
Balloon actuators and liquid-metal sensors enable tactile human-insect interactions
EVAN ACKERMAN 24 NOV 2022 IEEE Spectrum

All things considered, we humans are kind of big, which is very limiting in how we can comfortably interact with the world. The practical effect of this is that we tend to prioritize things that we can see and touch and otherwise directly experience, even if those things are only a small part of the world in which we live. A recent study conservatively estimates that there are 2.5 million ants for every one human on Earth. And that’s just ants. There are probably something like 7 million different species of terrestrial insects, and humans have only even noticed like 10 percent of them. The result of this disconnect is that when (for example) insect populations around the world start to crater, it takes us much longer to first notice, care, and act.
To give the small scale the attention that it deserves, we need a way of interacting with it. In a paper recently published in Scientific Reports, roboticists from Ritsumeikan University, in Japan, demonstrate a haptic teleoperation system that connects a human hand on one end with microfingers on the other, letting the user feel what it’s like to give a pill bug a tummy rub.
Three images showing a top view of the microfinger, which is clear with with liquid metal channels running through it, and side views of the microfinger straight and bent. At top, a microfinger showing the pneumatic balloon actuator (PBA) and liquid-metal strain gauge. At bottom left, when the PBA is deflated, the microfinger is straight. At bottom right, inflating the PBA causes the finger to bend downward.
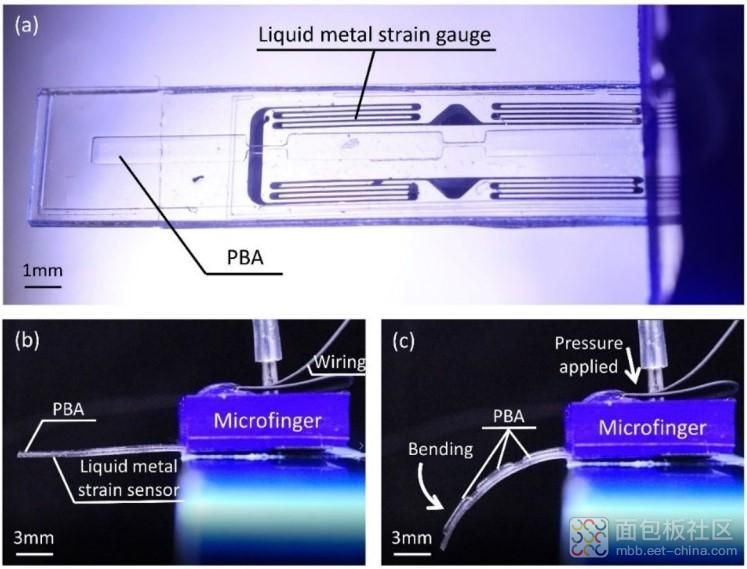
These microfingers are just 12 millimeters long, 3 mm wide, and 490 micrometers (μm) thick. Inside of each microfinger is a pneumatic balloon actuator, which is just a hollow channel that can be pressurized with air. Because the channel is on the top of the microfinger, when the channel is inflated, it bulges upward, causing the microfinger to bend down. When pressure is reduced, the microfinger returns to its original position. Separate channels in the microfinger are filled with liquid metal, and as the microfinger bends, the channels elongate, thinning out the metal. By measuring the resistance of the metal, you can tell how much the finger is being bent. This combination of actuation and force sensing means that a human-size haptic system can be used as a force feedback interface: As you move your fingers, the microfingers will move, and forces can be transmitted back to you, allowing you to feel what the microfingers feel.
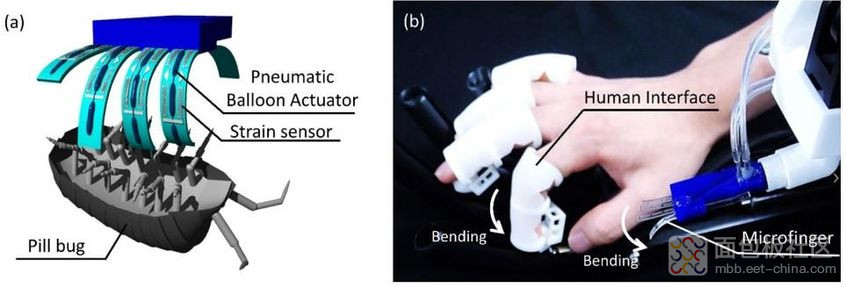
Two images showing a concept drawing of the microfingers interacting with a pill bug, and a human hand enclosed in sensors and actuators.The microfingers [left] can be connected to a haptic feedback-and-control system for use by a human.
Fans of the golden age of science fiction will recognize this system as a version of Waldo F. Jones’s Synchronous Reduplicating Pantograph, although the concept has even deeper roots in sci-fi:
The thought suddenly struck me: I can make micro hands for my little hands. I can make the same gloves for them as I did for my living hands, use the same system to connect them to the handles ten times smaller than my micro arms, and then...I will have real micro arms, they will chop my movements two hundred times. With these hands I will burst into such a smallness of life that they have only seen, but where no one else has disposed of their own hands. And I got to work.
With their very real and not science fiction system, the researchers were able to successfully determine that pill bugs can exert about 10 micronewtons of force through their legs, which is about the same as what has been estimated using other techniques. This is just a proof-of-concept study, but I’m excited about the potential here, because there is still so much of the world that humans haven’t yet been able to really touch. And besides just insect-scale tickling, there’s a broader practical context here around the development of insect-scale robots. Insects have had insect-scale sensing and mobility and whatnot pretty well figured out for a long time now, and if we’re going to make robots that can do insectlike things, we’re going to do it by learning as much as we can directly from insects themselves.
“With our strain-sensing microfinger, we were able to directly measure the pushing motion and force of the legs and torso of a pill bug—something that has been impossible to achieve previously. We anticipate that our results will lead to further technological development for microfinger-insect interactions, leading to human-environment interactions at much smaller scales.”
—Satoshi Konishi, Ritsumeikan University
I should also be clear that despite the headline, I don’t know if it’s actually possible to tickle a bug. A Google search for “are insects ticklish” turns up one single result, from someone asking this question on the “StonerThoughts” subreddit. There is some suggestion that tickling, or more specifically the kind of tickling that is surprising and can lead to laughter called gargalesis, has evolved in social mammals to promote bonding. The other kind of tickling is called knismesis, which is more of an unpleasant sensation that causes irritation or distress. You know, like the feeling of a bug crawling on you. It seems plausible (to me, anyway) that bugs may experience some kind of knismesis—but I think that someone needs to get in there and do some science, especially now that we have the tools to make it happen.
气球驱动器和液态金属传感器使人与昆虫的触觉相互
作用成为可能

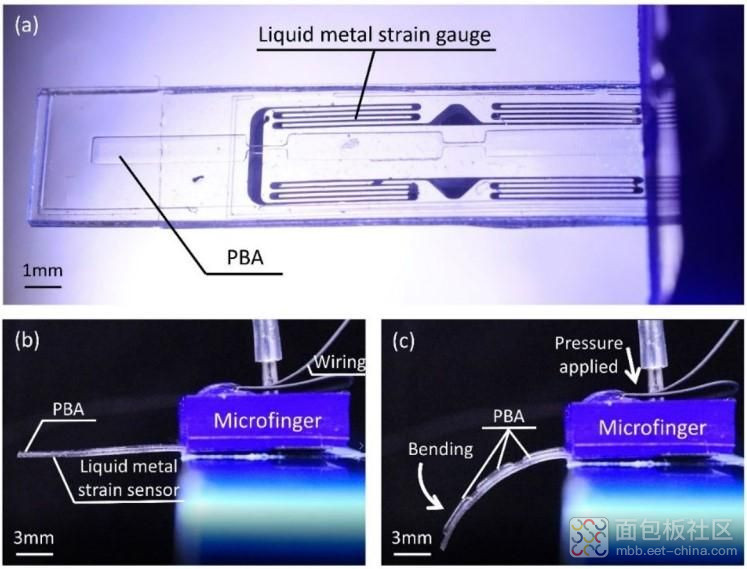
在顶部,一个显示气动气球致动器(PBA)和液态金属应变计的微型指针。在左下角,当PBA放气时,微指是直的。在右下角,给PBA充气会导致手指向下弯曲。
这些微纤丝只有12毫米长,3毫米宽,490微米(μm)厚。在每一个微型指头内都有一个气动气球执行器,它只是一个可以用空气加压的空心通道。因为通道在微指的顶部,当通道膨胀时,它会向上膨胀,导致微指针向下弯曲。当压力降低时,微针会回到原来的位置。在微纤丝机中,单独的通道被液态金属填充,当微纤丝弯曲时,这些通道就会拉长,使金属变薄。通过测量金属的电阻,你可以知道手指弯曲了多少。这种驱动和力感测的结合意味着一个人类大小的触觉系统可以用作力反馈接口:当你移动手指时,微纤丝会移动,力可以传回给你,让你感受到微纤丝的感受。
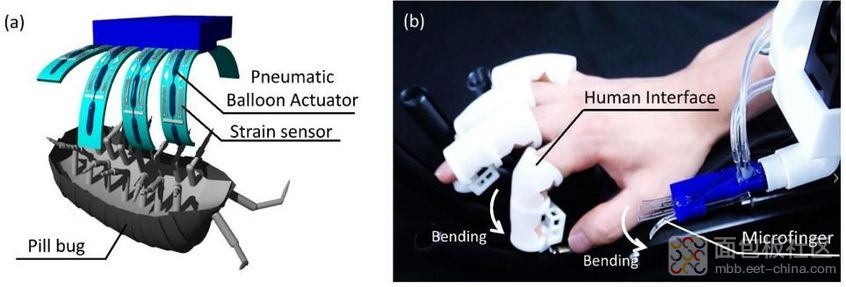
微纤丝[左]可以连接到触觉反馈和控制系统,供人类使用。
我突然想到:我可以为我的小手做微型手。我可以为它们做和我的手一样的手套,用同样的系统把它们连接到比我的微型手臂小十倍的把手上,然后……我就会有真正的微型手臂,它们会砍掉我的动作200次。有了这双手,我将迸发出一种他们只看到过的渺小的生命,而在那里没有其他人处置过自己的双手。我要工作了。
通过他们非常真实而非科幻小说的系统,研究人员成功地确定了药虫可以通过腿施加大约10微米的力,这与使用其他技术估计的结果大致相同。这只是一个概念验证研究,但我对这里的潜力感到兴奋,因为世界上还有很多地方人类还没有真正接触到。除了昆虫的鳞片挠痒痒,还有一个更广泛的实际背景,围绕昆虫鳞片机器人的发展。昆虫已经有了昆虫的感知能力和机动性,以及其他一些在很长一段时间内都没有很好解决的问题,如果我们要制造出能做类似昆虫的机器人,我们就要尽可能多地直接从昆虫身上学习。
“利用我们的应变传感微型传感器,我们能够直接测量出药虫腿部和躯干的推动运动和力,这是以前不可能实现的。我们预计,我们的研究结果将进一步推动微探针与昆虫相互作用的技术发展,从而实现人类与环境的相互作用小得多的规模。”
-佐藤信孝(Satoshi Konishi),立命馆大学(Ritsumeikan University)


 /5
/5 






文章评论(0条评论)
登录后参与讨论