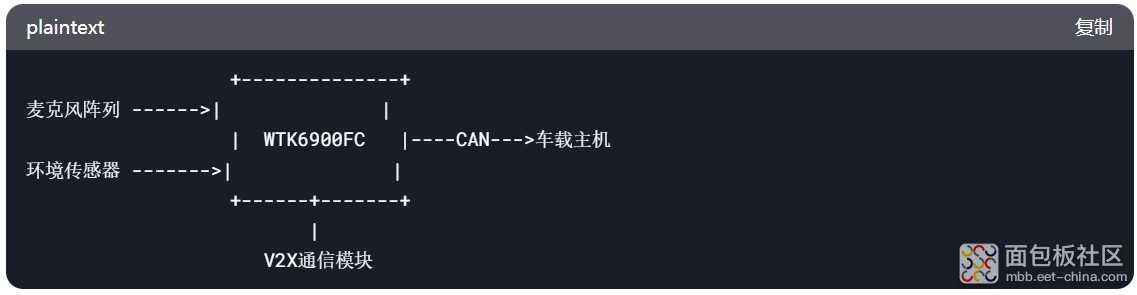
在智能硬件全面拥抱语音交互的时代, 广州唯创电子 WTK6900系列芯片凭借其独特的离线自学习能力,已成为智能家居、工业控制等领域的核心交互模块。本文针对实际应用中的高频问题,深度解析故障排除方法与优化策略。 一、学习模式全流程控制 1.1 智能入口机制 Q:如何精准触发学习模式? 系统采用 多级唤醒验证机制 ,需满足以下条件方可激活学习: 声纹匹配 :唤醒词需与系统预设声纹模板相似度>0.82 能量阈值 :语音信号幅值需超过环境噪声基线12dB以上 时序验证 :指令间隔需控制在0.3-1.2秒范围内 操作示范 : 在距离设备50cm处清晰说出"智能管家 → 学习唤醒词"(间隔0.5秒),此时设备将播放频率为2kHz的提示音,表示进入教学模式。 1.2 双通道退出策略 Q:如何安全终止学习进程? 系统提供 主动/被动双重退出保障 : 语音退出 :说出"退出学习"触发安全存储协议,已学习数据自动加密存入EEPROM 超时保护 :静默超时15秒自动退出,避免异常挂起 物理复位 :长按RESET键3秒强制退出(慎用,可能丢失未保存数据) 二、学习失败故障树分析 2.1 环境干扰排除 案例现象 :三次学习均提示失败 诊断路径 : 检查环境噪声谱:使用手机分贝仪测量,确保<45dB(A) 验证设备指向性:麦克风阵列的120°拾音锥角需对准用户 排查电磁干扰:远离变频器、无线基站等干扰源(建议距离>3米) 解决方案 : 执行 环境自校准协议 : python # 伪代码示例:环境噪声基线学习defnoise_calibration(): sample = audio_capture(duration=3)# 采集3秒环境音 vad_threshold = calculate_vad(sample)*1.3# 自动提升30%静音阈值 set_parameter (0x1A, vad_threshold)# 写入寄存器 2.2 语音参数优化 典型故障 :系统无响应或误识别 关键参数调整 : 参数项 标准值 可调范围 调节步长 最小语音时长 0.5s 0.3-1.0s 0.1s 最大语音时长 3.0s 2.0-5.0s 0.5s 端点检测阈值 -40dBov -45~-35 1dB 调优技巧 : 工业场景:延长最大时长至4s,提升抗噪等级至L3 儿童交互:缩短最小时长至0.4s,降低VAD阈值3dB 三、高级诊断与维护 3.1 声学特征可视化 通过UART输出调试信息(需启用开发者模式): AT+DEBUG=1 RECV: MFCC= , ENERGY=0.78 RECV: DTW_SCORE=0.85, THRESHOLD=0.75 MFCC值异常 :检查是否存在齿音失真(建议增加预加重系数) 能量值过低 :调整AGC增益参数(寄存器0x2B) 3.2 存储管理策略 芯片采用 分级存储架构 : 临时缓存区:存储未确认的学习数据(循环覆盖) 永久存储区:加密存储验证通过的特征模板 备份扇区:保留最近5次有效模板版本 维护建议 : 每月执行 AT+STORAGE_OPT=1 进行碎片整理 存储量达80%时自动触发LRU替换算法 四、场景化解决方案 4.1 工业环境应用 挑战 :冲压车间噪声达75dB 对策 : 启用定向波束成形: AT+BF_MODE=2 设置学习参数: shell AT+VAD_THRESH=35# 提高语音激活阈值 AT+NOISE_SUPP =4# 开启强降噪模式 AT+LEARN_RETRY =5# 增加学习重试次数 4.2 方言适配方案 现象 :粤语用户学习成功率低 优化步骤 : 下载方言语音包: AT+DL_DIALECT=3 调整声学模型: python set_phoneme_weight( )# 增强鼻音权重 扩展端点检测窗口: AT+EPD_WIN=300 通过掌握这些深度调试技巧,开发者可充分释放WTK6900系列的潜力。该芯片支持通过AT指令集配置200+个参数,配合频谱分析工具,能实现毫米级的语音特征微调。随着边缘计算能力的提升,离线语音交互正在从"能听会做"向"知意懂情"演进,而精准的问题诊断能力正是通往智能未来的钥匙。

 标签: 语音识别
标签: 语音识别