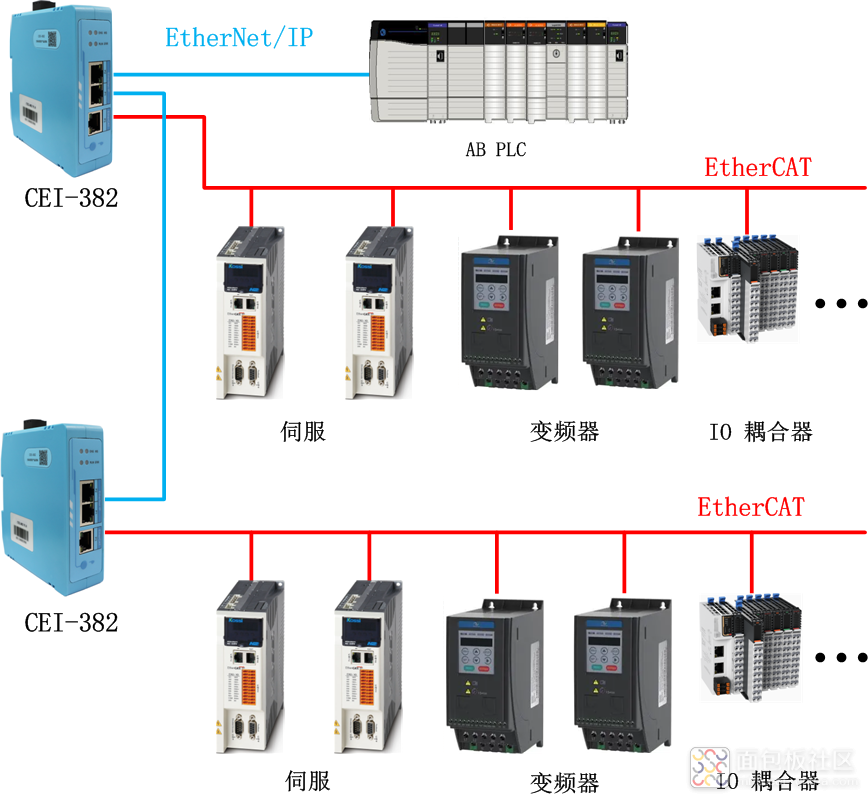
一、硬件设备说明: 罗克韦尔(AB)ControlLogix5555系列:PLC CPU 罗克韦尔(AB)1756-ENBT/A以太网模块:支持标准的EtherNet/IP协议 伺服型号:和利时DX50D-S2-040-E/220V/400W 支持EtherCAT协议 电机型号:和利时DXM-H060A-04030-2B2-A1/400W 上海泗博CEI-382网关:用于实现EtherCAT网络与EtherNet/IP网络之间高速、安全数据交换,即实现EtherCAT从站设备与EtherNet/IP主站设备之间通信 二、CEI-382产品特点: 双以太网口:EtherNet/IP端双网口,内置交换机功能,便于级联扩展。 支持DLR环网冗余:EtherNet/IP端支持Non-DLR,无缝融入DLR环网。 高实时性:3ms协议转换周期,确保高效实时通信。 支持热插拔:EtherCAT从站设备支持在线更换,即插即用,维护便捷。 隔离电源设计:增强抗干扰性能,确保稳定运行。 专业配置工具:ECATStart软件,支持ESI文件解析与离线配置,简化产品设置。 三、伺服硬件接线示意图: 四、AB PLC通过CEI-382对伺服电机进行EtherCAT通讯调试 1. 使用CEI-382连接和利时伺服,将网关ECAT口与伺服的ECAT接口的IN口连接。EtherNet/IP口与AB PLC处在一个局域网下; 通过配置软件ECATStart软件对CEI-382进行配置 和利时伺服ESI文件导入 导入成功后将伺服图标拖入总线中即可以进行配置 通过ECATStart映射参数实现对伺服pv 控制 概述:pv 控制模式下,电机依照目标速度、目标加减速度加速至指定速度。 控制流程: 设置 Mode of operation(6060h)为 pv 模式 设置 Profile acceleration(6083h)及 Profile deceleration(6084h) --可选 设置 Target velocity(60FFh),伺服使能 ON 状态,设置目标速度后会立即执行 伺服PDO映射中选择Control word 6040H与Target velocity 60FFH 对网关EtherNet/IP端的IP地址、设置周期时间、Vendcode、EtherNet/IP端数据显示等参数进行设置 按照上述配置完成后即可对网关进行下载 网关下载完成后会自动重启。 在AB PLC组态软件RSlogix5000中赋值实现电机按照指定速度转动 在和利时伺服的调试软件中可以看到AB PLC写过来的当前值以及当前伺服LED屏显示83run的状态即正常。 在AB PLC RSlogix5000中读取伺服反馈值



 标签: ethercat
标签: ethercat

