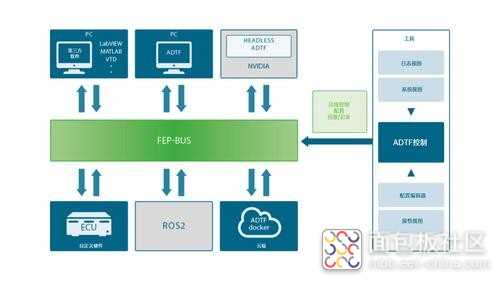
随着自动驾驶(AD)/高级驾驶辅助系统(ADAS)在车辆中的应用日益广泛,其引发的各类事件分析成为关键问题。本文聚焦 特斯拉Autopilot 的紧急制动情况,借助IVEX打造的 数据采集平台(Carvex) 及 安全分析平台(Safety Analytics platform) 展开研究。 通过对超过 15000公里 行程、 40TB 数据中 紧急制动事件 的剖析,发现Autopilot在面对超出操作设计域的场景时会解除自动驾驶,导致驾驶员紧急制动;同时还存在将正常情况 误判为风险 而紧急制动的现象,这些分析为深入了解AD/ADAS系统行为提供了参考。 一、引言 在过去几年里,AD/ ADAS组件在商用车和零售车辆中越来越受欢迎。这也带来了一系列亟待解决的复杂问题。比如一个备受关注的问题 :如何从数千小时的驾驶数据(包括开发阶段和实际路测)中识别并理解由 AD/ADAS 行为触发的各类事件,如紧急制动、急加速、低碰撞时间等。 数据采集平台Carvex 集成了一套尖端传感器阵列,搭载于特斯拉Model 3车型,主要用于采集驾驶数据以驱动产品开发。大部分数据是在Autopilot(特斯拉的L2 ADAS系统)被激活时收集的。由于 Autopilot 是先进的 ADAS 系统之一,我们特别关注其性能表现,尤其是 误触发紧急制动 (false positive braking)这一ADAS领域长期存在的技术痛点。 起初,我们在检查数据中的紧急制动事件时也遇到了困难。Carvex 已经收集了 15000 公里的驾驶数据。虽然与正常 ADAS 系统在部署前所需的测试里程相比,这个数字还很小, 但我们发现,如果没有良好的辅助工具,识别和检查紧急制动事件并非易事。 本文将解析特斯拉的紧急制动事件。 图1:Carvex数据收集平台 二、研究背景 Carvex 以Model 3为载体,集成包含RTK GNSS、激光雷达、毫米波雷达和多路相机的传感器套件(其中舱内相机用于监测Autopilot状态),所有数据由车载计算机实时记录。系统采用 全天候设计 ,确保恶劣天气下的数据采集完整性。 在数据收集过程中,Autopilot 大部分时间处于开启状态。Autopilot 主要由两个部分组成: 自适应巡航控制 和 车道保持辅助 。Autopilot 需要驾驶员主动监督,一旦遇到超出其操作设计域(ODD)的情况,系统会发出警报并解除自动驾驶。 目前Carvex累计行驶15,000公里,生成超过40TB数据,其中包含大量与Autopilot行为相关的关键事件。 通过IVEX安全分析平台 ,我们实现了: (1) 自动识别 驾驶日志中的 异常事件 (2) 关联事件潜在诱因 (3) 监测Autopilot行为模式变化 本次研究聚焦 减速度超过4.0 m/s² (13.12 ft/s²)的紧急制动事件,包括 Autopilot主动触发 或 系统退出后驾驶员介入 两种情况。这类事件的研究价值在于: (1)可能反映Autopilot超出ODD时的处置失效 (2)假阳性紧急制动可能导致追尾事故,存在安全隐患 三、Autopilot紧急制动解析 Carvex 的传感器数据会通过 开源自动驾驶软件阿波罗(Apollo) 的感知模块进行离线处理。处理后的图像等传感器数据以及 物体列表格式 的感知输出,随后会被导入到IVEX安全分析平台。 平台 能够展示 AD/ADAS 车辆的所有相机视频流。在这种情况下,我们选择重点关注 前置相机 和 舱内相机 的视频流,以便能够观察到其他车辆与Autopilot的行为。 平台支持 多驾驶日志联合检索 ,并按参数分类关键场景,可以通过"聚合视图"功能 筛选特定车速区间 内触发的紧急制动事件。 图2:安全分析平台紧紧急制动聚合视图 1、右侧车辆引发的紧急制动 图3:右侧车辆引发的紧急制动 图4:IVEX中的紧急制动 从图3和图4中可以看出,尽管 右侧卡车未实际侵入车道 ,自车仍以28 m/s(100.8 km/h)时速突发制动(右侧卡车时速75.6 km/h)。同时数据分析显示:当卡车 短暂压线1秒时 ,Autopilot判定其可能 低速切入 (此时车距仅1.59米),遂触发持续1秒的紧急制动,导致车速骤降7 m/s(根据RTK GNSS估算),这对两辆车来说都是一个危险的情况。 图5:仪表盘Autopilot行为记录 我们可以看到,车辆的 Autopilot 将卡车标记为 可能驶入本车车道 的潜在安全风险,这就是车辆决定紧急制动的原因。 2、交通信号灯前的紧急制动 图6:遇到交通信号时的紧急制动 图7:IVEX中的紧急制动 从图6和图7,分析可得车辆以20 m/s(72 km/h)接近路口时,驾驶员在黄灯亮起1.8秒后接管并急刹,3.7秒内完成静止(减速度5.4 m/s²)。值得注意的是,该版本的Autopilot虽能识别信号灯(如下图示),但无响应功能, 紧急制动纯属驾驶员行为 。 图8:仪表盘Autopilot行为记录 3、环岛入口的紧急制动 图9:在进入环形交叉路口之前进行的紧急制动 图10:IVEX中的紧急制动 在紧急制动发生前约 3 秒,车辆以18 m/s(64.8 km/h)接近环岛时突发制动。实测表明,Autopilot因环岛 超出其ODD 而 静默退出 ,驾驶员接管时剩余反应时间不足,导致 制动过急 。所幸后方无车,未造成风险。 4、技术结论 基于上述分析,我们对Autopilot 的行为得出一些结论: (1)ODD边界行为: 当场景超出Autopilot设计域时,系统会无预警退出,迫使驾驶员紧急干预; (2)风险预判机制: 对潜在切入障碍物存在过度敏感现象,可能触发非必要制动。 四、结语 在本篇文章中,我们介绍了如何使用 IVEX 安全分析平台分析特定场景类别 —— 意外紧急制动情况 。从案例中也可清晰了解到IVEX安全分析平台在AD/ADAS数据解析中的三大优势: (1)异常行为快速定位 (2)多维度场景重建 (3)系统决策溯因分析

 标签: 智能驾驶
标签: 智能驾驶