¶иҫ№зјҳжӣҙжҳҜдёҘйҮҚпјҢз”ҡиҮіжңүйҳҙеҪұеҢә(ж·ұеәҰе‘ҲзҺ°й»‘иүІеҢәеҹҹ)ж— жі•и®Ўз®—еҮәж·ұеәҰй—®йўҳгҖӮ
- е°Ҹи•ғиҢ„иў«жЎҶеҲ°зҡ„еҢәеҹҹеғҸзҙ еҫҲеӨҡпјҢе°ұз®—еҜ№еә”еҲ°жӯЈзЎ®зҡ„дҪҚзҪ®пјҢж·ұеәҰиө„ж–ҷдёҚеҸӘдёҖ笔иҰҒд»ҘдҪ•иҖ…дёәдё»гҖӮ
- е°Ҹи•ғиҢ„жң¬иә«зӣҙеҫ„зәҰ10~20mmпјҢиҖҢD435иғҪзЁіе®ҡиЎЁиҫҫзҡ„ж·ұеәҰе·®еӨ§зәҰ5~10mm(и§ҶеӨ–еңЁе…үжәҗеҸҠж‘„еғҸе“ҒиҙЁиҖҢе®ҡ)пјҢжүҖд»ҘдёҚеҗҢж·ұеәҰжҲ–зӣёйӮ»е°Ҹи•ғиҢ„еҸҜиғҪеӯҳеңЁжһҒжҺҘиҝ‘з”ҡиҮізӣёеҗҢж·ұеәҰеҖјпјҢеҜјиҮҙеҗҢж—¶жңүж•°дёӘе°Ҹи•ғиҢ„дә§з”ҹзӣёеҗҢжҺЎж”¶йЎәеәҸгҖӮ
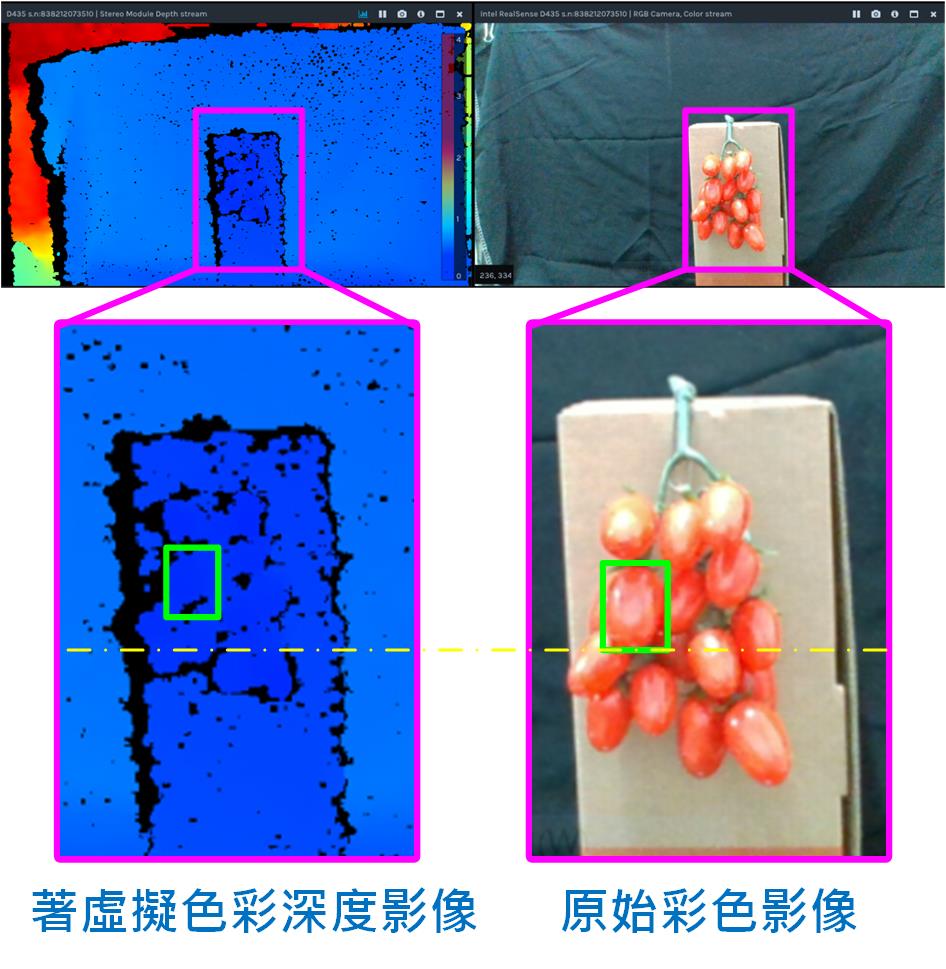
еӣҫ5 RealSense D435ж·ұеәҰеҪұеғҸдёҺеЎ¬е§ӢеҪ©иүІеҪұеғҸжҜ”еҜ№гҖӮ(OmniXRIж•ҙзҗҶиЈҪдҪң)
д»ҺдёҠиҝ°й—®йўҳеӨ§жҰӮеҸҜзҹҘиҰҒи®©жңәеҷЁжүӢиҮӮи§Ҷи§үзі»з»ҹзЁіе®ҡиҫЁиҜҶеҮәеҫ…жҠ“еҸ–зү©д»¶зҡ„и·қзҰ»зңҹзҡ„дёҚз®ҖеҚ•пјҢиҝҷ裡并дёҚз»ҷеҮәе”ҜдёҖи§Јжі•пјҢеҸӘжҳҜжҸҗдҫӣдёҖдәӣеҸҜиғҪзҡ„еҒҡжі•пјҢе…¶е®ғзҡ„з•ҷеҫ…жңүе…ҙи¶Јзҡ„жңӢеҸӢ继з»ӯз ”з©¶ж”№е–„пјҢд»ҘдёӢе°ұжҸҗдҫӣдёҖдәӣдёӘдәәи§ЈйўҳжҖқиҖғж–№еҗ‘гҖӮ
1.йҰ–е…ҲжҳҜи§ҶйҮҺй—®йўҳпјҢиӢҘиў«жЈҖеҮәзү©д»¶иҫғеӨ§(жҳҜжҢҮдҪ”з”»йқўжҜ”дҫӢиҖҢйқһе®һйҷ…еӨ–и§Ӯе°әеҜё)еҲҷеҸҜеҝҪз•ҘжӯӨдёҖй—®йўҳпјҢдҪҶеҫ…жЈҖзү©еғҸе°Ҹи•ғиҢ„е°әеҜёж—¶пјҢеҲҷеҸҜиғҪйңҖиҰҒдҪңз®ҖеҚ•и§ҶйҮҺж ЎжӯЈе·ҘдҪңпјҢд»Өж·ұеәҰеҪұеғҸж”ҫеӨ§гҖҒ平移дёҖдәӣд»Ҙз¬ҰеҗҲеҪ©иүІеҪұеғҸдҪҚзҪ®пјҢеҰӮжӯӨе°ұеҸҜеҸ–еҫ—иҫғжӯЈзЎ®ж·ұеәҰиө„и®ҜгҖӮ
2.еҶҚжқҘж·ұеәҰи§ЈжһҗеәҰдёҚи¶ій—®йўҳеҸҜиғҪдёҚжҳ“е…ӢжңҚпјҢиҝҷеұһдәҺзЎ¬дҪ“йҷҗеҲ¶пјҢдҪҶеҜ№дәҺжӣҙзЁіе®ҡжЈҖеҮәйғЁд»ҪеҲҷеҸҜд»Ҙдҫқе®һйҷ…зҺ°еңәзҠ¶еҶөеҫ®и°ғRealSense D435зҡ„LaserеҸ‘е°„еҠҹзҺҮгҖӮеҪ“ж‘„еҪұжңәеӨӘйқ иҝ‘еҫ…жөӢзү©ж—¶пјҢиӢҘLaserеҸ‘е°„еҠҹзҺҮеӨӘејәеҲҷдјҡйҖ жҲҗзәўеӨ–зәҝеҪұеғҸдёҚжҳҜжңүдёҖе Ҷз»Ҷе°Ҹе…үзӮ№пјҢиҖҢжҳҜдјҡеҸҳжҲҗдёҖзүҮжғЁзҷҪпјҢйӮЈдјҡйҖ жҲҗдёҚжҳ“и®Ўз®—жӯЈзЎ®и§Ҷе·®(ж·ұеәҰ)гҖӮ
3.е…ідәҺиҰҒд»ҘдҪ•зӮ№зҡ„ж·ұеәҰ(и·қзҰ»)еҒҡдёәжңәжў°иҮӮеҗ‘еүҚдјёзҡ„и·қзҰ»пјҢжңҖз®ҖеҚ•зҡ„жғіжі•е°ұжҳҜд»ҘжЎҶзҡ„дёӯеҝғзӮ№дҪңдёәеҹәжә–еҚіеҸҜпјҢдҪҶдёҚе№ёзҡ„жҳҜиҝҷдёӘзӮ№еҸҜиғҪжІЎжңүеҖјжҲ–иҖ…еҖјеҸ—еҲ°е№Іжү°иҖҢе’Ңе®һйҷ…жңүеҫҲеӨ§е·®и·қгҖӮеҰӮжһңе®№и®ёиҫғй•ҝзҡ„и®Ўз®—ж—¶й—ҙпјҢеҲҷеҸҜиҖғиҷ‘жҠҠжЎҶеҶ…жүҖжңүж·ұеәҰеҖјжҺ’еәҸеҗҺеҸ–дёӯдҪҚж•°жҲ–иҖ…д»Ҙй«ҳж–ҜеҲҶдҪҲ(дёӯй—ҙдјҳе…Ҳжқғи¶ҠйҮҚпјҢи¶ҠеҫҖеӨ–дҫ§жқғйҮҚи¶ҠдҪҺ)и®Ўз®—ж·ұеәҰеҖјеқҮеҖјгҖӮеҪ“然иӢҘиҖғйҮҸи®Ўз®—ж—¶й—ҙпјҢеҲҷеҸҜеңЁжЎҶдёӯеҝғеҸ–дёҖе°Ҹеқ—(еҰӮ10Г—10зӮ№)зӣҙжҺҘеҸ–е№іеқҮеҖјдәҰеҸҜгҖӮ
4.жңҖеҗҺжҳҜйҒҮеҲ°ж·ұеәҰзӣёеҗҢй—®йўҳж—¶пјҢеҲҷе»әи®®д»Һзү©д»¶жЎҶдёӯеҝғиҫғйқ еӨ–дҫ§гҖҒдёҠж–№зҡ„е°Ҹи•ғиҢ„ејҖе§ӢжҺЎж”¶пјҢеҰӮжӯӨиҫғдёҚдјҡеҸ‘з”ҹпјҢдёӢж–№е°Ҹи•ғиҢ„иў«е…¶е®ғжҢЎдҪҸпјҢжңәжў°зҲӘдёҚжҳ“иҝӣе…ҘеүӘеҲҮй—®йўҳгҖӮ
еҸӮиҖғж–ҮзҢ®
[1] Sweet Pepper Harvesting Robot (2018) https://youtu.be/DUgjFaYyecE
[2] жҺЎж”¶жңәеҷЁдәә_и§Ҷи§үзҜҮ http://omnixri.blogspot.com/2018/08/blog-post_28.html
[3] жҺЎж”¶жңәеҷЁдәә_еӨ№зҲӘзҜҮ http://omnixri.blogspot.com/2018/09/blog-post_28.html
[4] жҺЎж”¶жңәеҷЁдәә_жңәеҷЁжүӢиҮӮзҜҮ http://omnixri.blogspot.com/2018/10/blog-post.html
[5] 3Dж„ҹжөӢеҸҜиЎҢжҠҖжңҜдёҺејҖеҸ‘е·Ҙе…·еү–жһҗ https://omnixri.blogspot.com/2019/09/intel-realsense-dev-meetup13d.html
[6] Intel® RealSenseв„ў Depth Camera D400-Series https://software.intel.com/realsense/d400
[7] гҖҗ3Dж„ҹжөӢеҷЁгҖ‘Intel RealSenseв„ў SDKж— з—ӣе®үиЈ…жҢҮеј• https://omnixri.blogspot.com/2019/10/3dintel-realsense-sdk.html
[8] Sample Code for Intel® RealSenseв„ў cameras https://dev.intelrealsense.com/docs/code-samples
[9] гҖҗ3Dж„ҹжөӢеҷЁгҖ‘еҰӮдҪ•ж’·еҸ–Intel RealSenseв„ўдёІжөҒеҪұеғҸеҲ°OpenCV http://omnixri.blogspot.com/2019/11/3dintel-realsenseopencv.html
[10] гҖҗAI_ColumnгҖ‘еҰӮдҪ•д»ҘYOLOv3и®ӯз»ғиҮӘе·ұзҡ„иө„ж–ҷйӣҶв”Җд»Ҙе°Ҹи•ғиҢ„дёәдҫӢ https://makerpro.cc/2019/12/train-your-dataset-with-yolov3/
[11] Github YOLOv3дҫҰжөӢе°Ҹи•ғиҢ„еЎ¬е§ӢеҸҠз»“жһңеҪұеғҸжЎЈ https://github.com/OmniXRI/OpenVINO_RealSense_HarvestBot/tree/master/my_yolo3/Result
[12] Github realsense_object_distance_detection https://github.com/movidius/ncappzoo/tree/master/apps/realsense_object_distance_detection
[13] Github PINTO0309/MobileNet-SSD-RealSense https://github.com/PINTO0309/MobileNet-SSD-RealSense