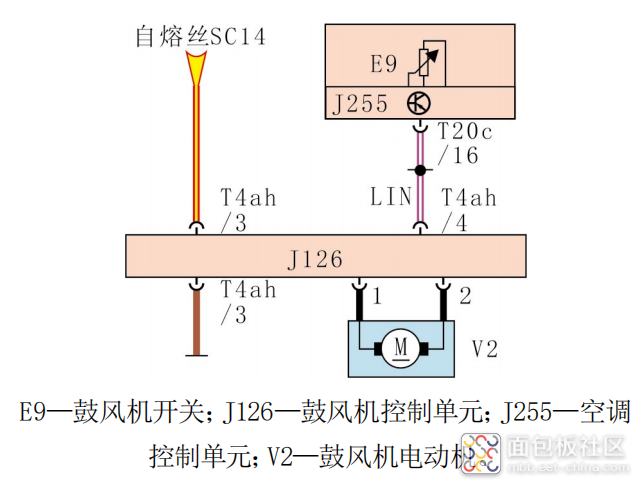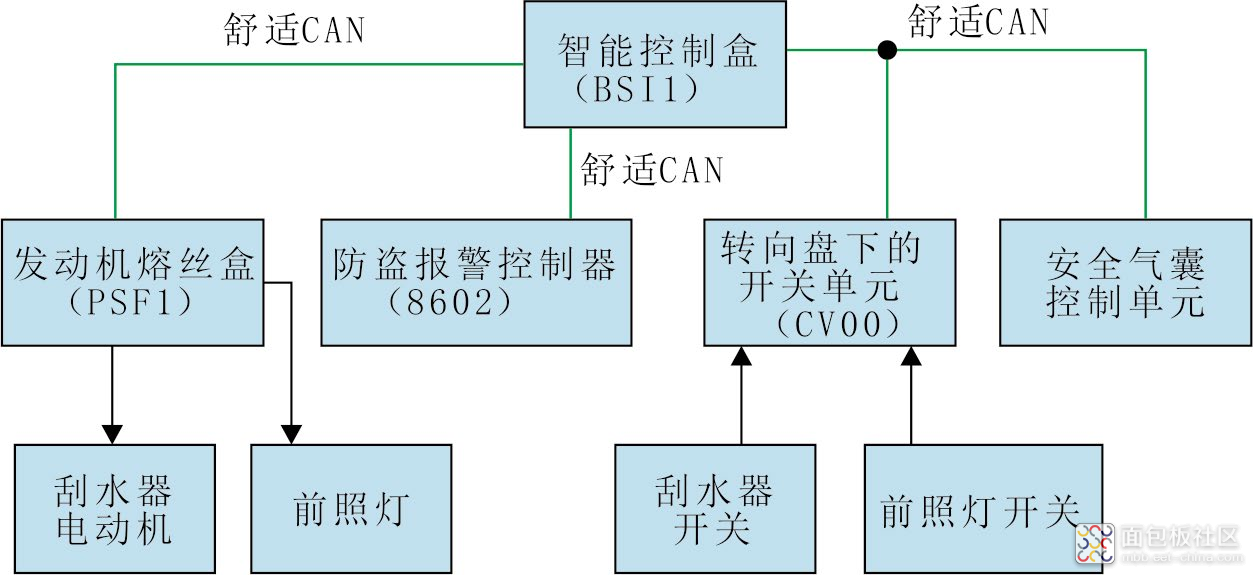
故障现象 一辆 2011款雪铁龙世嘉车,搭载1.6 L 发动机,累计行驶里程约为19.8万km。车主反映,该车刮水器偶尔会自动工作,且前照灯偶尔会自动点亮。 故障诊断 接车后试车发现,除了上述故障现象以外,当用遥控器解锁时,刮水器偶尔会工作几下。用故障检测仪检测,读得多个故障代码,但均与故障现象无明显关联;尝试读取智能控制盒( BSI1)和发动机室熔丝盒(PSF1)的数据流,发现诊断设备不支持;进入“带固定中央控制开关的多功能转向盘”系统,读取数据流,发现故障出现时,“雨刮开关按钮控制”显示为“未激活”,正常。 由图 1可知,转向盘下的开关单元(CV00)接收到刮水器开关(与CV400 集成一体)信号后,通过舒适CAN总线将其传递至PSF1,然后PSF1控制内部继电器吸合,为刮水器电动机供电,刮水器电动机开始工作。 图 1 刮水器电动机控制原理示意 经过反复测试发现,脱开 CV400导线连接器后,刮水器电动机会进入间歇工作模式。分析认为,这是正常现象,启用了安全行车应急工作模式。使用 虹科 P ico 汽车 示波器测量舒适 CAN H信号波形(图2),发现信号上偶尔会出现异常的高电位 。 图 2 异常的舒适CAN H信号波形 对信号进行译码(图 3),发现只要异常的高电位出现,对应的报文就存在错误,且出现错误的报文ID有多个。 图 3 对舒适CAN H信号进行译码 对比脱开 CV00导线连接器前后报文ID数量的变化,发现报文ID 094是由CV00发出的。筛选报文ID 094(图4),发现该报文偶尔异常(红色报文异常,黑色报文正常),且均是由异常的高电位引起的。 图 4 筛选报文ID 094 分析认为,由于 CV00通过舒适CAN总线发送的报文偶尔异常,导致PSF1无法接收刮水器开关及前照灯开关信号,为保证行车安全,PSF1控制刮水器电动机和前照灯进入应急工作模式。 那么舒适 CAN总线上异常的高电位是什么引起的呢?根据经验初步排除舒适CAN总线虚接、断路、短路的可能,推断CV00损坏或舒适CAN总线上的其他控制单元损坏。依次脱开舒适CAN总线上控制单元的导线连接器,当脱开发动机室右前照灯后方的防盗报警控制器(图5)导线连接器后,舒适CAN总线上异常的高电位未再出现,且故障现象也未再出现,由此推断防盗报警控制器损坏。 图 5 脱开防盗报警控制器导线连接器 故障排除 更换防盗报警控制器后试车,故障现象未再出现,故障排除。 故障总结 本案例是由于防盗报警控制器损坏,导致了 CAN总线上偶尔异常的高电位。这一错误带来了连锁反应,影响了转向盘下开关单元CV00的正常通信,致使车辆进入行车应急工作模式,导致了刮水机或前照灯的异常工作。 可见总线上各控制模块之间,存在着相互影响的关系,牵一发而动全身。这种协同关系通过万用表、诊断仪等设备是无法有效识别的。而通过示波器的串行译码功能,软件可以帮你自动识别异常的模块 ID,帮助技师更为快速、准确地识别故障! 案例作者: 杨增雨

 标签: 串行译码
标签: 串行译码