
CAN的识别码计算与数字隔离器AduM1201的CAN总线连接
[CAN的识别码计算]
[说明]
1. 我们使用 MCP2510/2515 作为 CAN CONTROLLER 使用, 因此文中提及的 CAN 识别码的计算, 应指与 2515 的相应ID register 的设定.
2. 之所以将这个不特别的问题, 在这里再次提出的原因是, 我们又怀着好奇的心理, 对另一款 CAN CONTROLLER, 即 SJA1000 的 ID register 进行了简单的熟悉. 那么与 MCP2515 的比较, 就变得明显而自然.
[SJA1000 的4个 Relative ID Registers]
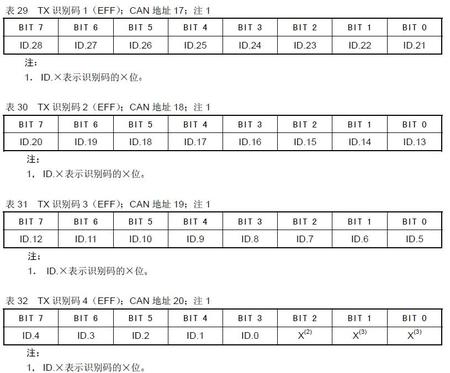
我们以 D1, D2, D3, D4 称呼 SJA 的 4个 ID Register, 对于标准帧和扩展帧, 分别列表(From SJA datasheet):
Standard frame:
应对应 D1 D2
Sample: 如设定 0x01 0x00, 故应计算得 ID = 8
修改为 0x01 0x20, 应计算得 ID = 8 + 1 = 9
Extend Frame:
对应 D1 D2 D3 D4,
Sample: 如设定 0x01 0x00 0x00 0x00, 故应计算得 ID = 0x200000
修改为 0x01 0x20 0x00 0x00, 计算得到 ID = 0x240000
修改为 0x01 0x20 0x80 0x00, 计算得到 ID = 0x240000 + 0x1000 = 0x241000
修改为 0x01 0x20 0x80 0x10, 计算得到 ID = 0x241000 + 0x2 = 0x241002
[MCP2510/2515 的4个 Relative ID Registers]
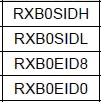
我们能够用简单用 SIDH SIDL EIDH EIDL 来称呼可能在 TX/RX Register 中出现的这4个相关 Register, 更直观的例子是下表(From MCP2515 datasheet):
明显的, MCP2515 有着自有的 ID 定义(也应该注意的是, 在这4个 Registers 中, 往往不仅仅只定义了ID, 而且包括扩展帧 Ext 标识位, 或者远程帧 RTR 标识位).
我们用下列代码进行理解 Reference: http://wenku.baidu.com/view/50f17ea6f524ccbff12184ec.html)
Reference: http://wenku.baidu.com/view/50f17ea6f524ccbff12184ec.html)
EID17:EID16)EID17:EID16))<<16EID17:EID16))EID15:EID8)(EID7:EID0))
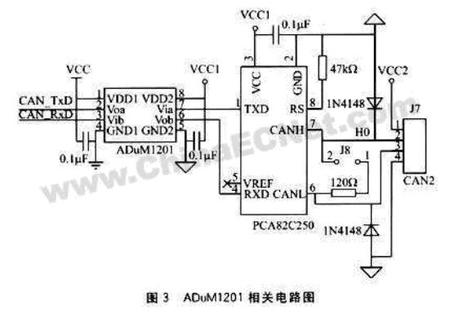
我们阅读了 1201 的文档, 直觉该电路图可疑, 方向怀疑颠倒(TX 和 RX 都颠倒). 该电路图中 ADuM1201AR 用于, 隔离 CAN CONTROLLER(如 MCP2510/2515), 以及 CAN DRIVER(如 PCA82C250).
为了确认我们的怀疑, 我们进入 ADuM1201 的 ADI 公司官方网页( http://www.analog.com/zh/interface-isolation/digital-isolators/adum1201/products/product.html ),
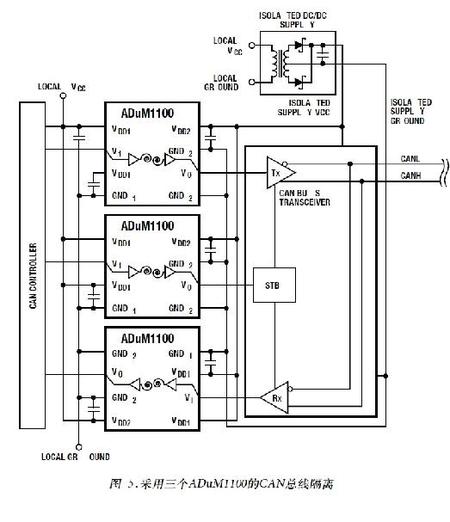
尽管在 datasheet 与 应用手册中, 都没有 1201 直接用于 CAN 总线隔离的实际例子, 我们仍然可以从 AN-770 application note pdf( Download from this webpage ), 找到两个1100 单独隔离的例子:
在该例子的比较下, 我们确认上述网络资源中的 1201 的电路图的连接错误, 图例中, 1201 的 PIN6, PIN7 应该交换(TX, RX 交换), 同理, 另一端连接 CONTROLL 的 PIN2与PIN3 应交换(RXCAN 与 TXCAN) 交换.
[补记]
在选用 MCP2510 与 MCP2515 的问题上, 常常给人带来迷思. 网络上曾经出现的大量资源, 都是 08 年左右的驱动 2510 的文章, 这让我们情不自禁选择了 MCP2510 的样品... 当然, 最后我们不得不换用 MCP2515 的过程, 产生了完全不必要的工程浪费.
原因完全在于我们没有仔细比较两个 datasheet, 让我们简单看看吧:
[SPI of 2510 (From MCP2510 datasheet)]
[SPI of 2515 (From MCP2515 datasheet)]
在 3.3v 的工作电压, 以及更高工作温度的压力下, SPI of 2510 的通讯速度表现为 2.5MHz. 但是, 在阅读了网络大量的使用心得后, 两份不同的资料, 指明 2510 可能只能达到的最高速度为 1M 左右, 有人说是 1.3MHz, 有人说是 <1MHz.
当我们茫然地面对已经确认不可更改的 5.4MHz SPI 系统总线时(LCD屏显示需要较高速度), 我们不得不苦笑着用烙铁一根一根取下蜘网般的飞线, 并谨慎再次换上 2515 新样品(已经不想说买新样品和取货浪费的时间)``` 抬头看着窗外的斜阳, 我们的心情如同元旦期间出现在深圳的寒流般冷冰冰... 这是对一个工程师不勤于思考比较, 不作基础准备工作的惩罚咩?
Allen 作于深圳福田
发表于 <电子工程专辑>




 /4
/4 









用户1602177 2013-1-6 15:48
allen_zhan_752827529 2013-1-5 18:21