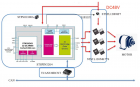
如何驱动无刷电机? 近些年,由于无刷直流电机大规模的研发和技术的逐渐成熟,已逐步成为工业用电机的发展主流。围绕降低生产成本和提高运行效率,各大厂商也提供不同型号的电机以满足不同驱动系统的需求。现阶段已经在纺织、冶金、印刷、自动化生产流水线、数控机床等工业生产方面应用。 无刷直流电机的优点与局限性 优点:高输出功率、小尺寸和重量、散热性好、效率高、运行速度范围宽、低电噪声、高可靠性和低维护要求、高动态响应、电磁干扰少。 局限性:无刷电机控制器昂贵、需要复杂的驱动电路、需要额外的位置传感器(FOC不用)。 无刷直流电机的驱动方法 无刷直机电机的驱动方式按不同类别可分多种驱动方式。 按驱动波形:方波驱动,这种驱动方式实现方便,易于实现电机无位置传感器控制; 正弦驱动:这种驱动方式可以改善电机运行效果,使输出力矩均匀,但实现过程相对复杂。这种方法又有SPWM和SVPWM(空间矢量PWM)两种方式,SVPWM的效果好于SPWM。 300W直流无刷电机驱动方案 使用STM32G431微控制器做为主控芯片,STSPIN32G4 高性能半桥门驱动器做为电机驱动。STSPIN32G4使用9x9mm VFQFPN封装,具有丰富可编程功能,可实现电流传感,每个功率MOSFET的漏源极电压传感,以及过流保护,是做电机完全集成控制的解决方案。 外部接口 板子使用标准的Arduino连接器接口,能够与扩展板(如MEMS传感器或蓝牙收发器)进行组合,CAN总线的配置允许与主或从模块进行互连,可以构建复杂的运动控制系统。板载ST-LINK/V2编程器方便进行固件的调试。 应用范围 方案支持配置为三分流或单分流,支持无传感器和基于传感器的控制算法。 可应用于工业和家庭自动化,家用电器,如吸尘器、烘干机和清洁机器人,伺服驱动和电动自行车,电动和园艺工具,泵与风机,无人机和航模。 技术参数 32位ARM Cortex -M4 MCU+FPU 时钟频率高达170MHz 用于三角函数的CORDIC数学硬件加速器 128kB Flash内存,专有代码读出保护 32kB SRAM内存与硬件奇偶校验 两个先进的定时器电机控制,16位,多达六个PWM通道 八个通用定时器 两个adc 12位分辨率(多达19个通道),转换速率为4Msps 4个12位DAC通道 全套接口(I(2)C, SPI, UART, CAN) 3.3V LDO线性稳压器,最高150mA 低静态线性稳压器的MCU电源在待机模式 具有全套保护功能的监控机制,热停机、短路和过载保护 75V额定栅极驱动器,1A接收器/源电流和嵌入式自举二极管 每个功率MOSFET的漏源极电压传感 输入母线电压从10V到75V,配有专用监控 功率级基于STL110N10F7功率MOSFET,输出电流高达20Arms(安装散热器),并保护过流条件 三分流或单分流配置电流传感 数字霍尔传感器和正交再编码输入 ST-LINK/V2编程器和调试器 Arduino UNO连接器 易于使用CAN总线 用于功率级温度监测的NTC传感器 参考设计资料 原理图: Gerber文件: BOM文件: 需要资料的可以私信小编哦。搜索 “华秋商城” 了解更多电子知识!

 标签: FOC
标签: FOC





