
CAN XL是第三代控制器局域网协议,建立在经典CAN和CAN FD网络的基础上,并支持向后兼容。它面向车载网络,使用单个差模总线连接多个控制器和传感器。由于高度的耐用性和对布线需求最小的总线拓扑结构,控制器局域网协议越来越多地进入新的工业应用。
CAN XL支持比其前代产品更高的数据比特率和更长的数据有效载荷,允许高达20Mbit/s的传输速率和高达每帧2048字节的传输速率。为了支持更高的数据传输速率,引入了一种新的CAN SIC XL收发器类型,用于提供高速数据传输所需的快速信号边沿、低振铃和对称性。
CAN XL仍可与混合模式总线上的典型CAN、高速CAN或CAN SIC收发器一起使用,或者如果应用不需要高比特率时也可一起使用。
更高的比特率和数据有效载荷能力使CAN XL能够弥合CAN FD和汽车以太网100BASE-T1之间的差距。CAN XL支持以太网隧道,旨在集成到TCP/IP网络系统中。
CAN XL的信号构成
CAN XL使用差分两线总线,由CAN高电平(H)和CAN低电平(L)信号组成。
实际信号的电压电平取决于总线拓扑结构和所使用的收发器类型(如:总线是仅由CAN XL 器件组成,还是将 CAN XL 与经典 CAN 和/或 CAN FD 器件混合使用)。
CAN XL帧由仲裁段、XL数据段和第二个仲裁段组成。

图1 CAN XL帧结构
在仲裁段,帧位以“标称”比特率传输,通常高达 500kbit/s。XL 数据段通常以至少几兆比特/秒的更高比特率传输,称为 XL 数据比特率。
有两种逻辑状态:逻辑0 和逻辑 1。在总线空闲和仲裁段,逻辑 0 由“显性”状态表示,而逻辑 1 由“隐性”状态表示。
当总线未驱动时,会进入隐性状态;当至少有一个节点驱动总线时,会进入显性状态。这提供了一种仲裁机制,允许来自一个节点的显性位覆盖另一个节点传输的隐性位,每个节点在发送时必须主动读取总线状态,如果总线状态与传输的状态不匹配,则立即停止传输。在这种情况下,另一个节点“赢得”了仲裁。
仲裁只能在仲裁段进行,并且在CAN XL数据段一次只能有一个节点在总线上传输。
总线在隐性状态下空闲,CAN H和CAN L信号都在2.5V左右。注意其差分电压等于或接近于0。在显性状态下,CAN H被驱动至5V,而CAN L被驱动至0V,从而产生正差分电压。
CAN XL波形测试与串行译码
测试工具:虹科Pico4425A示波器(EP014)

图2 CAN总线示波器(EP014)
测得的CAN XL波形如下图。接下来,我们将在配套的PicoScope 7 Automotive软件中进行串行译码。

图3 CAN XL波形数据
CAN XL 译码工具包含在虹科PicoScope 7 Automotive软件中。要在 PicoScope 7 Automotive软件中译码 CAN XL 波形,请从【更多】工具菜单里选择并启动【串行译码】话框。如下图

图4 选择【更多】中的【串行译码】
在软件支持的协议列表里,选择【CAN XL】,然后点【下一步】:

图5 选择【CAN XL】
为CAN XL数据信号选择相应的输入通道,例如下图的A通道。数据源可以是来自CAN XL TXD 的信号、差分总线的CAN H 或 CAN L。
CAN XL译码只需要一个差分通道。但是,如果需要,也可以通过捕获CAN H和CAN L并使用数学通道来计算差分信号电压,并进行译码。数学通道可以用作译码器的数据源。
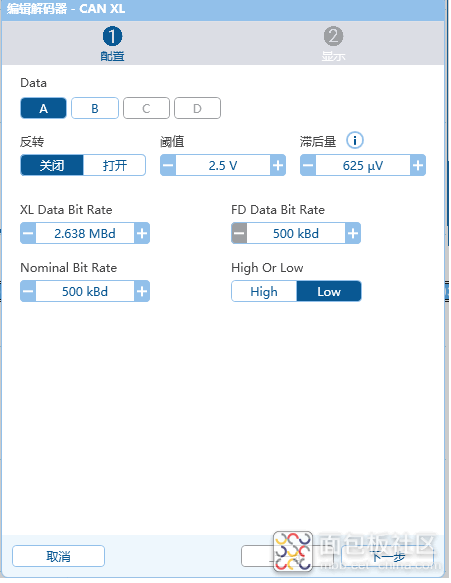
图6 配置CAN XL参数
一旦选择了数据的来源通道,接着根据所测的CAN XL总线的参数来设置以下选项:
(1)阈值
一般设置为信号电压水平的中间值为阈值,即CAN XL的差分电压在0至5V之间变化,我们设置为2.5V的阈值。
(2)XL Data Bit Rate (XL数据比特率)
XL数据段所使用的波特率
(3)FD Data Bit Rate (FD数据比特率)
比特率可切换(BRS=1)的CAN FD数据包,其数据段所用的波特率。
如果总线上没有节点发送CAN FD数据,这个选项可以被忽略。
(4)Nominal Bit Rate (标称比特率)
CAN XL数据包仲裁段所使用的波特率。
此设置也适用于总线上可能存在的任何经典CAN数据包和任何CAN FD数据包的仲裁段。
(5)Hing or Low (高或低)
所选择的数据来源是CAN高还是CAN低信号。
如果是对CAN TXD进行译码,请选择CAN Low
配置完所有选项后,单击【下一步】进入【显示】选项卡。在【显示】选项卡中,根据需要配置以下字段:
名称
设置译码器实例名称。PicoScope 会自动使用默认名称填充此名称,但你可以根据需要进行更新。
图形显示格式。
为原始的数据包选择一种在波形图上显示的数据格式。
表格显示格式
为原始的数据包选择一种在译码器输出表格里显示的数据格式。
表格内容
选择让表格只显示当前缓冲区里的数据,还是显示所有缓冲区里的数据。
时间标尺间解码
如果设置了时间标尺,译码器将仅解码两条时间标尺之间的数据。
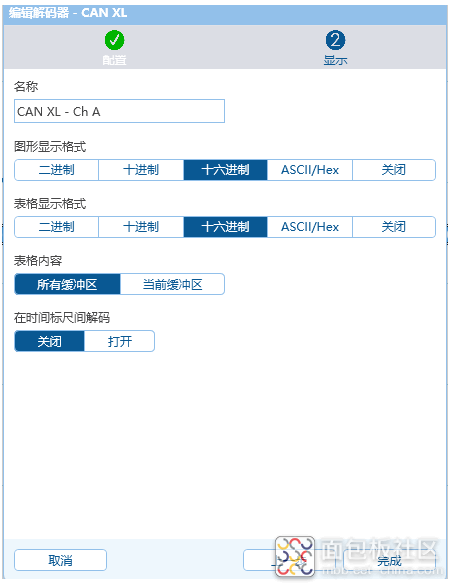
图7 配置显示字段
到此,你可点击上图的“完成”,完成所有设置,软件即开始译码。
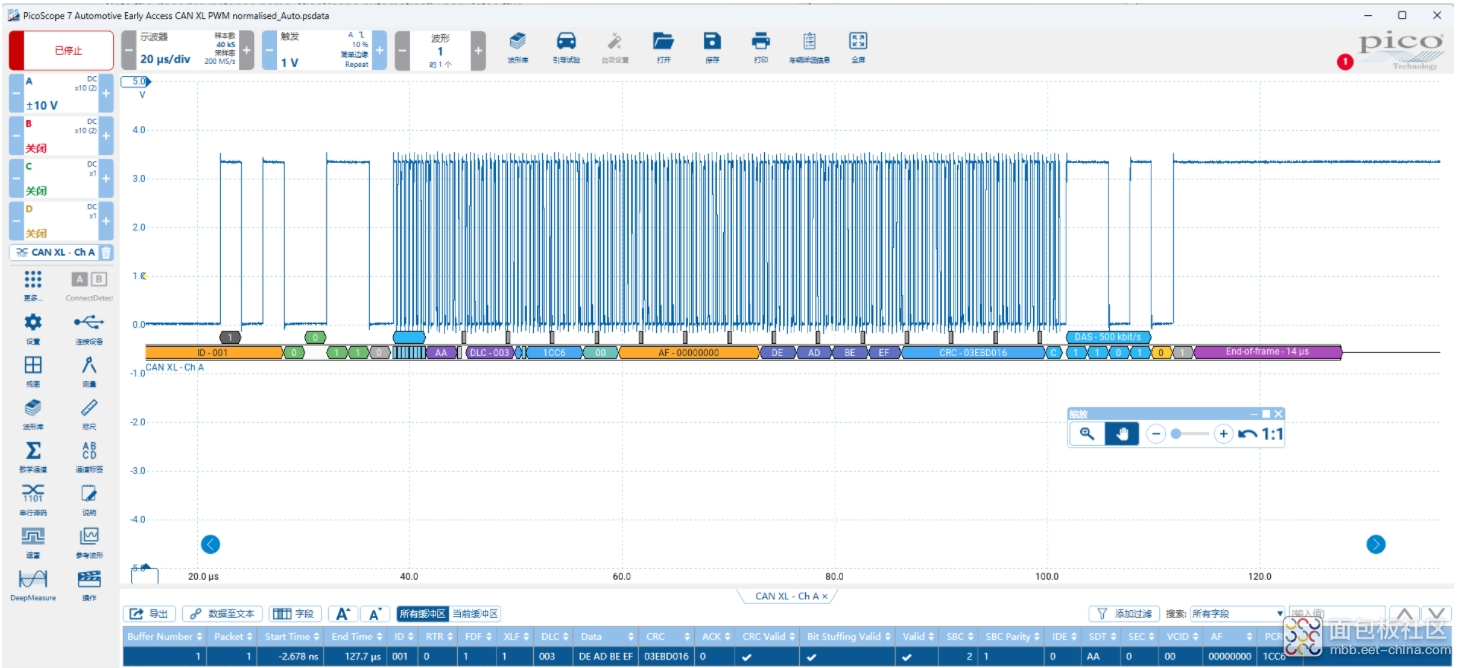
图8 CAN XL译码结果
如需波形源文件,可点此获取:
https://bbs.qichebo.com/forum.php?mod=viewthread&tid=71867&extra=page%3D1&_dsign=7495e943
作者: 虹科Pico汽车示波器, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-3989658.html
版权声明:本文为博主原创,未经本人允许,禁止转载!




 /3
/3 






文章评论(0条评论)
登录后参与讨论