
调研显示,多数CAN接口开发问题源于对协议、硬件、错误处理等核心环节的忽视。本文提炼出五大必修要点:协议深度理解、硬件规范配置、错误预防机制、实时性设计与调试流程优化,助你规避80%的常见陷阱,事半功倍。
在Air780EPM上开发CAN接口,需要注意哪些问题?
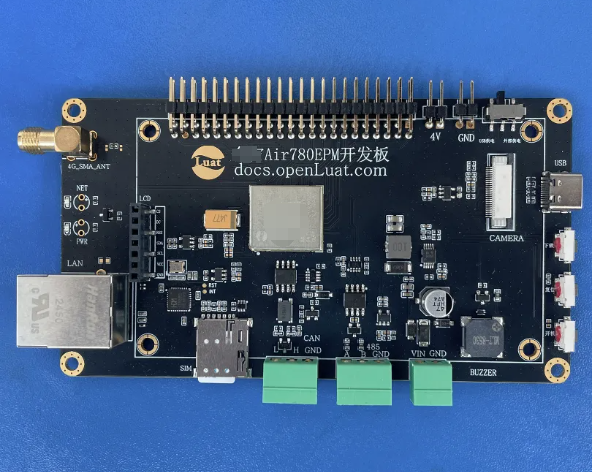
本文将分享CAN接口硬件参考设计,以及相关软件开发示例、问题排查要点等内容。
资料中心文档库也在持续更新中,有需要的朋友可以查阅最新资料。
CAN接口硬件设计详见:https://docs.openluat.com/air780epm/luatos/hardware/design/can/
LuatOS开发API文档详见:https://docs.openluat.com/air780epm/luatos/api/core/can/
我们从以下五个方面,一起来了解在Air780EPM上开发CAN接口的相关要点:
CAN接口概述
硬件设计注意事项
软件开发注意事项
应用场景与参考设计
典型问题排查
大家在实际应用中,可结合项目场景灵活选择合适方案。
CAN(Controller Area Network)是一种被广泛应用于汽车和工业控制领域的串行通信协议。它支持多主节点通信,具有高可靠性、实时性以及错误检测能力。
Air780EPM支持CAN 2.0A/B标准,允许最高1Mbps的通信速率。
1)支持协议:
CAN 2.0A/B标准,兼容标准帧(11 位ID)和扩展帧(29 位ID)。
注意!Air780EPM不支持CAN FD标准。
2)通信速率:
最高支持1Mbps(如需更高带宽需外接CAN FD收发器)。
3)物理层依赖:
需外接CAN收发器(如川土微的CA-IF1051S/VS),通过GPIO引脚复用实现差分信号传输(CAN_H/CAN_L)。
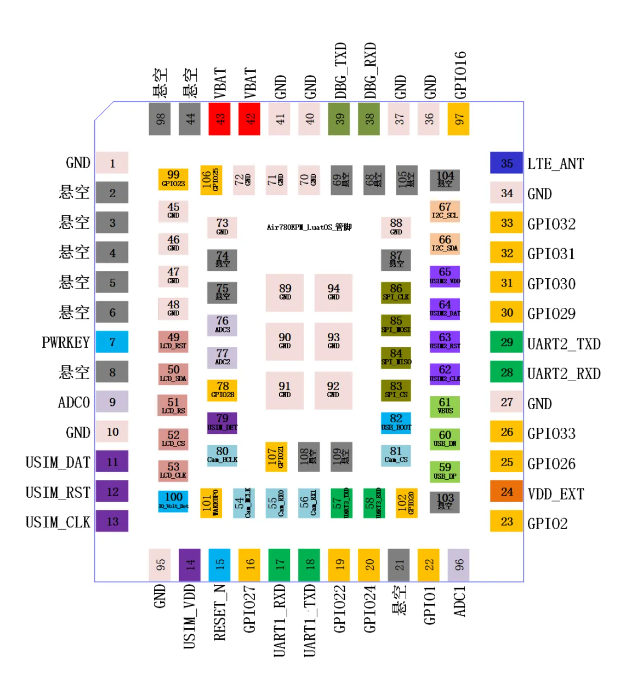
1)GPIO映射:
CAN_TXD(发送):默认映射到GPIO26(GPIO13是另一组映射选择)。
CAN_RXD(接收):默认映射到GPIO25(GPIO12是另一组映射选择)。
CAN_STB(待机模式控制):默认映射到GPIO28(GPIO14是另一组映射选择)。
1)低功耗模式:
当系统需要进入节能状态时(如汽车熄火或设备待机),CAN_STB信号可被触发(高电平或低电平,取决于硬件设计),使CAN收发器进入低功耗待机模式。此时,收发器停止正常通信以降低能耗。
2)唤醒功能:
当需要恢复通信时,CAN_STB信号状态切换(如拉低或拉高),将收发器从待机模式唤醒,重新激活CAN总线的数据传输。
1)收发器启用/禁用:
在某些CAN收发器芯片(如TI的SN65HVD230)中,STB(Standby)引脚直接控制收发器的工作状态。
例如:
STB = 高电平:收发器关闭,仅消耗微量静态电流。
STB = 低电平:收发器正常工作,可收发CAN信号。
2)系统集成:
在复杂系统中,CAN_STB可能由主控制器(如MCU)输出,协调多个CAN节点的电源状态,优化整体能耗。
注意!Air780EPM开发板,为了电平转换的需要,在Air780EPM侧,CAN_STB信号,实际需要作如下反向设计:
1)STB = 低电平:收发器关闭,仅消耗微量静态电流。
2)STB = 高电平:收发器正常工作,可收发CAN信号。
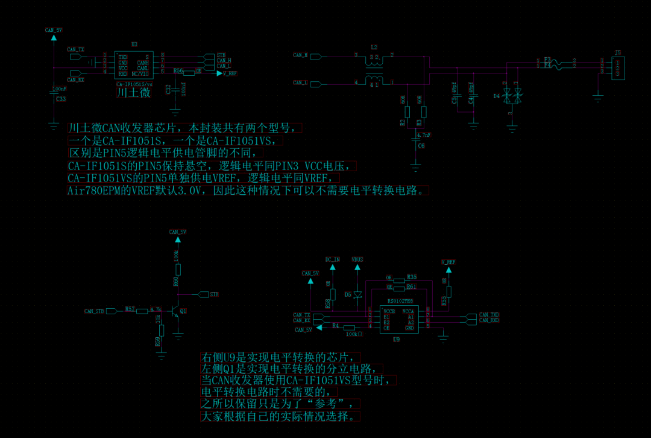
CAN收发器逻辑电平需与Air780EPM的GPIO电平匹配(默认 3.0V);CA-IF1051VS:支持IO逻辑电平独立供电。
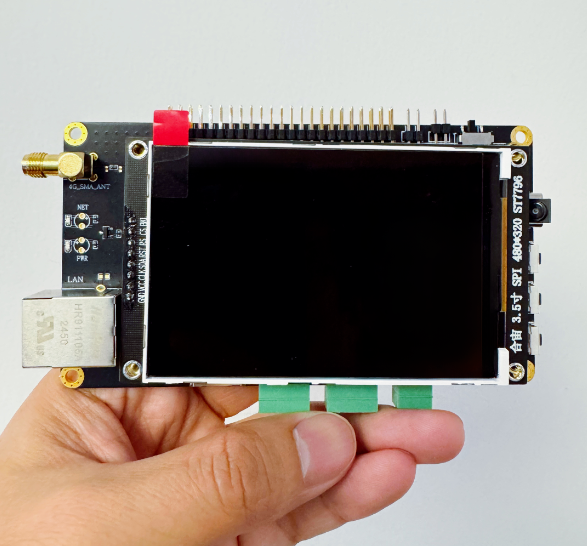
Air780EPM开发板为例:
可使用Air780EPM的PIN99:Vref(GPIO23保持高电平输出)与其连接,从而保证CA-IF1051VS与Air780EPM的IO电平一致,不再需要额外的电平转换电路。
1)CAN收发器选型:
推荐使用川土微CA-IF1051S/VS,支持3.0V逻辑电平,抗干扰能力强。
确保收发器与Air780EPM的GPIO电平匹配(如VREF=3.0V)。
2)终端电阻:
必加:在CAN总线两端各接入120Ω终端电阻,防止信号反射。
位置:靠近CAN收发器的CAN_H和CAN_L引脚。
3)布线与抗干扰:
差分对走线:CAN_H和CAN_L需走差分线,长度对称,间距10-15mil。
远离干扰源:避免靠近电源线、高频信号线,增加地线屏蔽。
ESD防护:在CAN接口处添加TVS二极管(如PESD3V3YB4),靠近接口布局。
1)电源稳定性:
CAN收发器需独立供电,通常为5V,但需注意您所选择的CAN收发器型号是否需要通过电平转换与Air780EPM的3.0V IO电平一致。
比如:CA-IF1051S需要增加电平转换电路,而CA-IF1051VS有IO电平独立供电,无需再加电平转换电路。
2)使用去耦电容(如100nF和10μF)稳定电源。
1)总线长度:
50米内:1Mbps速率下可正常通信。
超长距离:需降速至125kbps或添加中继器。
2)GPIO冲突:
确保CAN_TXD/CAN_RXD/CAN_STB引脚,初始化为CAN接口功能。
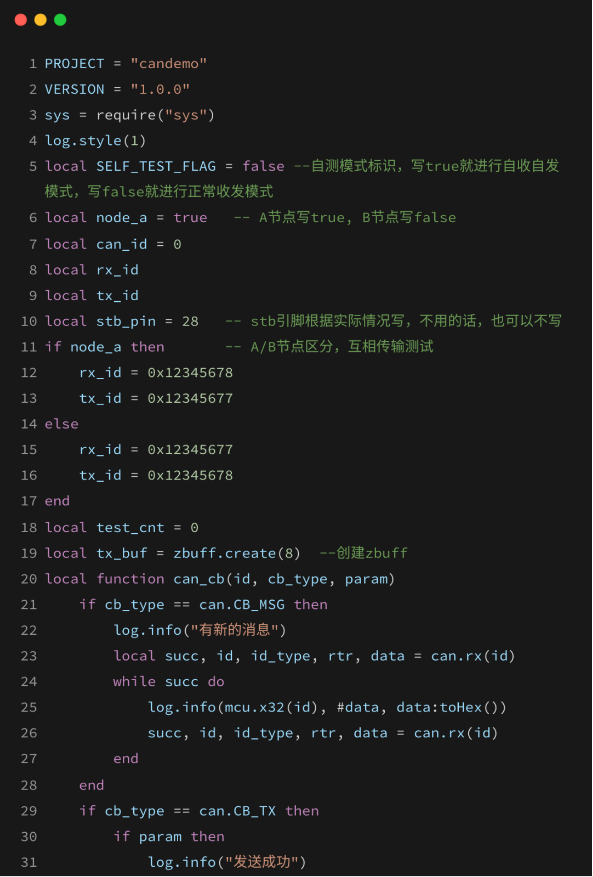
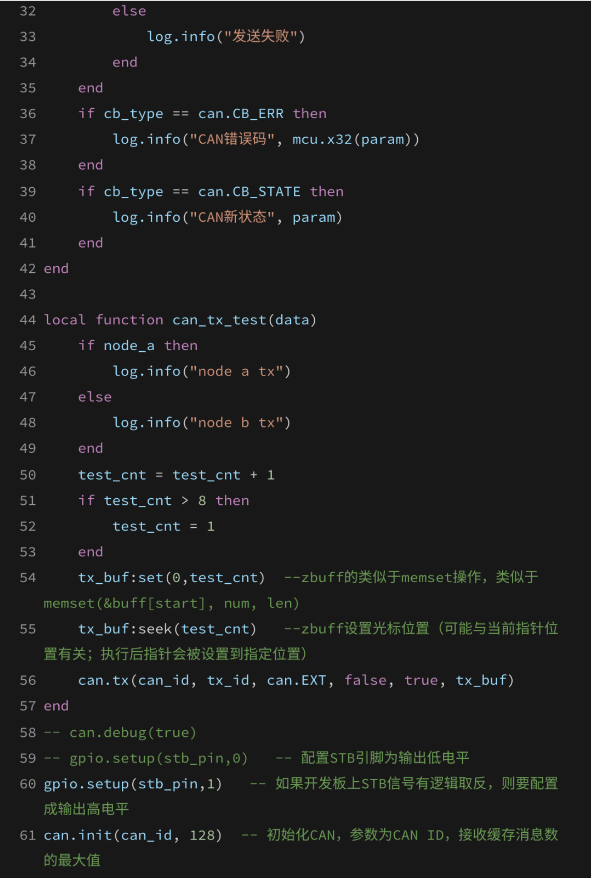
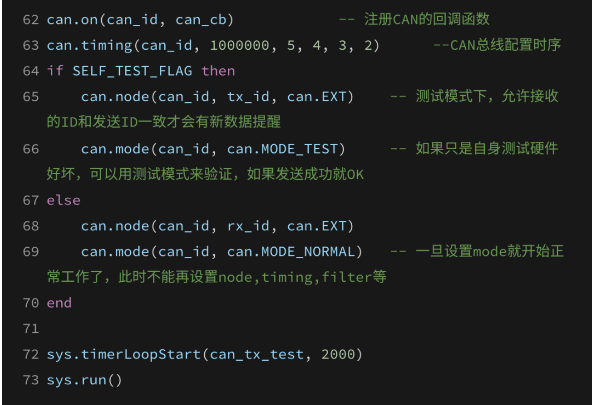
1)初始化CAN接口:

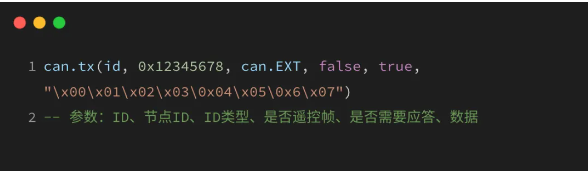
2)发送CAN帧:
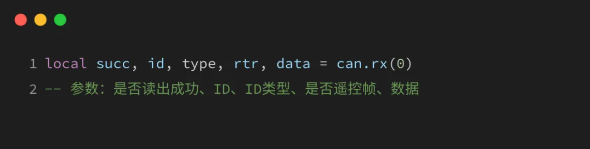
3)接收CAN帧:
1)波特率匹配:
所有CAN节点的波特率必须一致,否则通信失败。
2)资源限制:
单帧最大8字节,需分包传输大数据。
频繁发送可能占用CPU资源,建议使用DMA或轮询。
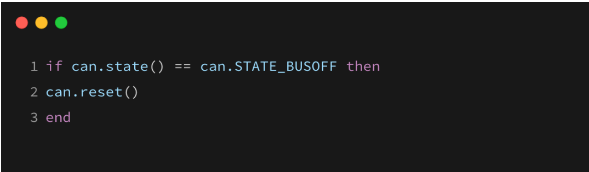
3)错误恢复:
监控错误计数器,超过阈值时重启接口:
1)工业物联网:
如:设备状态监测、传感器数据采集。
2)智能电网:
如:远程抄表、设备控制。
1)硬件层面:
增加信号屏蔽层或缩短总线长度以减少干扰。
2)软件层面:
采用DMA传输减少CPU占用;实现心跳包机制检测链路状态。
https://gitee.com/openLuat/LuatOS-Air780EPM/blob/master/demo/can/main.lua
1)检查清单:
确认CAN收发器电源和接地正常。
终端电阻是否正确安装。
管脚初始化配置与硬件手册一致例如:
CAN_TXD/CAN_RXD/CAN_STB引脚
波特率设置是否匹配其他节点。
2)工具辅助:
使用CAN分析仪(如Vector CANalyzer)捕获信号。
可能如下原因导致:
波特率不匹配导致帧同步失败;
总线干扰或信号完整性问题(如走线过长、未加终端电阻);
发送间隔过短导致缓冲区溢出。
今天的内容就分享到这里了~



 /1
/1 







文章评论(0条评论)
登录后参与讨论