
如今,现场总线系统已成为实时分布式控制的一个组成部分,而这也是一个提高控制和监控生产过程安全性的有效方法。在开发项目前期,选择适合的通信技术十分重要,因为它决定了控制性能是否可以直接到达现场层,以及设备的可选范围。
虽然传统的现场总线系统(PROFIBUS、CANopen、DeviceNet、SERCOS等)或多或少也能够提供安全快速的数据传输,但它们在速度、整体生产力、可靠性和实时传输等特殊考虑因素方面不如EtherCAT技术。EtherCAT的出现有利于突破传统现场总线系统的瓶颈,因为它允许通过使用共享内存与应用程序直接交换数据,仅需使用标准网络适配器便能够满足需求,而无需额外的硬件。
EtherCAT:以太网控制自动化技术EtherCAT(Ethernet for Control Automation technology)是一种实现数据特定传输的硬实时技术。它可以提供实时性能,旨在通过双绞线或光纤电缆最大限度地利用高速全双工以太网数据传输,以满足工业过程控制需求。
基于以太网技术的EtherCAT具有易于实施、拥有成本和标准化等优点,使其成为工业应用上旨在最大限度提高控制系统性能的完美解决方案。该技术的媒体访问控制采用主/从原理,其中主站节点(通常是控制系统)将以太网帧发送到从站节点,从站节点动态地从这些帧中提取并插入数据。
EtherCAT技术工作原理从以太网的角度来看,EtherCAT部分可看作单个以太网设备,它接收和发送标准ISO/IEC802-3以太网帧。这个以太网设备可能由大量的EtherCAT从站设备组成,它们直接处理传入的帧并提取相关的用户数据,或者插入数据并将帧传输到下一个EtherCAT从站设备。网段内的最后一个EtherCAT从站设备将完整处理的帧发回,以便第一个从站设备作为响应帧返回给主站设备。
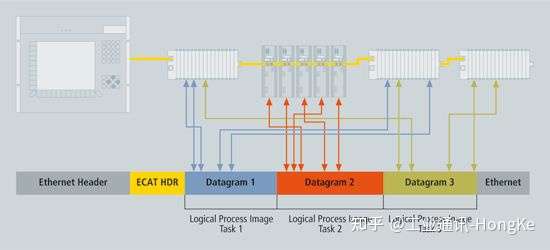
此过程利用以太网的全双工模式,允许双向独立通信,可以在主站设备和由一个或多个从站设备组成的EtherCAT网段之间建立无需切换的直接通信,这体现了EtherCAT操作原理的灵活性。
EtherCAT核心特性:
1. 灵活的拓扑结构
EtherCAT网络能够支持高达65,535个设备,且对其拓扑结构没有限制,可以采用线型、树型、星型等多种方式。
2. 高性能
由于EtherCAT协议的特定功能及其在拓扑结构、数字映射方面的灵活性,因此,这项高性能的技术可以极大地提高生产力,例如通过直接内存访问(DMA),数据能够以最少的CPU使用率传输,从站自己读写数据,且只有一个报文返回给主站处理,进而释放主站资源。
3. 低成本
EtherCAT是一种实时工业以太网技术,无需配置在主站、协处理器的特殊插件卡,也无需大量的处理能力,或大量处理能力的特殊插件卡,这项不依赖于集线器和交换机的标准以太网协议便是连接的唯一条件。
4. 易于集成
可以通过网关使用CAN、CANopen、EtherNET/IP等现场总线和工业以太网,或通过MailboxoverUDP、MailboxoverTCP第三方工具。
为了帮助项目开发者更快速地实现基于EtherCAT的解决方案,虹科推出了多种EtherCAT开发方案,其中包括提供网络设备与IPC系统交互功能的虹科KPA EtherCAT Master协议栈、可用于创建和修改EtherCAT网络配置的虹科KPA EtherCAT Studio等。
虹科KPA EtherCAT Master协议栈:帮你快速开发EtherCAT功能虹科KPA EtherCAT Master 协议栈确保了EtherCAT技术的所有优势:循环时间短、高性能、低成本等。其内核以ANSI“C”实现;因此,它可以很容易地移植到任何具有“C”编译器的平台。它甚至可以作为模块在Linux内核空间中运行(与C++实现相反,如果C++代码使用任何诸如虚函数、模板或异常等特性,则在加载内核模块时可能会遇到困难)。
虹科KPA EtherCAT Master采用模块化架构设计,可为不同的操作系统提供可移植性和可扩展性,并适应各种硬件平台。
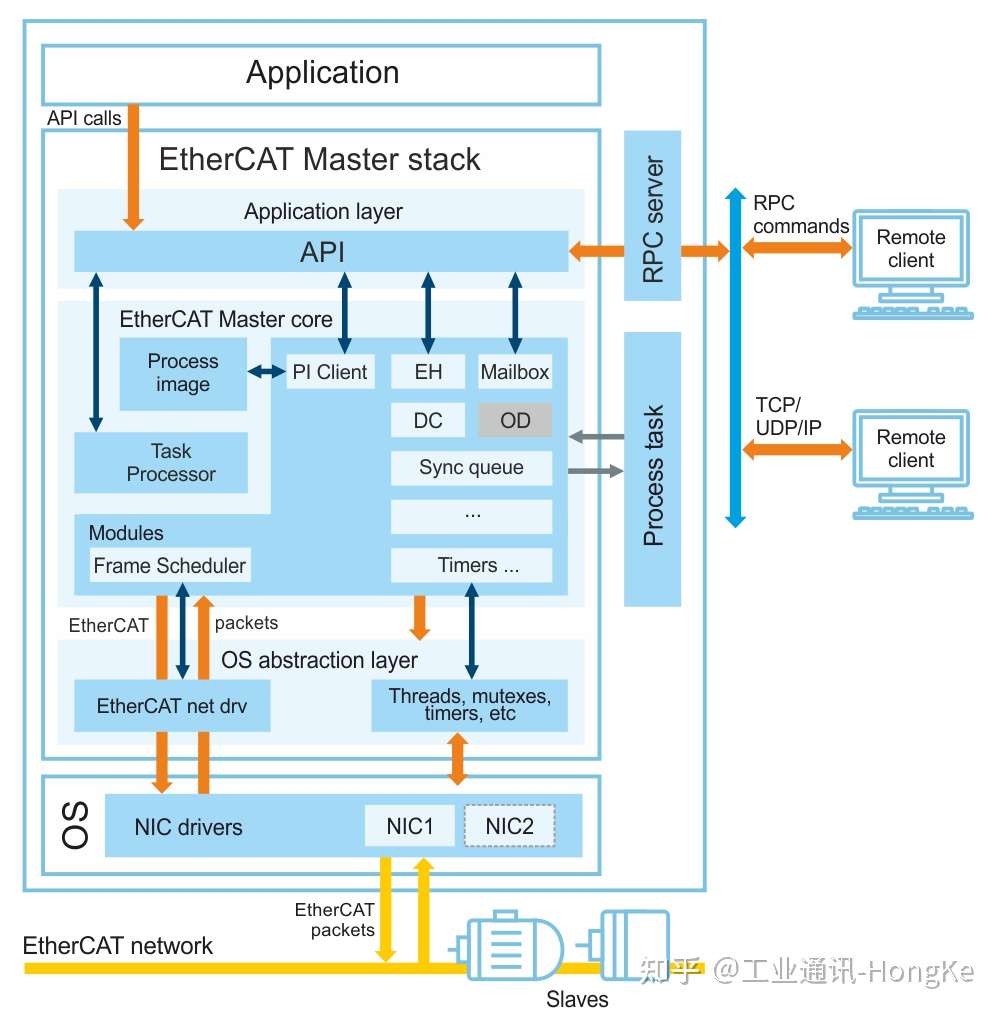 带捆绑模块的虹科KPA EtherCAT Master主站架构图
带捆绑模块的虹科KPA EtherCAT Master主站架构图应用程序
这是一个调用主 API 函数的单独进程。应用程序通过 API 对 Master 进行几乎完全的控制:启动/停止Master、进行配置、更新 PI 等。
API
允许配置和管理 EtherCAT 总线的用户应用程序编程接口 (API)
RPC服务器
RPC 服务器负责与远程客户端(例如,与 KPA EtherCAT Studio)建立连接并将请求转发到 EtherCAT主栈核心。它支持用户到用户和用户到内核模式(通过 IOCtl 调用)。
过程映像
过程映像由影子缓冲区(即直接向/从网络传输的数据)和活动缓冲区(即包含从/向 EtherCAT主站客户端接收/发送的数据的缓冲区)组成
处理任务(外部任务)
实现特定应用控制算法的回调函数。每次重复 PI 更新(高优先级)循环时都会调用此回调函数。
帧调度器
组装 EtherCAT 帧并根据其优先级将它们转发到 EtherCAT 网络驱动程序的模块。
EtherCAT 网络驱动程序
从底层网络实现中抽象出 EtherCAT 主栈核心模块。
线程、互斥体、定时器等
处理线程、定时器、互斥体的依赖于操作系统的函数的包装器。
NIC及其驱动程序
网络接口卡是一种物理设备,用于向/从 EtherCAT 网络发送/接收帧。
远程客户端
包括虹科KPA EtherCAT Studio和其他兼容程序
虹科KPA EtherCAT Master的主要功能包括通过 UDP 对智能从站进行集中参数化、特殊接口适配操作系统、用于与运行时或/和配置工具交互的 API、用于多个 TCP/IP 或/和 UDP 连接的服务器等。 结合现实应用的多种需求,虹科有4种可选版本:基础版、标准版、高级版、扩展包,它们能够满足用户不同层次的需求。
若想了解更多关于虹科EtherCAT开发方案和技术服务的信息,欢迎随时通过邮箱hongconsys@hkaco.com与我们交流。
作者: 虹科工业智能互联, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-3988237.html
版权声明:本文为博主原创,未经本人允许,禁止转载!




 /3
/3 






文章评论(0条评论)
登录后参与讨论