
TRINAMIC的TMCM-612在光纤拉锥机中的应用
随着通讯市场新增值业务如可视电话、IPTV、网络游戏等的不断推出,用户对带宽的要求不断提高,现有的以铜缆为主的XDSL网络已不能适应用户的需求。光进铜退已是大势所趋,特别一些发达国家如日本、美国、韩国等已将光纤到户(FTTH)作为国家战略加以鼓励发展。无源光网络(PON)已经成为各国FTTH的首选接入方案,目前世界上大多的光纤及生产设备已转移至中国,进而为中国的光机电一体化产业注入新的活力。
而光纤耦合器作为连接光线路终端和光网络单元的核心光器件成为现代光通信中被广泛应用的关键光器件,而拉锥机系统是生产光纤耦合器主要设备。
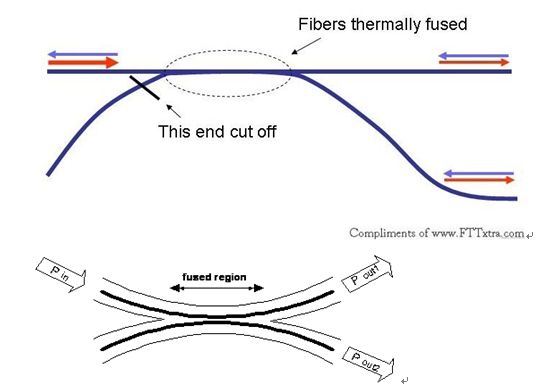
简单地讲就是利用熔融拉锥技术在拉锥机上熔融拉伸最终的产物就是光纤耦合器。而所谓的熔融拉锥技术是将2根或多根光纤捆在一起,然后在拉锥机上熔融拉伸,拉伸过程中监视各路光纤耦合分光比,分光比达到要求后结束熔融拉伸,其中一端保留一根光纤(其余剪掉)作为输入端,另一端作为多路输出端。
光纤熔融拉锥机简单原理:熔融拉锥的基本方法就是将两根光纤或以上)去除涂覆层的光纤以一定的方式靠拢,在高温加热下熔融,同时向两侧拉伸,最终在加热区形成双锥体结构的特殊波导器件。当两根光纤融合时,输入光信号从一根光纤进入两根光纤.假定两根光纤规格相同,输入光功率为P0,那么拉锥过程中两根光纤的光功率分配分别为Pocosz 和 inz ,其中入是由光纤芯径、输入光波长等参数决定的耦合常数, 是拉锥长度。在光纤种类和波长确定的情况下,根据光功率的分配变化精确控制拉锥长度、熔融区大小、熔融温度,可以制做出各种光耦合器件。
光纤熔融拉锥机是一种高精度、高效率、高可靠、结构紧凑和方便使用的制造系统,用于批量生产熔融光纤耦合器,尤其是超低附加损耗(典型值0.05dB)的标准光纤耦合器、宽带光纤耦合器、波分复用器和其他熔融光纤耦合器,具有高重复性的特点。
拉锥机是一种高精度、高效率、高可靠、结构紧凑的制造系统,用于批量生产光纤耦合器。
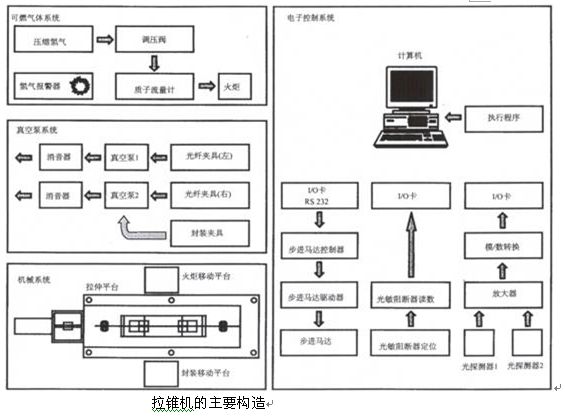
拉锥机是一个复杂的系统主要涉及到:机械装置、电子控制系统、可燃气体系统、真空泵系统多个领域。
光纤夹具:用于将放在拉锥机上的光纤位置固定
拉伸平台:负责在熔融过程中拉伸光纤的载体
火炬移动平台:在光纤的左右两测移动火炬加热光纤
封装夹具移动平台:用于在熔融结束后对光纤进行封装
计算机:在PC机中有完整的软件负责控制监视拉锥的整个过程
I/O接口:用于数字模拟量的处理,输出控制,控制火焰,气体的开关
步进电机的控制:在对光纤的火炬加热、拉伸和封装的运动控制中会使用到6个步进马达。
光信号探测器、光开关和封装加热器
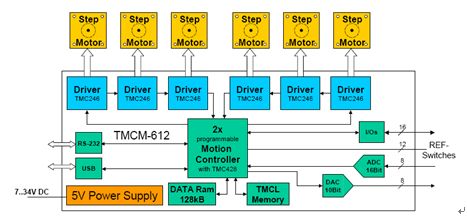
整个系统配置如下图所示:
在步进马达的控制上各个厂家使用的方法不一,但都存在一些诸如发热量大、不可靠、不稳定等问题,部分厂家为此在寻求自己开发控制产品,来解决此问题,现对拉锥机中应用的6个步进电机的作用作出说明。归纳起来只要用在控制火炬的移动、光纤的拉伸和光纤的封装。在火炬控制上步进电机要实现3维的加热,前后、上下、左右不同角度加热光纤。而拉伸平台由一步进电机带动一个双向罗纹的丝杆实现在电机旋转时将光纤往两个不同方向拉伸。在光纤的两侧装有封装设备由两个步进电机控制实现往返运动。具体控制是火炬三维加热光纤的同时,拉伸平台对光纤进行拉伸,当光纤的分光比达到要求之后由封装部分对光纤进行封装。是一加热和拉伸是同步进行,而和封状工序是顺序进行。
目前大多数的厂家对步进电机的控制和数据采集都是分开的,这样一来增加体积。如部分厂家使用2块3轴的控制卡+数据采集卡+6个步进驱动器+工控机,这样做存在的问题是2块控制卡和6个驱动器之间的控制加电源线至少36根线再加上电机到驱动器之间的24根线60多根线在一个控制箱内机器启动后产生的热量和电磁干扰严重影响性能,部分控制卡插在电脑的PCI插槽内有时会发生接触不良,运动控制和数据采集分离增加软件部分的控制难度。许多厂家在寻找更好的解决方案:如果能将6个步进电机所有的控制,驱动,数据采集完全集中在一块PCB中那么以上的问题将可以得以解决,但是一直以来由于技术的限制步进驱动器的体积很难做得很小,如今在国外步进驱动芯片的低功耗设计已经问世诸多散热,体积问题得以解决。
德国TRINAMIC公司是一家半导体公司一直在致力于步进、直流无刷马达的控制方面研究,已成功研发多项专利技术,为客户减少成本。该公司开发的TMCM-612模块集成6轴步进电机的控制驱动以及数据采集功能,具体性能如下:
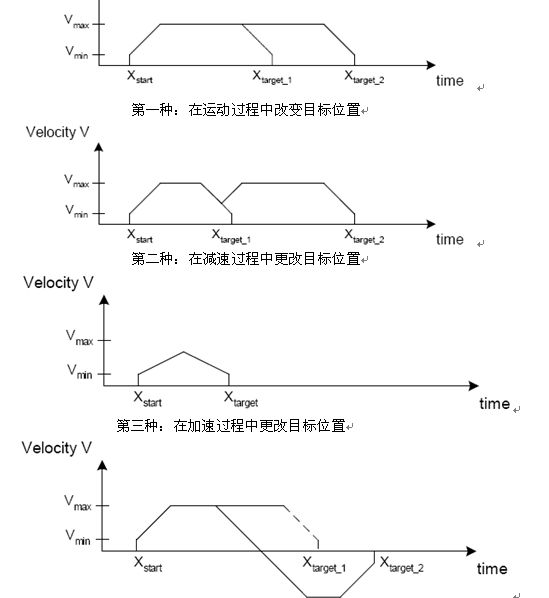
即时的位置更改功能对拉锥机很关键,传统的控制器在位置控制时,只有先当前一个位置指令完成后才能执行下一个位置控制,如果在出现拉伸出现问题后并不能及时补救。而TMCM-612可以在电机不同状态及时改变目标位置如下图所示



 /5
/5 







文章评论(0条评论)
登录后参与讨论